1.本技术实施例属于换电设备技术领域,尤其涉及一种移动换电车及移动换电控制系统。
背景技术:
2.目前,电动汽车的电能补给模式主要有充电模式和换电模式。充电模式是指对电动汽车的亏电电池进行充电。换电模式是指将电动汽车的亏电电池更换为满电电池。与充电模式相比,换电模式具有效率高、成本低等优点,尤其对于用于专线运输且具有较大电池容量的重型纯电卡车。
3.相关技术中,通常采用移动换电车对电动汽车进行换电。移动换电车一般安装有距离传感器,用于测量电动汽车与移动换电车之间的距离。根据该测得的距离对电动汽车上电池的位置进行判断,然后控制移动换电车对电动汽车进行换电。
4.但是,相关技术中的移动换电车,获取的电动汽车上电池的位置精度低,使得对电动汽车的电池位置产生误判,从而使得移动换电车易与电动汽车发生碰撞,导致移动换电车和/或电动汽车发生损坏。
技术实现要素:
5.有鉴于此,本技术实施例提供一种移动换电车及移动换电控制系统,以解决获取电动汽车上电池的位置精度低的技术问题。
6.本技术实施例第一方面提供一种移动换电车,包括车体、折臂吊机、取放装置和相机;所述车体上安装有距离传感器,所述距离传感器用于测量车体与电动汽车之间的距离;所述折臂吊机具有安装端和自由端,所述折臂吊机的安装端连接于所述车体上;所述取放装置连接于所述折臂吊机的自由端,用于取放电池;所述相机安装于所述取放装置上,用于获取电动汽车中电池的图像。
7.本技术实施例的移动换电车,对电动汽车进行换电时,首先,电动汽车驶向移动换电车,并停靠至车体附近的预设区域内。距离传感器对电动汽车与车体之间的距离进行测量,根据测得的距离确定电动汽车中电池的位置范围。控制折臂吊机动作,以使取放装置移动至电动汽车中电池的位置范围内。相机获取电池的图像,根据电池的图像确定电池的位置。取放装置拿取电动汽车中电池。控制折臂吊机动作,折臂吊机带动取放装置及电池移动至车体上方。取放装置将电池放置于车体上。
8.然后,控制折臂吊机动作,折臂吊机带动取放装置移动至车体上另一电池的位置范围内,取放装置拿取另一电池。再次控制折臂吊机动作,折臂吊机带动取放装置及另一电池移动至电动汽车中电池的位置范围内,取放装置将另一电池安装于电动汽车上。
9.本技术实施例的移动换电车,设置有距离传感器和相机,距离传感器用于测量车体与电动汽车之间的距离,相机用于获取电动汽车中电池的图像。在对电动汽车进行换电的过程中,首先根据距离传感器所测得的车体与电动汽车之间的距离获取电池的位置范
围,控制取货装置及相机进入该位置范围内。然后,再根据相机获取的该位置范围内电池的图像确定电池的位置。与相关技术中,仅通过距离传感器所测得的车体与电动汽车之间的距离获取电池位置相比,本技术实施例的移动换电车提高了电池位置的测量精度,防止对电动汽车中电池的位置产生误判,从而防止移动换电车与电动汽车因碰撞而发生损坏。
10.在一种可能的实现方式中,所述移动换电车还包括用于调整所述取放装置的姿态的调整机构,所述调整机构包括安装座、第一连接座、第一转轴和第一伸缩缸,所述安装座连接于所述折臂吊机的自由端,所述安装座和所述第一连接座通过所述第一转轴转动连接;
11.所述第一连接座连接所述取放装置;
12.所述第一伸缩缸包括第一缸体和第一伸缩杆,所述第一缸体安装于所述安装座上;所述第一伸缩杆垂直所述第一转轴,且抵顶所述第一连接座。
13.在一种可能的实现方式中,所述调整机构还包括第二连接座、第二转轴和第二伸缩缸,所述第二连接座通过所述第二转轴与所述第一连接座转动连接,所述第二转轴垂直所述第一转轴;
14.所述第二连接座连接所述取放装置;
15.所述第二伸缩缸包括第二缸体和第二伸缩杆,所述第二缸体安装于所述第一连接座上;所述第二伸缩杆垂直所述第二转轴,且抵顶所述第二连接座。
16.在一种可能的实现方式中,所述调整机构还包括第一回转马达,所述第一回转马达位于所述第二连接座和所述取放装置之间,所述第一回转马达的回转轴垂直所述第一转轴与所述第二转轴,且连接所述第二连接座和所述取放装置。
17.在一种可能的实现方式中,所述移动换电车还包括第一角度传感器、第二角度传感器和第三角度传感器;
18.所述第一角度传感器与所述第一转轴连接,用于测量所述取放装置绕所述第一转轴转动时的俯仰角度;
19.所述第二角度传感器与所述第二转轴连接,用于测量所述取放装置绕所述第二转轴转动时的摆转角度;
20.所述第三角度传感器与所述第一回转马达连接,用于测量所述取放装置绕所述第一回转马达的回转轴转动时的旋转角度。
21.在一种可能的实现方式中,所述取放装置包括底板、卡爪和第三伸缩缸,所述底板与所述第一回转马达连接;
22.所述卡爪有多个,多个所述卡爪连接于所述底板背向所述第一回转马达的一侧;
23.所述第三伸缩缸包括第三缸体和第三伸缩杆,所述第三缸体安装于所述底板上,所述第三伸缩杆与所述卡爪连接。
24.在一种可能的实现方式中,所述移动换电车还包括第一长度传感器,用于测量所述卡爪的伸缩长度。
25.本技术实施例第二方面提供一种移动换电控制系统,包括距离传感器、相机和控制器,所述距离传感器用于测量车体与电动汽车之间的距离;
