mems致动器、mems致动器的驱动方法和mems致动器控制程序
技术领域
1.本公开涉及mems致动器、mems致动器的驱动方法和mems致动器控制程序。
背景技术:
2.专利文献1中,公开了一种关于振镜和振镜的摆角控制方法的技术。该文献中记载的振镜是应用了微加工技术(mirco-machning)的微小光学系统,通过使微小的反射镜基板以扭转梁为旋转轴往复振动来使光束偏转。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2004-069731号公报
技术实现要素:
6.发明所要解决的技术问题
7.在使微小的可动部周期性移位的、例如振镜等的领域中,使用基于微电子机械系统(mems:micro electro mechanical systems)的致动器。在这样的技术领域中,在使可动部周期性移位时,对mems致动器的梳齿电极与移位的周期同步地周期性地施加驱动电压。而且,通过使驱动电压的频率与可动部的共振频率一致,能够使可动部以最大振幅移位。
8.然而,mems致动器的可动部的共振频率根据温度变化和湿度变化等而变动。当因可动部的共振频率的变动而导致驱动电压的频率偏离可动部的共振频率时,可动部的以最大振幅的动作会受到破坏。特别是,在mems致动器具有如弹性支承可动部的部分的弹性系数小等、可动部的最大振幅变大那样的结构的情况下,振幅相对于频率的非线性变大,即使驱动电压的频率稍微偏离可动部的共振频率,振幅也会大幅地减小。
9.另外,目前存在一种通过将mems致动器的温度控制为恒定来将可动部的共振频率保持为恒定的技术。然而,在这样的技术中需要增加用于温度控制的结构,会妨碍mems致动器的小型化。另外,无法抑制因湿度变化而导致的共振频率的变动。
10.为此,本公开的目的在于,提供一种mems致动器、mems致动器的驱动方法和mems致动器控制程序,能够与可动部的共振频率的变动无关地使驱动电压的频率接近该共振频率。
11.用于解决问题的技术手段
12.一个实施方式的mems致动器具备:基部与可动部,可动部被支承为相对于基部能够弹性移位;固定梳齿电极,其包括多个第一梳齿,并且设置于基部;可动梳齿电极,其包括与多个第一梳齿交替配置的多个第二梳齿,通过在可动梳齿电极与固定梳齿电极之间产生的静电力来驱动可动部;驱动电路,其在固定梳齿电极与可动梳齿电极之间施加驱动电压,该驱动电压具有周期性地反复上升和下降,并且包含在上升后且下降前成为恒定电压的期间的时间波形;和时刻检测电路,其将因固定梳齿电极与可动梳齿电极之间的电容的变化而在上述期间内从固定梳齿电极或可动梳齿电极输出的电流信号转换为电压信号,而生成
表示电容的微分值的电容微分信号,并检测电容微分信号到达阈值的时刻。驱动电路将在时刻检测电路检测的时刻与下降的时刻的关系控制成恒定。
13.另一个实施方式的mems致动器具备:基部与可动部,可动部被支承为相对于基部能够弹性移位;第一固定梳齿电极,其包括多个第一梳齿,并且设置于基部;第一可动梳齿电极,其包括与多个第一梳齿交替配置的多个第二梳齿,通过在第一可动梳齿电极与第一固定梳齿电极之间产生的静电力来驱动可动部;第二固定梳齿电极,其包括多个第三梳齿,并且设置于基部;第二可动梳齿电极,其包括与多个第三梳齿交替配置的多个第四梳齿;驱动电路,其在第一固定梳齿电极与第一可动梳齿电极之间施加驱动电压,该驱动电压具有周期性地反复上升和下降的时间波形;和时刻检测电路,其将包含成为除0v以外的恒定电压的期间的电压施加在第二固定梳齿电极与第二可动梳齿电极之间,将因第二固定梳齿电极与第二可动梳齿电极之间的电容的变化而在上述期间内从第二固定梳齿电极或第二可动梳齿电极输出的电流信号转换为电压信号,而生成表示电容的微分值的电容微分信号,并检测电容微分信号到达阈值的时刻。驱动电路将在时刻检测电路检测的时刻与下降的时刻的关系控制成恒定。
14.一个实施方式的mems致动器的驱动方法是一种mems致动器的驱动方法,mems致动器具备:基部与可动部,可动部被支承为相对于基板能够弹性移位;固定梳齿电极,其包括多个第一梳齿,并且设置于基部;和可动梳齿电极,其包括与多个第一梳齿交替配置的多个第二梳齿,通过在可动梳齿电极与固定梳齿电极之间产生的静电力来驱动可动部。该驱动方法包括在固定梳齿电极与可动梳齿电极之间施加驱动电压的驱动步骤,该驱动电压具有周期性地反复上升和下降,并且包含在上升后且下降前成为恒定电压的期间的时间波形。在驱动步骤中,将因固定梳齿电极与可动梳齿电极之间的电容的变化而在上述期间内从固定梳齿电极或可动梳齿电极输出的电流信号转换为电压信号,而生成表示电容的微分值的电容微分信号,并检测电容微分信号到达阈值的时刻,将该时刻与下降的时刻的关系控制成恒定。
15.另一个实施方式的mems致动器的驱动方法是一种mems致动器的驱动方法,mems致动器具备:基部与可动部,可动部被支承为相对于基部能够弹性移位;第一固定梳齿电极,其包括多个第一梳齿,并且设置于基部;第一可动梳齿电极,其包括与多个第一梳齿交替配置的多个第二梳齿,通过在第一可动梳齿电极与第一固定梳齿电极之间产生的静电力来驱动可动部;第二固定梳齿电极,其包括多个第三梳齿,并且设置于基部;和第二可动梳齿电极,其包括与多个第三梳齿交替配置的多个第四梳齿。该驱动方法包括在第一固定梳齿电极与第一可动梳齿电极之间施加驱动电压的驱动步骤,该驱动电压具有周期性地反复上升和下降的时间波形。在驱动步骤中,将包含成为除0v以外的恒定电压的期间的电压施加在第二固定梳齿电极与第二可动梳齿电极之间,将因第二固定梳齿电极与第二可动梳齿电极之间的电容的变化而在上述期间内从第二固定梳齿电极或第二可动梳齿电极输出的电流信号转换为电压信号,而生成表示电容的微分值的电容微分信号,并检测电容微分信号到达阈值的时刻,将该时刻与下降的时刻的关系控制成恒定。
16.发明效果
17.根据本公开,能够提供一种mems致动器、mems致动器的驱动方法和mems致动器控制程序,其能够与可动部的共振频率的变动无关地使驱动电压的频率接近该共振频率。
附图说明
18.图1是示出具备mems致动器的光学模块1a的结构的俯视图。
19.图2是沿图1的ii-ii线的截面图。
20.图3是图1所示的反射镜器件7的示意性截面图。
21.图4是图1所示的反射镜器件7的放大俯视图。
22.图5是概略地示出驱动部12的电路结构的图。
23.图6是用于说明从致动器驱动电路121输出的驱动电压的图。
24.图7是示出电流电压转换电路123的具体结构例的电路图。
25.图8是示出一个实施例中的各信号的时间变化的曲线图。
26.图9是示出另一个实施例中的各信号的时间变化的曲线图。
27.图10是示出再一个实施例中的各信号的时间变化的曲线图。
28.图11中,(a)部分、(b)部分和(c)部分是作为一个实施例分别示出驱动电压vin(t)、电容微分信号vout(t)和来自比较器124的输出电压vcom(t)的时间波形的实测数据的曲线图。
29.图12是示出电容微分信号vout(t)为0v的时刻和下降pd的时刻的时间差与驱动电压vin(t)的频率的关系的实测结果的曲线图。
30.图13是概念性地示出叠加在驱动电压上的纹波ri的图。
31.图14是示出第一变形例的电流电压转换电路123a的结构的电路图。
32.图15是示出在第一实施方式中电容ca不发生变化的情况下的、驱动电压vin(t)、电流信号j1、放大器123a的反相输入端子电压va、反馈电流j2以及电容微分信号vout(t)的时间波形的图。
33.图16是示出在第一变形例中电容ca不发生变化的情况下的、驱动电压vin(t)、电流信号j1、放大器123a的反相输入端子电压va、电流j3和j4、反馈电流j2以及电容微分信号vout(t)的时间波形的图。
34.图17中,(a)部分是示出本变形例的钳位电路125的电路图,(b)部分是示出设置在运算放大器的通常的保护电路126的电路图。
35.图18是示出第二变形例的电流电压转换电路123b的结构的电路图。
36.图19是对第二变形例的动作进行说明的图。(a)部分简化示出图18所示的电流电压转换电路123b。(b)部分是示出电流信号j1与电容微分信号vout的相关性的曲线图。
37.图20是对第二变形例的动作进行说明的图。(a)部分简化示出图18所示的电流电压转换电路123b。(b)部分是示出电流信号j1与电容微分信号vout的相关性的曲线图。
38.图21是对第二变形例的动作进行说明的图。(a)部分简化示出图18所示的电流电压转换电路123b。(b)部分是示出电流信号j1与电容微分信号vout的相关性的曲线图。
39.图22是关于第一变形例和第二变形例的模拟结果的曲线图。
40.图23是示出第三变形例的驱动部12a的结构的框图。
41.图24是示出第三变形例中的各信号的时间变化的曲线图。
42.图25是概略地示出第四变形例的反射镜器件所具备的时刻检测电路122a的结构的图。
43.图26是作为第二实施方式示出mems致动器1b的结构的框图。
44.图27是示意地示出梁91位于一个振动端时的梁91的变形状态的图。
45.图28中,(a)部分是示意地示出在第一固定梳齿电极83与可动梳齿电极82之间产生的电容c1,和在第二固定梳齿电极84与可动梳齿电极82之间产生的电容c2的图;(b)部分是示出与电容c1、c2连接的电流电压转换电路123的电路图。
46.图29是示出一个实施例中的各信号的时间变化的曲线图。
47.图30中,(a)部分是示出第一实施方式中的(vh)2与电容ca的变动幅度δc的关系的曲线图;(b)部分是示出第二实施方式中的(vh)2与电容c1、c2的变动幅度δc的关系的曲线图。
48.图31是示意地示出第一实施方式的固定梳齿电极16(18)和可动梳齿电极17(19)的图。
49.图32是作为比较例示出检测可动反射镜5的移位量的极大和/或极小的电路的图。
50.图33是示出包络检波器的典型例的电路图。
51.图34是示出图33所示的包络检波器的输入信号vi和输出信号vo的示例的曲线图。
52.图35是示出来自包络检波器的输出信号vo变得不能跟随输入信号vi的实际的包络h的状况的曲线图。
53.图36是示出在图32所示的比较例的电路中实测从运算电路204输出的信号sb的示例的曲线图。
具体实施方式
54.一个实施方式的第一mems致动器具备:基部与可动部,可动部被支承为相对于基部能够弹性移位;固定梳齿电极,其包括多个第一梳齿,并且设置于基部;可动梳齿电极,其包括与多个第一梳齿交替配置的多个第二梳齿,通过在可动梳齿电极与固定梳齿电极之间产生的静电力来驱动可动部;驱动电路,其在固定梳齿电极与可动梳齿电极之间施加驱动电压,该驱动电压具有周期性地反复上升和下降,并且包含在上升后且下降前成为恒定电压的期间的时间波形;和时刻检测电路,其将因固定梳齿电极与可动梳齿电极之间的电容的变化而在上述期间内从固定梳齿电极或可动梳齿电极输出的电流信号转换为电压信号,而生成表示电容的微分值的电容微分信号,并检测电容微分信号到达阈值的时刻。驱动电路将在时刻检测电路检测的时刻与下降的时刻的关系控制成恒定。