26.所述相机用于获取电动汽车中电池的图像;
27.所述控制器与所述距离传感器、所述相机、折臂吊机和取放装置均电连接,用于根
据车体与电动汽车之间的距离获取电池的位置范围,根据电动汽车中电池的图像获取电池的位置,以及根据电池的位置控制所述折臂吊机和所述取放装置拿取电池。
28.本技术实施例的移动换电控制系统,设置有距离传感器和相机,距离传感器用于测量车体与电动汽车之间的距离,相机用于获取电动汽车中电池的图像。在对电动汽车进行换电的过程中,首先根据距离传感器所测得的车体与电动汽车之间的距离获取电池的位置范围,控制取货装置及相机进入该位置范围内。然后,再根据相机获取的该位置范围内电池的图像确定电池的位置。与相关技术中,仅通过距离传感器所测得的车体与电动汽车之间的距离获取电池位置相比,本技术实施例的移动换电控制系统提高了电池位置的测量精度,防止对电动汽车中电池的位置产生误判,从而防止移动换电车与电动汽车因碰撞而发生损坏。
29.在一种可能的实现方式中,所述移动换电控制系统还包括与所述控制器电连接的第一角度传感器、第二角度传感器和第三角度传感器;所述第一角度传感器用于测量所述取放装置的俯仰角度;
30.第二角度传感器用于测量所述取放装置的摆转角度;
31.第三角度传感器用于测量所述取放装置的旋转角度。
32.在一种可能的实现方式中,所述移动换电控制系统还包括第一长度传感器,第一长度传感器与所述控制器电连接,用于测量所述取放装置的卡爪的伸缩长度。
附图说明
33.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
34.图1为本技术实施例的移动换电车的第一视角结构示意图;
35.图2为图1中的移动换电车的第二视角结构示意图;
36.图3为图2中折臂吊机及取放装置的结构示意图;
37.图4为调整机构的结构示意图;
38.图5为本技术实施例的移动换电控制系统的示意图;
39.图6为液压源与各伸缩缸的连接示意图。
40.附图标记说明:
41.10-车体;
42.110-底盘;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111-轮组;
43.112-存储位;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
113-底托;
44.114-锁扣;
45.20-折臂吊机;
46.210-底座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
220-第一节臂;
47.221-第二回转马达;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
230-第二节臂;
48.240-第五伸缩缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
250-第三节臂;
49.30-取放装置;
50.310-底板;320-卡爪;
51.40-相机;
52.50-调整机构;
53.510-安装座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
520-第一连接座;
54.530-第一转轴;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
540-第一伸缩缸;
55.541-第一缸体;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
542-第一伸缩杆;
56.550-第二连接座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
560-第二转轴;
57.570-第二伸缩缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
571-第二缸体;
58.572-第二伸缩杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
580-第一回转马达;60-电池;
59.70-移动换电控制系统;
60.710-控制器;
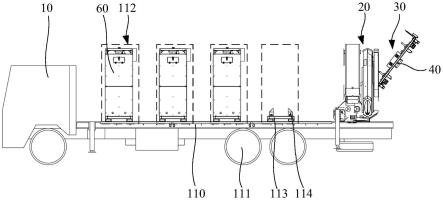
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
720-折臂吊机控制单元;
61.721-第四伸缩缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
722-第六伸缩缸;
62.730-折臂吊机检测单元;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
731-第四角度传感器;
63.732-第五角度传感器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