55.另外,一个实施方式的第一mems致动器的驱动方法是一种mems致动器的驱动方法,mems致动器具备:基部与可动部,可动部被支承为相对于基板能够弹性移位;固定梳齿电极,其包括多个第一梳齿,并且设置于基部;和可动梳齿电极,其包括与多个第一梳齿交替配置的多个第二梳齿,通过在可动梳齿电极与固定梳齿电极之间产生的静电力来驱动可动部。该驱动方法包括在固定梳齿电极与可动梳齿电极之间施加驱动电压的驱动步骤,该驱动电压具有周期性地反复上升和下降,并且包含在上升后且下降前成为恒定电压的期间的时间波形。在驱动步骤中,将因固定梳齿电极与可动梳齿电极之间的电容的变化而在上述期间内从固定梳齿电极或可动梳齿电极输出的电流信号转换为电压信号,而生成表示电容的微分值的电容微分信号,并检测电容微分信号到达阈值的时刻,将该时刻与下降的时刻的关系控制成恒定。
56.在该mems致动器和驱动方法中,在固定梳齿电极与可动梳齿电极之间施加具有周
期性地反复上升和下降的时间波形的驱动电压。从而,通过使驱动电压的频率接近可动部的共振频率,能够使可动部的振幅接近最大振幅。此时,由于固定梳齿电极与可动梳齿电极之间的电容的变化,而从固定梳齿电极或可动梳齿电极输出电流信号。在驱动电压的时间波形包含成为恒定电压(但是0v除外)期间的情况下,该期间内的电流信号表示固定梳齿电极与可动梳齿电极之间的电容的微分值。例如,在可动部通过振幅的中心时电容成为极大,该电流信号的电流值瞬时地为0。
57.在上述mems致动器和驱动方法中,驱动电压的时间波形包含在上升后且下降前成为恒定电压的期间。并且,将在该期间内从固定梳齿电极或可动梳齿电极输出的电流信号转换为电压信号,而生成表示电容的微分值的电容微分信号。进而,检测该电容微分信号到达阈值的时刻,将该时刻与下降的时刻的关系控制成恒定。由此,能够使驱动电压的下降时的可动部的位置恒定,因此,能够与可动部的共振频率的变动无关地使驱动电压的频率接近该共振频率。
58.也可以是,上述第一mems致动器还具备:钳位电路和/或软限幅器电路,其用于缩短因驱动电压的上升而引起的电容微分信号的变动期间。该情况下,能够缩短驱动电压的上升时的电容微分信号的变动期间,抑制电容微分信号到达阈值的时刻的检测被该变动妨碍。
59.另一个实施方式的第二mems致动器具备:基部与可动部,可动部被支承为相对于基部能够弹性移位;第一固定梳齿电极,其包括多个第一梳齿,并且设置于基部;第一可动梳齿电极,其包括与多个第一梳齿交替配置的多个第二梳齿,通过在第一可动梳齿电极与第一固定梳齿电极之间产生的静电力来驱动可动部;第二固定梳齿电极,其包括多个第三梳齿,并且设置于基部;第二可动梳齿电极,其包括与多个第三梳齿交替配置的多个第四梳齿;驱动电路,其在第一固定梳齿电极与第一可动梳齿电极之间施加驱动电压,该驱动电压具有周期性地反复上升和下降的时间波形;和时刻检测电路,其将包含成为除0v以外的恒定电压的期间的电压施加在第二固定梳齿电极与第二可动梳齿电极之间,将因第二固定梳齿电极与第二可动梳齿电极之间的电容的变化而在上述期间内从第二固定梳齿电极或第二可动梳齿电极输出的电流信号转换为电压信号,而生成表示电容的微分值的电容微分信号,并检测电容微分信号到达阈值的时刻。驱动电路将在时刻检测电路检测的时刻与下降的时刻的关系控制成恒定。
60.另外,另一个实施方式的第二mems致动器的驱动方法是一种mems致动器的驱动方法,mems致动器具备:基部与可动部,可动部被支承为相对于基部能够弹性移位;第一固定梳齿电极,其包括多个第一梳齿,并且设置于基部;第一可动梳齿电极,其包括与多个第一梳齿交替配置的多个第二梳齿,通过在第一可动梳齿电极与第一固定梳齿电极之间产生的静电力来驱动可动部;第二固定梳齿电极,其包括多个第三梳齿,并且设置于基部;和第二可动梳齿电极,其包括与多个第三梳齿交替配置的多个第四梳齿。该驱动方法包括在第一固定梳齿电极与第一可动梳齿电极之间施加驱动电压的驱动步骤,该驱动电压具有周期性地反复上升和下降的时间波形。在驱动步骤中,将包含成为除0v以外的恒定电压的期间的电压施加在第二固定梳齿电极与第二可动梳齿电极之间,将因第二固定梳齿电极与第二可动梳齿电极之间的电容的变化而在上述期间内从第二固定梳齿电极或第二可动梳齿电极输出的电流信号转换为电压信号,而生成表示电容的微分值的电容微分信号,并检测电容
微分信号到达阈值的时刻,将该时刻与下降的时刻的关系控制成恒定。
61.在该mems致动器和驱动方法中,在第一固定梳齿电极与第一可动梳齿电极之间施加具有周期性地反复上升和下降的时间波形的驱动电压。从而,通过使驱动电压的频率接近可动部的共振频率,能够使可动部的振幅接近最大振幅。此时,由于第二可动梳齿电极同样与可动部一起移位,因此,由于第二固定梳齿电极与第二可动梳齿电极之间的电容的变化而从第二固定梳齿电极或第二可动梳齿电极会输出电流信号。当将包含成为除0v以外的恒定电压的期间的电压施加在第二固定梳齿电极与第二可动梳齿电极之间时,该期间内的电流信号表示第二固定梳齿电极与第二可动梳齿电极之间的电容的微分值。例如,在可动部通过振幅的中心时电容成为极大,该电流信号的电流值瞬时地为0。
62.在上述mems致动器和驱动方法中,将包含成为除0v以外的恒定电压的期间的电压施加在第二固定梳齿电极与第二可动梳齿电极之间。并且,将在该期间内从第二固定梳齿电极或第二可动梳齿电极输出的电流信号转换为电压信号,而生成表示电容的微分值的电容微分信号。进而,检测该电容微分信号到达阈值的时刻,并将该时刻与下降的时刻的关系控制成恒定。由此,能够使驱动电压的下降时的可动部的位置恒定,因此,能够与可动部的共振频率的变动无关地使驱动电压的频率接近该共振频率。
63.在上述第二mems致动器中,也可以是,第二可动梳齿电极与可动部的距离比第一可动梳齿电极与可动部的距离短。该情况下,能够进一步增大第二可动梳齿电极的振幅,提高电容微分信号到达阈值的时刻的检测精度。
64.在上述第一和第二mems致动器中,也可以是,驱动电路使下降的时刻与电容微分信号到达阈值的时刻一致。同样地,在上述第一和第二驱动方法的驱动步骤中,也可以是,使下降的时刻与电容微分信号到达阈值的时刻一致。例如由此,能够将电容微分信号到达阈值的时刻与下降的时刻的关系控制成恒定。
65.在上述第一和第二mems致动器中,也可以是,驱动电路使下降的时刻从电容微分信号到达阈值的时刻以一定时间的量向后错开。同样地,在上述第一和第二驱动方法的驱动步骤中,也可以是,使下降的时刻从电容微分信号到达阈值的时刻以一定时间的量向后错开。例如由此,能够将电容微分信号到达阈值的时刻与下降的时刻的关系控制成恒定。并且,能够确认:在驱动电压下降(即电容微分信号消失)前,电容微分信号到达了阈值,因此,能够更加可靠地检测电容微分信号到达阈值的时刻。
66.在上述第一和第二mems致动器中,也可以是,阈值是相当于电流信号为0的情况的值。同样地,在上述第一和第二驱动方法中,也可以是,将阈值设为相当于电流信号为0情况的值。该情况下,能够高精度地检测可动梳齿电极与固定梳齿电极最靠近的时刻(在一个实施例中,是适于驱动电压的下降的时刻)。
67.在上述第一和第二mems致动器中,也可以是,驱动电压的时间波形周期性地包含具有上升和下降的矩形波,驱动电压的占空比为20%以上且小于50%。同样地,在上述第一和第二驱动方法中,也可以是,将驱动电压的时间波形设为周期性地包含具有上升和下降的矩形波的时间波形,将驱动电压的占空比设为20%以上且小于50%。假设将驱动电压的占空比设为50%,则有可能因控制误差等而在可动梳齿电极与固定梳齿电极向彼此分离的方向移动的时刻施加静电引力,引起可动部的振幅减小。通过将驱动电压的占空比设为小于50%,能够降低这样的风险。另外,通过将驱动电压的占空比设为20%以上,能够使足够
的静电引力作用在可动梳齿电极与固定梳齿电极之间。
68.在上述第一和第二mems致动器中,也可以是,时刻检测电路包括对电容微分信号与阈值进行比较的比较器。同样地,在上述第一和第二驱动方法的驱动步骤中,也可以是,使用比较器进行电容微分信号与阈值的比较。该情况下,能够通过简单的电路进行电容微分信号到达阈值的时刻的检测,因此,能够有助于mems致动器的小型化和低成本化。
69.在上述第一和第二mems致动器中,也可以是,时刻检测电路包括将电流信号转换为电压信号的跨阻抗放大器。同样地,在上述第一和第二驱动方法的驱动步骤中,也可以是,使用跨阻抗放大器将电流信号转换为电压信号。该情况下,例如与将电阻(分压电阻)与固定梳齿电极或可动梳齿电极串联连接,并利用该电阻上的压降来将电流信号转换为电压信号的情况相比,能够降低梳齿电极间的电压的变动,在梳齿电极间高精度地施加期望的电压。
70.也可以是,上述第一和第二mems致动器还具备进行电容微分信号的时间积分的积分电路。通过进行电容微分信号的时间积分,能够容易地检测某个期间的可动部的移位量。
71.也可以是,上述第一和第二mems致动器具备上下振动方式的可动部。在上下振动方式下对可动部设置可动梳齿电极的情况下,将可动梳齿电极设置在可动部的任意位置,增大的惯性矩均是恒定的,共振频率的降低量也恒定。从而,能够增多梳齿的数量,能够得到较大的电容值。另外,在上下振动方式下,在电容值变为最大的时刻(电容微分值为0的时刻),可动部的速度变为最快,因此,电容微分值的时间变化也增大。根据以上说明,在上下振动方式下,能够得到较高的时刻检测精度,能够比较容易地使可动部通过规定位置的时刻与驱动信号的下降时刻一致。
72.也可以是,上述第一和第二mems致动器具备滑动方式的可动部。即使在该情况下,也能够适宜地实现上述第一和第二mems致动器的效果。
73.一个实施方式的第一mems致动器控制程序,是用于使计算机执行用于控制上述任意mems致动器的驱动电路的处理的程序,一边将在时刻检测电路检测的时刻与下降的时刻的关系控制成恒定,一边控制从驱动电路输出的驱动电压的上升时刻和下降时刻。另外,一个实施方式的第二mems致动器控制程序,是用于使计算机执行用于实现上述任意驱动方法中的驱动步骤的处理的程序,一边将电容微分信号到达阈值的时刻与下降的时刻的关系控制成恒定,一边控制驱动电压的上升时刻和下降时刻。
74.以下,一边参照附图一边说明本公开的mems致动器、mems致动器的驱动方法和mems致动器控制程序的具体例。此外,本发明并不限定于这些示例而是由要求保护的范围表示,包括与要求保护的范围等同的含义和范围内的所有改变。在以下的说明中,在附图的说明中对于相同要素标注相同标记并省略重复说明。
75.(第一实施方式)
76.图1是示出具有mems致动器的光学模块1a的结构的俯视图。图2是沿图1的ii-ii线的截面图。光学模块1a例如可用于傅立叶变换红外分光光度计(ftir:fourier transform infrared spectrometer)等光学装置。如图1和图2所示,本实施方式的光学模块1a包括:反射镜单元(mirror uint)2、和用于容纳反射镜单元2的封装件(package)3。封装件3具有支承体31。反射镜单元2配置在支承体31的z轴方向上的一侧,例如通过粘接剂而安装于支承体31。支承体31例如由钨铜形成,例如呈矩形板状。反射镜单元2包括沿z轴方向移动的可动
反射镜5和位置固定的固定反射镜6。在光学模块1a中,可通过未图示的分束器单元、可动反射镜5和固定反射镜6来构成干涉光学系统。干涉光学系统例如是麦克尔逊干涉光学系统。
77.反射镜单元2具有:固定反射镜6、反射镜器件7、光学功能构件8和应力缓冲基板9。反射镜器件7是本实施方式的mems致动器的示例,包括基底11(基部)、可动反射镜5(可动部)和驱动部12。