733-第六角度传感器;
64.734-第二长度传感器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
740-取放装置控制单元;
65.741-第三伸缩缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
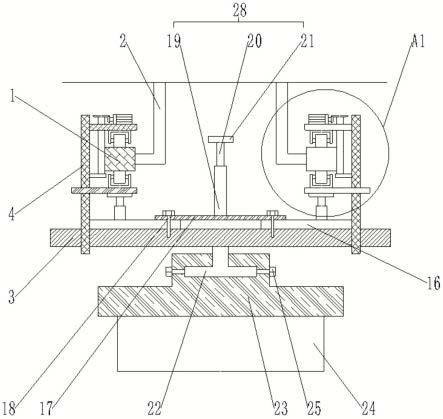
750-取放装置检测单元;
66.751-第一角度传感器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
752-第二角度传感器;
67.753-第三角度传感器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
754-第一长度传感器;
68.760-电池位置检测单元;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
761-距离传感器;
69.770-加解锁控制单元;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
771-加解锁伸缩缸;
70.780-过载保护单元;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
781-压力传感器;
71.790-远程控制单元;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
791-接收器;
72.792-遥控器;
73.80-液压源;
74.810-液压油箱;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
820-液压泵。
具体实施方式
75.目前,电动汽车的电能补给模式主要有充电模式和换电模式。充电模式是指对电动汽车的亏电电池进行充电。换电模式是指将电动汽车的亏电电池更换为满电电池。与充电模式相比,换电模式具有效率高、成本低等优点。
76.例如,对于应用于煤炭洗煤厂至铁路、港口等专线运输的重型纯电卡车,其运输单程距离一般在100km以内,由于运输路程较远,需配备容量较大的单块电池。然而,采用充电模式对重型纯电卡车进行电能补给时,受目前电池充电技术水平的限制,电池的充电效率较低,导致电池充电时间较长,严重影响了纯电卡车的运行。采用换电模式对重型纯电卡车进行电能补给时,仅需3-5分钟即可对电池进行更换,有效解决了电池充电时间长的问题。此外,目前市场上主流的纯电动重卡,配备的电池的电量通常为300kw以上,售价较高,增加了用户的购买成本。而换电模式是采用车电分离的方式,用户只需要购买未配备电池的车辆,电池采用租赁的方式,降低用户的购买成本。
77.相关技术中,通常采用移动换电车对电动汽车的电池进行更换。移动换电车一般
包括车体、折臂吊机和取放装置,折臂吊机安装于车体上,折臂吊机的端部连接有取放装置,取放装置用于取放电池。车体上还设置有距离传感器,用于测量车体与电动汽车之间的距离。
78.对电动汽车进行换电时,首先,电动汽车驶向移动换电车,并停靠至车体附近的预设区域内。距离传感器对电动汽车与车体之间的距离进行测量。根据测得的距离确定电动汽车中电池的位置,控制折臂吊机动作,折臂吊机带动取放装置移动,以使取放装置拿取电池安装位置上的电池。取放装置拿取电池后,控制折臂吊机再次动作,以使取放装置将电池放置于车体上。然后,控制折臂吊机动作,以使取放装置拿取车体上的另一电池;再次控制折臂吊机动作,以使取放装置带动另一电池移动至电动汽车上方,取放装置将另一电池安装于电动汽车的电池安装位置上。
79.但是,距离传感器的测量精度低,尤其当外界环境发生变化时,例如在雨雪天气、黑天等光线明暗变化强烈的环境中,距离传感器的测量精度进一步降低,从而降低了电动汽车与移动换电车之间距离的测量精度,使得对电动汽车的电池位置产生误判,移动换电车易与电动汽车发生碰撞,导致移动换电车和/或电动汽车发生损坏。
80.为了解决相关技术中获取电动汽车上电池的位置精度低的技术问题。本技术实施例提供一种移动换电系统,距离传感器用于测量车体与电动汽车之间的距离,相机用于获取电动汽车中电池的图像。在对电动汽车进行换电的过程中,首先根据距离传感器所测得的车体与电动汽车之间的距离获取电池的位置范围,控制取货装置及相机进入该位置范围内。然后,再根据相机获取的该位置范围内电池的图像确定电池的位置。与相关技术中,仅通过距离传感器所测得的车体与电动汽车之间的距离以获取电池的位置相比,本技术实施例的移动换电车提高了电池位置的测量精度,防止对电动汽车中电池的位置产生误判,从而防止移动换电车与电动汽车因碰撞而发生损坏。
81.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