78.基底11具有主面11a和与主面11a为相反侧的背面11b。基底11例如呈矩形板状,其平面形状的大小例如是短边方向为10mm、长边方向为15mm。基底11的厚度例如为0.35mm。可动反射镜5具有:反射镜面5a、和配置有反射镜面5a的反射镜支承部5b。可动反射镜5是上下振动方式的可动部,以能够沿与主面11a垂直的z轴方向移位的方式,被弹性地支承于基底11。驱动部12产生用于使可动反射镜5沿z轴方向移位的驱动力。
79.在反射镜器件7,设置有一对光通过部7a、7b。一对光通过部7a、7b配置在可动反射镜5的x轴方向上的两侧。
80.在此,参照图2、图3和图4,对反射镜器件7的结构进行详细说明。图3是图1所示的反射镜器件7的示意性截面图。在图3中,以z轴方向上的尺寸相比实际情况放大的状态示意地示出反射镜器件7。图4是图1所示的反射镜器件7的放大俯视图。
81.基底11、可动反射镜5的反射镜支承部5b以及驱动部12由soi(silicon on insulator,绝缘体上硅)基板20构成。反射镜器件7例如形成为矩形板状。soi基板20具有支承层21、器件层22和中间层23。支承层21和器件层22是硅层。中间层23是配置在支承层21与器件层22之间的绝缘层。soi基板20,从z轴方向上的一侧起依次具有支承层21、中间层23和器件层22。
82.基底11由支承层21、器件层22以及中间层23的一部分构成。基底11的主面11a是支承层21的与中间层23相反的一侧的表面。基底11的背面11b是器件层22的与中间层23为相反侧的表面。构成基底11的支承层21比构成基底11的器件层22厚。构成基底11的支承层21的厚度例如是构成基底11的器件层22的厚度的4倍的程度。在反射镜单元2中,如图2所示,基底11的背面11b与光学功能构件8的表面8a彼此接合。
83.可动反射镜5以轴线r1与轴线r2的交点为中心位置(重心位置)配置。轴线r1是沿x轴方向延伸的直线。轴线r2是沿y轴方向延伸的直线。从z轴方向观察,反射镜器件7呈关于轴线r1和轴线r2中的各个大致轴对称的形状。可动反射镜5的反射镜支承部5b具有:配置部51、框部52、一对连结部53和梁部54。配置部51、框部52和一对连结部53由器件层22的一部分构成。配置部51从z轴方向观察呈圆形状。在配置部51的z轴方向上的一侧的表面51a上设置有金属膜,该金属膜的表面为反射镜面5a。反射镜面5a与z轴方向垂直地延伸,呈圆形状。配置部51的表面51a是器件层22的中间层23一侧的表面。
84.框部52,从z轴方向观察圆环状地延伸,以从配置部51隔开间隔的方式包围配置部51。一对连结部53各自将配置部51和框部52彼此连结。一对连结部53配置在配置部51的y轴方向上的两侧。
85.梁部54由配置在器件层22上的支承层21和中间层23构成。梁部54具有:内侧梁部54a、外侧梁部54b和一对连结梁部54c。内侧梁部54a配置在配置部51的z轴方向的一侧的表面上。从z轴方向观察,内侧梁部54a包围反射镜面5a。外侧梁部54b配置在框部52的z轴方向的一侧的表面上。从z轴方向观察,外侧梁部54b包围内侧梁部54a,进而包围反射镜面5a。一
对连结梁部54c分别配置在一对连结部53的z轴方向的一侧的表面上。各连结梁部54c将内侧梁部54a与外侧梁部54b彼此连结。
86.驱动部12具有:第一弹性支承部13、第二弹性支承部14和致动器部15。第一弹性支承部13、第二弹性支承部14和致动器部15由器件层22的一部分构成。
87.第一弹性支承部13和第二弹性支承部14各自连接在基底11与可动反射镜5之间。第一弹性支承部13和第二弹性支承部14,以可动反射镜5(反射镜支承部5b)能够沿z轴方向(与反射镜面5a交叉的方向)移位的方式,弹性地支承可动反射镜5。
88.第一弹性支承部13具有一对杆131、第一连接(link)构件132、第二连接构件133、中间构件134、一对第一扭杆135、一对第二扭杆136、一对非线性缓冲弹簧137和多个电极支承部138。
89.一对杆131配置在光通过部7a的y轴方向上的两侧,在y轴方向上彼此面对。各杆131呈沿着与z轴方向垂直的平面延伸的板状。第一连接构件132架设在一对杆131的与可动反射镜5为相反侧的端部间。第一连接构件132呈沿着与z轴方向垂直的平面延伸的板状,且沿y轴方向延伸。第二连接构件133架设在一对杆131的可动反射镜5侧的端部间。第二连接构件133呈沿着与z轴方向垂直的平面延伸的板状,且沿y轴方向延伸。
90.一对杆131、第一连接构件132和第二连接构件133划定光通过部7a。光通过部7a例如是空洞(孔)。或者,也可以在光通过部7a内配置有具有光透过性的材料。
91.中间构件134呈沿着与z轴方向垂直的平面延伸的板状,且沿y轴方向延伸。中间构件134配置在可动反射镜5与第二连接构件133之间(换言之,可动反射镜5与光通过部7a之间)。中间构件134如后所述,经由非线性缓冲弹簧137与可动反射镜5连接。
92.一对第一扭杆135分别架设在一个杆131的一方的端部与基底11之间,以及另一个杆131的一方的端部与基底11之间。即,一对第一扭杆135分别连接在一对杆131与基底11之间。各第一扭杆135沿y轴方向延伸。一对第一扭杆135配置在与y轴方向平行的同一中心线上。
93.一对第二扭杆136分别架设在一个杆131的另一方的端部与中间构件134的一端之间,以及另一个杆131的另一方的端部与中间构件134的另一端之间。即,一对第二扭杆136分别连接在一对杆131与可动反射镜5之间。各第二扭杆136沿y轴方向延伸。一对第二扭杆136配置在与y轴方向平行的同一中心线上。
94.一对非线性缓冲弹簧137连接在可动反射镜5与中间构件134之间。即,一对非线性缓冲弹簧137连接在可动反射镜5与第二扭杆136之间。从z轴方向观察,各非线性缓冲弹簧137蜿蜒地延伸。各非线性缓冲弹簧137的一端与中间构件134连接,各非线性缓冲弹簧137的另一端与框部52连接。非线性缓冲弹簧137构成为,在可动反射镜5沿z轴方向移位了的状态下,非线性缓冲弹簧137的绕y轴方向的变形量小于第一扭杆135和第二扭杆136各自的绕y轴方向的变形量,并且非线性缓冲弹簧137的x轴方向上的变形量大于第一扭杆135和第二扭杆136各自的x轴方向上的变形量。由此,能够抑制第一扭杆135和第二扭杆136的扭转变形的非线性,能够抑制因该非线性导致的可动反射镜5的控制特性的降低。
95.多个电极支承部138包括:一对第一电极支承部138a、一对第二电极支承部138b和一对第三电极支承部138c。各电极支承部138a、138b、138c呈沿着与z轴方向垂直的平面延伸的板状,且沿y轴方向延伸。各电极支承部138a、138b、138c从杆131朝向光通过部7a的相
反侧延伸。一对第一电极支承部138a配置在与y轴方向平行的同一中心线上。一对第二电极支承部138b配置在与y轴方向平行的同一中心线上。一对第三电极支承部138c配置在与y轴方向平行的同一中心线上。在x轴方向上,第一电极支承部138a、第二电极支承部138b和第三电极支承部138c从可动反射镜5侧依次地排列配置。
96.第二弹性支承部14具有一对杆141、第一连接构件142、第二连接构件143、中间构件144、一对第一扭杆145、一对第二扭杆146、一对非线性缓冲弹簧147和多个电极支承部148。
97.一对杆141配置在光通过部7b的y轴方向上的两侧,在y轴方向上彼此面对。各杆141呈沿着与z轴方向垂直的平面延伸的板状。第一连接构件142架设在一对杆141的与可动反射镜5为相反侧的端部间。第一连接构件142呈沿着与z轴方向垂直的平面延伸的板状,且沿y轴方向延伸。第二连接构件143架设在一对杆141的可动反射镜5一侧的端部间。第二连接构件143呈沿着与z轴方向垂直的平面延伸的板状,且沿y轴方向延伸。
98.一对杆141、第一连接构件142和第二连接构件143划定光通过部7b。光通过部7b例如是空洞(孔)。或者,也可以在光通过部7b内配置有具有光透过性的材料。
99.中间构件144呈沿着与z轴方向垂直的平面延伸的板状,且沿y轴方向延伸。中间构件144配置在可动反射镜5与第二连接构件143之间(换言之,可动反射镜5与光通过部7b之间)。中间构件144如后所述,经由非线性缓冲弹簧147与可动反射镜5连接。
100.一对第一扭杆145分别架设在一个杆141的一方的端部与基底11之间,以及另一个杆141的一方的端部与基底11之间。即,一对第一扭杆145分别连接在一对杆141与基底11之间。各第一扭杆145沿y轴方向延伸。一对第一扭杆145配置在与y轴方向平行的同一中心线上。
101.一对第二扭杆146分别架设在一个杆141的另一方的端部与中间构件144的一端之间,以及另一个杆141的另一方的端部与中间构件144的另一端之间。即,一对第二扭杆146分别连接在一对杆141与可动反射镜5之间。各第二扭杆146沿y轴方向延伸。一对第二扭杆146配置在与y轴方向平行的同一中心线上。
102.一对非线性缓冲弹簧147连接在可动反射镜5与中间构件144之间。即,一对非线性缓冲弹簧147连接在可动反射镜5与第二扭杆146之间。从z轴方向观察,各非线性缓冲弹簧147蜿蜒地延伸。各非线性缓冲弹簧147的一端与中间构件144连接,各非线性缓冲弹簧147的另一端与框部52连接。非线性缓冲弹簧147构成为,在可动反射镜5沿z轴方向移位了的状态下,非线性缓冲弹簧147的绕y轴方向的变形量小于第一扭杆145和第二扭杆146各自的绕y轴方向的变形量,并且非线性缓冲弹簧147的x轴方向上的变形量大于第一扭杆145和第二扭杆146各自的x轴方向上的变形量。由此,能够抑制第一扭杆145和第二扭杆146的扭转变形的非线性,能够抑制因该非线性导致的可动反射镜5的控制特性的降低。
103.多个电极支承部148包括:一对第一电极支承部148a、一对第二电极支承部148b和一对第三电极支承部148c。各电极支承部148a、148b、148c呈沿着与z轴方向垂直的平面延伸的板状,且沿y轴方向延伸。各电极支承部148a、148b、148c从杆141朝向光通过部7b的相反侧延伸。一对第一电极支承部148a配置在与y轴方向平行的同一中心线上。一对第二电极支承部148b配置在与y轴方向平行的同一中心线上。一对第三电极支承部148c配置在与y轴方向平行的同一中心线上。在x轴方向上,第一电极支承部148a、第二电极支承部148b和第
三电极支承部148c从可动反射镜5侧依次地排列配置。
104.致动器部15产生用于使可动反射镜5沿z轴方向移位的驱动力。致动器部15具有:固定梳齿电极16和18、以及可动梳齿电极17和19。固定梳齿电极16、18设置于基底11,固定梳齿电极16、18的位置通过基底11固定。可动梳齿电极17、19分别与电极支承部138、148连接,设置成分别能够相对于固定梳齿电极16、18在z方向上相对地移位。
105.更详细而言,固定梳齿电极16设置在基底11的器件层22的面向电极支承部138的表面的一部分。固定梳齿电极16具有:沿着与y轴方向垂直的平面延伸的多个固定梳齿(第一梳齿)16a。这些固定梳齿16a配置成在y轴方向上隔着规定的间隔地排列。可动梳齿电极17设置在各电极支承部138的可动反射镜5侧的表面。可动梳齿电极17具有:沿着与y轴方向垂直的平面延伸的多个可动梳齿(第二梳齿)17a。这些可动梳齿17a配置成在y轴方向上隔着规定的间隔地排列。