82.参考图1及图2,本技术实施例的移动换电车,包括车体10、折臂吊机20、取放装置30和相机40。示例性地,移动换电车的总高度可以小于4m,总宽度可以小于2.55m。车体10上安装有距离传感器,距离传感器用于测量车体10与电动汽车之间的距离。折臂吊机20具有安装端和自由端,折臂吊机20的安装端连接于车体10上。取放装置30连接于折臂吊机20的自由端,用于取放电池60。相机40安装于取放装置30上,用于获取电动汽车中电池60的图像。
83.对电动汽车进行换电时,首先,电动汽车驶向移动换电车,并停靠至车体10附近的预设区域内。距离传感器对电动汽车与车体10之间的距离进行测量,根据测得的距离确定电动汽车中电池60的位置范围。示例性地,位置范围可以是长方体空间,长方体的体积可以为500mm
×
500mm
×
84.400mm至500mm
×
500mm
×
1300mm,电池60位于该长方体空间内。控制折臂吊机20动作,以使取放装置30移动至电动汽车中电池60的位置范围内。相机40获取电池60的图像,根据电池60的图像确定电池60的位置。取放装置30拿取电动汽车中电池60。控制折臂吊机20
动作,折臂吊机20带动取放装置30及电池60移动至车体10上方。取放装置30将电池60放置于车体10上。
85.然后,控制折臂吊机20动作,折臂吊机20带动取放装置30移动至车体10上另一电池60的位置范围内,取放装置30拿取另一电池60。再次控制折臂吊机20动作,折臂吊机20带动取放装置30及另一电池60移动至电动汽车中电池60的位置范围内,取放装置30将另一电池60安装于电动汽车上。
86.在对电动汽车进行换电的过程中,首先根据距离传感器所测得的车体10与电动汽车之间的距离获取电池60的位置范围,控制取货装置30及相机40进入该位置范围内。然后,再根据相机40获取的该位置范围内电池60的图像确定电池60的位置。与相关技术中,仅通过距离传感器所测得的车体10与电动汽车之间的距离获取电池60位置相比,本技术实施例的移动换电车提高了电池60位置的测量精度,防止对电动汽车中电池60的位置产生误判,从而防止移动换电车与电动汽车因碰撞而发生损坏。
87.参考图1及图2,车体10用于装载电池60,并带动电池60进行移动。示例性地,车体10具有底盘110,底盘110下方配置有多个轮组111,多个轮组111中的至少部分轮组为驱动轮组,以驱动车体10进行移动。例如,多个轮组的数量可以为六个,其中四个轮组为驱动轮组。可以理解的是,可以根据装载的电池60的数量,对多个轮组的数量以及多个轮组中驱动轮组的数量进行具体设定,以使车体10能够提供足够的牵引力。
88.底盘110的上方具有用于存放电池60的多个存储位112。多个存储位112相互间隔设置,以为电池60预留安全空间。多个存储位112中,至少一个存储位112可以为缓存位,例如图1中未放置电池60的存储位即为缓存位,缓存位用于存放从电动汽车中取下的电池60。
89.示例性地,每个存储位112上均设置有底托113,底托113用于存放电池60。底托113上还可以设置有锁扣114,锁扣114具有锁紧状态和解锁状态。锁扣114处于锁紧状态时,能够对放置于底托113上的电池60进行锁紧,以将电池60固定于底托113上,防止车体10移动时电池60发生晃动或移动。锁扣114处于解锁状态时,能够解除锁扣114对放置于底托113上的电池60的锁定,以便于取放装置30拿取电池60。示例性地,锁扣114的锁紧状态可通过加解锁伸缩缸进行控制。示例性地,解锁伸缩缸可以为液压控制的伸缩缸。
90.示例性地,车体10中还可以配备有为电池60进行充电的充电装置,充电装置的充电插头可以设置于底托113上。当将电池60放置于底托113上时,充电插头可以插接于电池60的充电口中,以对电池60进行充电。
91.示例性地,底盘110上还可以设置有保护罩,保护罩可罩设于底托113上,以对底托113、锁扣114及充电插头起到防水防尘等保护作用。
92.参考图2及图3,折臂吊机20可以包括底座210、第一节臂220、第四伸缩缸、第二节臂230、第五伸缩缸240和第三节臂250。底座210安装于车体10上,底座210即为折臂吊机20的安装端。示例性地,底座210可安装于车体10的尾部,以避免换电过程中折臂吊机20与车体10的其他部分发生干涉,便于对电动汽车的电池60进行更换。
93.示例性地,第一节臂220与底座210转动连接。示例性地,参考图3,折臂吊机20还可以包括第二回转马达221,第二回转马达221位于第一节臂220与底座210之间,第二回转马达221的回转轴沿图3中所示的第三方向z设置,第一节臂220的第一端与底座210之间通过第二回转马达221转动连接。据此,可通过控制第二回转马达221的回转角度对折臂吊机20
绕第三方向z的转动角度进行调整。示例性地,第二回转马达221可以为液压控制的回转马达。
94.示例性地,第二回转马达221上还可以安装有第四角度传感器,第四角度传感器可以对折臂吊机20绕第三方向z转动的角度进行测量,以实现对折臂吊机20的自动控制。