106.在固定梳齿电极16和可动梳齿电极17,多个固定梳齿16a与多个可动梳齿17a交替地配置。即,固定梳齿电极16的各固定梳齿16a位于可动梳齿电极17的可动梳齿17a之间。相邻的固定梳齿16a与可动梳齿17a在y轴方向上彼此面对。相邻的固定梳齿16a与可动梳齿17a之间的距离例如为数μm的程度。
107.固定梳齿电极18设置在基底11的器件层22的面向电极支承部148的表面的一部分。固定梳齿电极18具有:沿着与y轴方向垂直的平面延伸的多个固定梳齿(第一梳齿)18a。这些固定梳齿18a配置成在y轴方向上隔着规定的间隔地排列。可动梳齿电极19设置在各电极支承部148的可动反射镜5侧的表面。可动梳齿电极19具有:沿着与y轴方向垂直的平面延伸的多个可动梳齿(第二梳齿)19a。这些可动梳齿19a配置成在y轴方向上隔着规定的间隔地排列。
108.在固定梳齿电极18和可动梳齿电极19,多个固定梳齿18a与多个可动梳齿19a交替地配置。即,固定梳齿电极18的各固定梳齿18a位于可动梳齿电极19的可动梳齿19a之间。相邻的固定梳齿18a与可动梳齿19a在y轴方向上彼此面对。相邻的固定梳齿18a与可动梳齿19a之间的距离例如为数μm的程度。
109.如图1所示,在基底11设置有多个电极焊盘(pad)71。各电极焊盘71,在以到达器件层22的方式形成于基底11的主面11a的开口内,配置在器件层22的表面上。多个电极焊盘71中的几个经由器件层22与固定梳齿电极16或固定梳齿电极18电连接。多个电极焊盘71中的其他几个经由第一弹性支承部13和或第二弹性支承部14与可动梳齿电极17或可动梳齿电极19电连接。另外,在基底11设置有用作接地电极的一对电极焊盘72。一对电极焊盘72以位于可动反射镜5的y轴方向上的两侧的方式,配置在主面11a上。
110.在具备以上结构的反射镜器件7,用于使可动反射镜5沿z轴方向移位的驱动电压经由引脚(lead pin)33输入驱动部12。由此,例如,以可动反射镜5向z轴方向上的一侧移位的方式,在彼此面对的固定梳齿电极16与可动梳齿电极17之间、以及彼此面对的固定梳齿电极18与可动梳齿电极19之间产生静电力。此时,在第一弹性支承部13和第二弹性支承部14,第一扭杆135、145和第二扭杆136、146发生扭转,在第一弹性支承部13和第二弹性支承部14产生弹性力。在反射镜器件7,通过对驱动部12施加周期性的驱动电压,来驱动可动反射镜5沿z轴方向以其共振频率往复运动。这样,驱动部12作为静电致动器而发挥功能。
111.再次参照图2。光学功能构件8具有:与基底11的背面11b相对的表面8a、和与表面
8a为相反侧的背面8b。光学功能构件8由具有光透过性的材料一体地形成。光学功能构件8例如由玻璃形成为矩形板状,例如具有宽15mm、长20mm、厚4mm的程度的尺寸。另外,光学功能构件8的材料,以例如在光学模块1a的敏感波长为近红外区域的情况下为玻璃,在光学模块1a的敏感波长为中红外区域的情况下为硅的方式,根据光学模块1a的敏感波长来选择。光学功能构件8用于补偿在可动反射镜5上入射出射的光与在固定反射镜6上入射出射的光之间产生的光程差。光学功能构件8的表面8a通过直接接合(direct bonding)(例如,等离子体活化接合(plasma activation bonding)、表面活化接合(surface-activated bonding)、原子扩散接合(atomic diffusion bonding)、阳极接合(anodic bonding)、熔融接合(fusion bonding)、亲水接合(hydrophilic bonding)等)而与基底11的背面11b接合。
112.固定反射镜6相对于光学功能构件8配置在反射镜器件7的相反侧,固定反射镜6相对于反射镜器件7的基底11的位置是固定的。固定反射镜6例如通过蒸镀而形成在光学功能构件8的背面8b。固定反射镜6具有与z轴方向垂直的反射镜面6a。在本实施方式中,可动反射镜5的反射镜面5a和固定反射镜6的反射镜面6a朝向z轴方向上的一侧。固定反射镜6将透过光学功能构件8的光反射。
113.应力缓冲基板9隔着固定反射镜6安装在光学功能构件8的背面8b。应力缓冲基板9例如通过粘接剂安装在固定反射镜6。应力缓冲基板9的热膨胀系数比光学功能构件8的热膨胀系数更接近基底11的热膨胀系数(更具体地,支承层21的热膨胀系数)。另外,应力缓冲基板9的厚度比光学功能构件8的厚度更接近基底11的厚度。应力缓冲基板9例如由硅形成为矩形板状,例如具有宽16mm、长21mm、厚0.65mm的程度的尺寸。
114.如图1和图2所示,封装件3具有:支承体31、多个引脚33、框体34和光透过构件35。框体34,以从z轴方向观察包围反射镜单元2的方式形成,例如通过银焊料等粘接剂安装在支承体31的表面31a。框体34例如由陶瓷形成,例如呈矩形框状。框体34的与支承体31为相反侧的端面34a,关于包含基底11的主面11a的虚拟平面位于支承体31的相反侧。
115.光透过构件35以将框体34的开口封闭的方式形成,例如通过粘接剂安装在框体34的端面34a。光透过构件35由具有光透过性的材料形成,例如呈矩形板状。在此,由于框体34的端面34a关于包含基底11的主面11a的虚拟平面位于支承体31的相反侧,因此,光透过构件35与反射镜器件7分离。由此,在光学模块1a中,当可动反射镜5沿z轴方向往复移动时,能够防止可动反射镜5和驱动部12与光透过构件35接触。