95.示例性地,第一节臂220的第一端可通过第三转轴与底座210转动连接,第三转轴沿图3中所示的第一方向x设置,第一方向x与第三方向z垂直。第四伸缩缸包括第四缸体和第四伸缩杆,第四伸缩杆可相对于第四缸体进行伸缩。第四缸体连接于底座210上,第四伸缩杆的伸出端与第一节臂220铰接。第四伸缩杆相对于第四缸体进行伸缩时,能够带动第一节臂220相对于底座210绕第三转轴的轴线转动。据此,可通过控制第四伸缩缸对第一节臂220的转动角度进行调整,即对第一节臂220的展开程度进行调整。示例性地,第四伸缩缸可以为液压控制的伸缩缸。
96.示例性地,第三转轴上还可以安装有第五角度传感器,第五角度传感器用于测量第一节臂220相对于底座210所转动的角度,从而能够获得第一节臂220展开的程度,以实现对折臂吊机20的自动控制。
97.示例性地,第四伸缩缸的第四缸体内可以设置有压力传感器,压力传感器可用于测量第四缸体内的压力,根据第四缸体的压力,可以判断第四伸缩缸所提供的用于推动第一节臂220以及与第一节臂220连接的其他结构的推力,从而根据该推力判断折臂吊机20是否过载。示例性地,压力传感器的数量可以有多个,多个压力传感器可分别设置于第四缸体的设置有第四伸缩杆的腔体和未设置第四伸缩杆的腔体内,如此设置,能够提高第四缸体内的压力的测量精度,以进一步提高判断折臂吊机20是否过载的准确性。
98.第二节臂230的第一端与第一节臂220的第二端绕第一方向x转动连接,第一方向x与第三方向z垂直。示例性地,第二节臂230的第一端可通过第四转轴与第一节臂220的第二端转动连接,第四转轴沿第一方向x设置。第五伸缩缸240连接第一节臂220和第二节臂230,以驱动第二节臂230相对于第一节臂220绕第四转轴转动。第五伸缩缸240包括第五缸体和第五伸缩杆,第五伸缩杆可相对于第五缸体进行伸缩。第五缸体连接于第一节臂220的第一端,第五伸缩杆的伸出端与第二节臂230铰接。示例性地,第五伸缩杆的伸出端与第二节臂230的连接位置可以靠近第四转轴。第五伸缩杆相对于第五缸体进行伸缩时,能够带动第二节臂230相对于第一节臂220绕第四转轴的轴线转动。据此,可通过控制第五伸缩缸240对第二节臂230的转动角度进行调整,即对第二节臂230的展开程度进行调整。示例性地,第五伸缩缸240可以为液压控制的伸缩缸。示例性地,第一节臂220和第二节臂230的展开范围可以为8m。
99.示例性地,第四转轴上还可以安装有第六角度传感器,第六角度传感器用于测量第二节臂230相对于第三节臂250所转动的角度,从而获得第二节臂230的展开程度,以实现对折臂吊机20的自动控制。
100.第三节臂250可以为具有伸缩功能的伸缩臂。第三节臂250内可以设置有第六伸缩缸,第六伸缩缸用于驱动第三节臂250进行伸缩。据此,可通过控制第六伸缩缸对第三节臂250的伸缩长度进行调整。第三节臂250上还可以设置有第二长度传感器,第二长度传感器用于测量第三节臂250的伸缩长度。
101.参考图3,取放装置30用于取放电池60。示例性地,取放装置30可以包括底板310、
卡爪320和第三伸缩缸,底板310连接于第三节臂250的第二端,第三节臂250的第二端即为折臂吊机20的自由端。卡爪320有多个,多个卡爪320可以连接于底板310背向第三节臂250的一侧。第三伸缩缸包括第三缸体和第三伸缩杆,第三伸缩杆可相对于第三缸体进行伸缩,第三缸体安装于底板310上,第三伸缩杆与卡爪320连接。第三伸缩杆相对于第三缸体进行伸缩时能够带动卡爪320对电池60进行夹紧与放开。示例性地,移动换电车还可以包括第一长度传感器,用于测量卡爪320的伸缩长度,以确定卡爪320是否处于卡紧状态。
102.参考图3及图4,移动换电车还可以包括用于调整取放装置30的姿态的调整机构50。在移动换电车对电动汽车进行换电的过程中,当相机40获取电动汽车的电池60的位置后,可通过调整机构50对取放装置30进行调整,并控制取放装置30抓取电动汽车的电池60,以实现电动汽车中电池60的自动抓取。
103.示例性地,调整机构50可以包括安装座510、第一连接座520、第一转轴530和第一伸缩缸540。安装座510连接于折臂吊机20的自由端,例如第三节臂250的第二端。第一转轴530可沿图4中所示的第四方向l设置,安装座510和第一连接座520通过第一转轴530转动连接。第一连接座520连接取放装置30。第一伸缩缸540包括第一缸体541和第一伸缩杆542,第一缸体541安装于安装座510上。第一伸缩杆542垂直第一转轴530,且抵顶第一连接座520。第一伸缩杆542可相对于第一缸体541进行伸缩。第一伸缩杆542伸缩时,能够推动第一连接座520,使得第一连接座520相对于安装座510绕第一转轴530的轴线转动,从而使得第一连接座520带动取放装置30绕第一转轴530进行俯仰。据此,可通过控制第一伸缩缸540中第一伸缩杆542的伸缩长度对取放装置30的俯仰角度进行调整。示例性地,第一伸缩缸540可以为液压控制的伸缩缸。
104.示例性地,参考图4,调整机构50还包括第二连接座550、第二转轴560和第二伸缩缸570,第二转轴560垂直第一转轴530,即第二转轴560沿图4中所示的第五方向m设置,第二连接座550通过第二转轴560与第一连接座520转动连接。第二连接座550可以连接取放装置30。第二伸缩缸570包括第二缸体571和第二伸缩杆572,第二缸体571安装于第一连接座520上。第二伸缩杆572垂直第二转轴560,且抵顶第二连接座550。第二伸缩杆572可相对于第二缸体571进行伸缩。第二伸缩杆572伸缩时,能够推动第二连接座550,使得第二连接座550相对于第一连接座520绕第二转轴560的轴线转动,从而使得第二连接座550带动取放装置30绕第二转轴560进行摇摆。据此,可通过控制第二伸缩缸570中第二伸缩杆572的伸缩长度对取放装置30的摇摆角度进行调整。示例性地,第二伸缩缸570可以为液压控制的伸缩缸。
105.示例性地,参考图4,调整机构50还可以包括第一回转马达580,第一回转马达580位于第二连接座550和取放装置30之间,第一回转马达580的回转轴垂直第一转轴530与第二转轴560,即第一回转马达580的回转轴可以沿如图4中所示的第六方向n设置。第二连接座550和取放装置30通过第一回转马达580连接。例如,取放装置30中的底板310与第一回转马达580连接。多个卡爪320可连接于底板310背向第一回转马达580的一侧。第一回转马达580回转时,使得取放装置30绕第一回转马达580的回转轴进行旋转。据此,可通过控制第一回转马达580的回转角度对取放装置30的旋转角度进行调整。示例性地,第一回转马达580可以为通过液压控制的回转马达。
106.移动换电车还可以包括第一角度传感器、第二角度传感器和第三角度传感器。第一角度传感器与第一转轴530连接,用于测量取放装置30绕第一转轴530转动时的俯仰角
度。第二角度传感器与第二转轴560连接,用于测量取放装置30绕第二转轴560转动时的摆转角度。第三角度传感器与第一回转马达580连接,用于测量取放装置30绕第一回转马达580的回转轴转动时的旋转角度。如此设置,通过第一角度传感器测量取放装置30的俯仰角度,第二角度传感器测量取放装置30的摇摆角度,以及第三角度传感器测量取放装置30的摇摆角度,可实现对取放装置30的自动控制。
107.参考图5,本技术实施例第二方面提供一种移动换电控制系统70,包括控制器710,以及与控制器710电连接的折臂吊机控制单元720、折臂吊机检测单元730、取放装置控制单元740、取放装置检测单元750和电池位置检测单元760。控制器710通过折臂吊机控制单元720对折臂吊机20进行控制。折臂吊机检测单元730对折臂吊机20的姿态进行测量,控制器710能够获取折臂吊机20的姿态,以实现对折臂吊机20的闭环控制。控制器710通过取放装置控制单元740对取放装置30进行控制。取放装置检测单元750对取放装置30的姿态进行测量,控制器710能够获取取放装置30的姿态,以实现对取放装置30的闭环控制。
108.示例性地,折臂吊机控制单元720可以包括第二回转马达221、第四伸缩缸721、第五伸缩缸240和第六伸缩缸722。第二回转马达221能够在控制器710的控制下,带动第一节臂220以及与第一节臂220连接其他结构绕第二回转马达221的回转轴进行转动,即能够对折臂吊机20绕第三方向z的转动角度进行调整。第四伸缩缸721能够在控制器710的控制下,推动第一节臂220相对于底座210绕第三转轴进行转动,即能够对第一节臂220绕第一方向x的转动角度进行调整,也即对第一节臂220的展开程度进行调整。第五伸缩缸240能够在控制器710的控制下,推动第二节臂230相对于第一节臂220绕第四转轴进行转动,即能够对第二节臂230绕第一方向x的转动角度进行调整,也即对第二节臂230的展开程度进行调整。第六伸缩缸722能够在控制器710的控制下,带动第三节臂250进行伸缩,即对第三节臂250的伸缩长度进行调整。
109.示例性地,折臂吊机检测单元730可以包括第四角度传感器731、第五角度传感器732、第六角度传感器733和第二长度传感器734。第四角度传感器731可以对第一节臂220相对于底座210绕第三方向z所转动的角度进行测量。第五角度传感器732能够对第一节臂220相对于底座210绕第三转轴所转动的角度进行测量。第六角度传感器733可以对第二节臂230相对于第三节臂250第四转轴所转动的角度进行测量。第二长度传感器734可以对第三节臂250的伸缩长度进行测量。控制器710获取第四角度传感器731、第五角度传感器732、第六角度传感器733和第二长度传感器734所测得的信息后,可确定折臂吊机20绕第三方向z的转动角度,第一节臂220的展开程度,第二节臂230的展开程度,以及第三节臂250的伸缩长度。控制器710可根据上述信息对折臂吊机20进行闭环控制。
110.示例性地,取放装置控制单元740可以包括第一伸缩缸540、第二伸缩缸570、第一回转马达580和第三伸缩缸741。第一伸缩缸540能够在控制器710的控制下,推动第一连接座520相对于安装座510绕第一转轴530转动,即绕第四方向l转动,从而对取放装置30的俯仰角度进行调整,以适用停放于不同坡度路面上的电动汽车。第二伸缩缸570能够在控制器710的控制下,推动第二连接座550相对于第一连接座520绕第二转轴560转动,即绕第五方向m转动,从而对取放装置30的摇摆角度进行调整,以适用停放于不同坡度路面上的电动汽车。第一回转马达580能够在控制器710的控制下,带动取放装置30绕第一回转马达580的回转轴转动,即绕第六方向n转动,从而对取放装置30的旋转角度进行调整,以适用于电动汽
车停车时的误差。
111.示例性地,取放装置检测单元750可以包括第一角度传感器751、第二角度传感器752、第三角度传感器753和第一长度传感器754。第一角度传感器751可以对第一连接座520相对于安装座510绕第一转轴530转动的角度进行测量。第二角度传感器752可以对第二连接座550相对于第一连接座520绕第二转轴560转动的角度进行测量。第三角度传感器753能够对取放装置30相对于第二连接座550绕第一回转马达580的回转轴转动的角度进行测量。第一长度传感器754可以对取放装置30的卡爪320的伸缩长度进行测量。控制器710获取第一角度传感器751、第二角度传感器752、第三角度传感器753和第一长度传感器754所测得的信息后,可确定取放装置30的俯仰角度、摇摆角度、旋转角度以及卡爪320是否处于卡紧状态。控制器710可根据上述信息对取放装置30进行闭环控制。
112.移动换电控制系统70还可以包括电池位置检测单元760,电池位置检测单元760对电动汽车的电池位置进行检测。控制器710获取电动汽车的电池位置,对折臂吊机20和取放装置30进行控制,以实现换电操作。
113.示例性地,电池位置检测单元760可以包括距离传感器761和相机40。距离传感器761和相机40均与控制器710电连接。距离传感器761用于测量车体10与电动汽车之间的距离。相机40用于获取电动汽车中电池60的图像。控制器710能够根据车体10与电动汽车之间的距离确定电池60的位置范围,根据电动汽车中电池60的图像获取电池60的位置,并根据电池60的位置控制折臂吊机20和取放装置30拿取电池60。
114.对电动汽车进行换电时,首先,电动汽车驶向移动换电车,并停靠至车体10附近的预设区域内。距离传感器761对电动汽车与车体10之间的距离进行测量。控制器710获取该距离,并根据该距离确定电动汽车中电池60的位置范围。控制器710控制折臂吊机20动作,以使取放装置30移动至电动汽车中电池60的位置范围内。相机40获取电池60的图像。控制器710获取该图像,并根据该图像确定电池60的位置。控制器710控制取放装置30拿取电动汽车中电池60。控制器710控制折臂吊机20动作,折臂吊机20带动取放装置30及电池60移动至车体10上方。控制器710控制取放装置30将电池60放置于车体10上。
115.然后,控制器710控制折臂吊机20动作,折臂吊机20带动取放装置30移动至车体10上另一电池60的位置范围内。控制器710控制取放装置30拿取另一电池60。控制器710再次控制折臂吊机20动作,折臂吊机20带动取放装置30及另一电池60移动至电动汽车中电池60的位置范围内,控制器710控制取放装置30将另一电池60安装于电动汽车上。
116.在对电动汽车进行换电的过程中,首先根据距离传感器761所测得的车体10与电动汽车之间的距离获取电池的位置范围,控制器710控制取货装置30及相机40进入该位置范围内。然后,再根据相机40获取的该位置范围内电池60的图像确定电池60的位置。与相关技术中,仅通过距离传感器所测得的车体10与电动汽车之间的距离获取电池位置相比,本技术实施例的移动换电控制系统提高了电池60位置的测量精度,防止对电动汽车中电池60的位置产生误判,从而防止移动换电车与电动汽车因碰撞而发生损坏。
117.参考图5,移动换电控制系统70还可以包括加解锁控制单元770。示例性地,加解锁控制单元770可以包括加解锁伸缩缸771,加解锁伸缩缸771与控制器710电连接。加解锁伸缩缸771能够在控制器710的控制下,对底托113上的锁扣114进行控制,使得锁扣114在锁紧状态和解锁状态之间进行切换。
118.示例性地,参考图6,折臂吊机控制单元720中的第二回转马达221、第四伸缩缸721、第五伸缩缸240和第六伸缩缸722,取放装置控制单元740中的第一伸缩缸540、第二伸缩缸570、第一回转马达580和第三伸缩缸741,以及加解锁控制单元770中的加解锁伸缩缸771可以均为液压控制的伸缩缸。上述伸缩缸可通过电磁阀与液压源80连通。例如,电磁阀可以为两位六通电磁阀。示例性地,液压源80可以包括液压油箱810和液压泵820。示例性地,液压源80、电磁阀及连接管路可集成于底盘110的下方。
119.移动换电控制系统70还可以包括过载保护单元780。示例性地,过载保护单元780可以包括压力传感器781,压力传感器781与控制器710电连接。压力传感器781能够测量第四缸体内的压力。控制器710能够获取该压力,并根据该压力判断第四伸缩缸721所提供的用于推动第一节臂220以及与第一节臂220连接的其他结构的推力,从而根据该推力判断折臂吊机20是否过载,以对移动换电车进行过载保护。
120.移动换电控制系统70还可以包括远程控制单元790。示例性地,远程控制单元790可以包括接收器791和遥控器792,接收器791位于控制器710和遥控器792之间,并分别与控制器710和遥控器792电连接。遥控器792和控制器710之间可通过接收器791进行信息交互,从而实现远程控制以进行人工干预。
121.移动换电控制系统70还可以包括摄像头。摄像头与控制器710电连接。摄像头能够对移动换电车周围的环境进行监测。控制器710能够获取摄像头所拍摄的影像,并根据该影像判断移动换电车周围是否有行人、汽车等障碍物,以保证换电过程的顺利进行。示例性地,摄像头也可以更换为超声波传感器,本技术实施例对此不再赘述。
122.为便于对本技术实施例的技术方案的理解,下面对移动换电车对电动汽车进行换电的过程进行具体说明。
123.对电动汽车进行换电时,首先,电动汽车驶向移动换电车,并停靠至车体10附近的预设区域内。距离传感器761对电动汽车与车体10之间的距离进行测量。控制器710获取该距离,并根据该距离确定电动汽车中电池60的位置范围。
124.摄像头对移动换电车周围的环境进行监测。控制器710获取摄像头所拍摄的影像,并根据该影像判断移动换电车周围是否有行人、汽车等障碍物。如果存在障碍物,可发出声音或光线进行示警,或暂停下一步的动作;如果不存在障碍物,则进行下一步的动作。
125.如果不存在障碍物,控制器710控制折臂吊机20动作。示例性地,控制器710可通过控制第二回转马达221、第四伸缩缸721、第五伸缩缸240及第六伸缩缸722,对折臂吊机20绕第三方向z的转动角度,第一节臂220的展开程度,第二节臂230的展开程度及第三节臂250的伸缩长度进行调整。第四角度传感器731、第五角度传感器732、第六角度传感器733和第二长度传感器734能够对折臂吊机20绕第三方向z的转动角度,第一节臂220的展开程度,第二节臂230的展开程度及第三节臂250的伸缩长度进行测量,以实现对折臂吊机20的闭环控制。
126.控制器710可以向电动汽车发送解锁信息,以使电动汽车对待取下的电池60进行解锁。控制器710还可以控制加解锁伸缩缸771使底托113上的锁扣114处于解锁状态,以对更换的电池60进行解锁。
127.控制器710控制折臂吊机20带动取放装置30移动至电动汽车中电池60的位置范围内。相机40获取电池60的图像。控制器710获取该图像,并根据该图像确定电池60的位置。控
制器710根据电池60的位置控制取放装置30拿取电动汽车中电池60。控制器710可通过调整机构50对取放装置30进行调整,以实现对电动汽车中电池60的自动抓取。示例性地,控制器710可通过控制第一伸缩缸540、第二伸缩缸570、第一回转马达580和第三伸缩缸741,对取放装置30的俯仰角度、摇摆角度、旋转角度及卡爪320的状态进行控制。第一角度传感器751、第二角度传感器752、第三角度传感器753和第一长度传感器754能够对对取放装置30的俯仰角度、摇摆角度、旋转角度及卡爪320的状态进行测量,以实现对折臂吊机20的闭环控制。
128.取放装置30完成对电动汽车中电池60的抓取后,控制器710控制折臂吊机20动作,折臂吊机20带动取放装置30及电池60移动至车体10上方。控制器710控制取放装置30将电池60放置于车体10缓存位的底托113。
129.控制器710控制加解锁伸缩缸771使底托113上的锁扣114处于锁紧状态,以对放置于缓存位的底托113上的电池60进行锁紧。底托113上的充电插头可插接于电池60的充电口中,以对该电池60进行充电。
130.控制器710控制折臂吊机20和取放装置30移动至更换的电池60的位置范围内,并拿取更换的电池60。
131.控制器710再次控制折臂吊机20动作,折臂吊机20带动取放装置30及更换的电池60移动至电动汽车中电池60的位置范围内,控制器710控制取放装置30将更换的电池60安装于电动汽车上。在此过程中,可通过摄像头对移动换电车周围的环境进行监测,并根据该影像判断移动换电车周围是否有行人、汽车等障碍物。如果存在障碍物,可发出声音或光线进行示警。
132.然后,控制器710可以向电动汽车发送锁紧信息,以使电动汽车对更换的电池60进行加锁。
133.电池60安装于电动汽车上之后,控制器710可控制折臂吊机20及取放装置30收回,完成对电动汽车的换电。示例性地,控制器710具有位置及运动轨迹记忆功能,控制器710控制折臂吊机20及取放装置30收回时,可沿拿取电动汽车中的电池时的展开路线行进,以节省作业时间。
134.最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。