116.各引脚33以一端部33a位于框体34的内侧而另一端(未图示)位于框体34的外侧的方式,设置于框体34。引脚33的一端部33a在反射镜器件7经由引线(未图示)与对应于该引脚33的电极焊盘71、72电连接。在光学模块1a中,用于使可动反射镜5沿z轴方向移位的驱动电压经由多个引脚33输入驱动部12。本实施方式中,在框体34形成有在光学功能构件8的y轴方向上的两侧沿x轴方向延伸的台阶面34b,各引脚33的一端部33a配置于台阶面34b。各引脚33在支承体31的y轴方向上的两侧沿z轴方向延伸,各引脚33的另一端部位于相比支承体31更靠z轴方向的下侧。
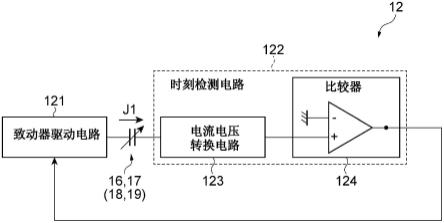
117.接着,进一步说明驱动部12。图5是概略地示出驱动部12的电路结构的图。如该图所示,驱动部12具有:致动器驱动电路121和时刻检测电路122。另外,在图5中,通过可变电容符号近似地示出固定梳齿电极16、18与可动梳齿电极17、19之间的电容。
118.致动器驱动电路121是本实施方式的驱动电路的示例。致动器驱动电路121在上述
的固定梳齿电极16与可动梳齿电极17之间以及固定梳齿电极18与可动梳齿电极19之间施加驱动电压。致动器驱动电路121例如具有:包括fpga(field-programmable gate array)等集成电路的信号处理部;与该信号处理部电连接的、包括eeprom(electrically erasable programmable read-only memory)等非易失性存储器的存储部;以及与该信号处理部电连接的高压产生电路。高压产生电路基于来自信号处理部的驱动信号生成驱动电压。高压产生电路例如是hvic(high voltage ic)。
119.图6是用于说明从致动器驱动电路121输出的驱动电压的图。在图6中,示出:表示可动反射镜5的位置的时间变化的曲线图g1、和表示驱动电压的时间波形的曲线图g2。曲线图g1、g2的横轴表示时间。曲线图g1的纵轴表示可动反射镜5在z方向上的位置,曲线图g2的纵轴表示电压的大小。而且,图6还一并示出:表示多个时刻t1~t4的固定梳齿电极16(18)与可动梳齿电极17(19)的相对位置关系的图a~图d。致动器驱动电路121如图6所示,生成具有可动反射镜5的共振频率的2倍的值的频率的驱动电压。驱动电压是以一定周期反复上升和下降的连续脉冲信号,在本实施方式中,例如是占空比(duty)为20%以上且小于50%的矩形波。
120.驱动电压的上升的时刻控制成,与成为可动反射镜5的位置的时间变化中的、相当于折返点的极大点和极小点的时刻一致,或稍微延迟。此外,驱动电压的下降的时刻控制成,与成为可动反射镜5的极大点与极小点之间的中点的时刻一致,或稍微延迟。另外,在图6中,实线箭头是可动反射镜5的移动方向,虚线箭头是对可动反射镜5施加的驱动力的方向。另外,标注了阴影线的固定梳齿电极16(18)表示施加了电压的状态,未标注阴影线的固定梳齿电极16(18)表示未施加电压的状态。
121.此外,驱动电压的频率与可动反射镜5的振幅的关系能够通过实际地使反射镜器件7动作来取得。或者,驱动电压的频率与可动反射镜5的振幅的关系也可以通过例如龙格库塔法等数值分析来预测。
122.再次参照图5。时刻检测电路122是设置为用于检测在可动反射镜5的位置的时间变化(图6的曲线图g1)中,可动反射镜5的移位为0(即,可动反射镜5的位置为极大点与极小点的中点)的时刻。另外,在可动反射镜5的移位为0时,固定梳齿电极16(18)最靠近可动梳齿电极17(19)。致动器驱动电路121通过将在时刻检测电路122检测的时刻与驱动电压的下降时刻的关系控制成恒定,来使驱动电压的频率接近可动反射镜5的共振频率(优选使之一致)。
123.时刻检测电路122与固定梳齿电极16(18)和可动梳齿电极17(19)中的一个电连接。时刻检测电路122具有:电流电压转换电路123和比较器124。电流电压转换电路123将从固定梳齿电极16(18)或可动梳齿电极17(19)输出的电流信号转换为电压信号。电流电压转换电路123的信号输出端与比较器124的信号输入端电连接。比较器124对从电流电压转换电路123输出的电压信号与规定的阈值(图中为0v)进行比较,输出表示其比较结果的信号。
124.比较器124的信号输出端与致动器驱动电路121电连接。致动器驱动电路121基于来自比较器124的输出信号,将可动反射镜5的移位为0的时刻与驱动电压的下降时刻的关系控制成恒定。
125.致动器驱动电路121的控制例如由设置在光学模块1a的外部的计算机进行。该计算机具有中央运算处理装置(cpu)、易失性存储器(ram)、以及非易失性存储器(rom),通过
执行预先存储在rom的程序来进行致动器驱动电路121的控制。程序,一边将在时刻检测电路122检测的可动反射镜5的移位为0时刻与驱动电压的下降时刻的关系控制成恒定,一边控制从致动器驱动电路121输出的驱动电压的上升时刻和下降时刻。
126.图7是示出电流电压转换电路123的具体结构例的电路图。如图7所示,电流电压转换电路123例如由包括放大器123a和反馈电阻123b的跨阻放大器(trans-impedance amplifier:tia)构成。并且,固定梳齿电极16(18)和可动梳齿电极17(19)中的一个与放大器123a的负侧端子电连接。
127.当可动反射镜5移位时,固定梳齿电极16(18)与可动梳齿电极17(19)之间的电容(capacity)发生变化。并且,由于该变化,从固定梳齿电极16(18)和可动梳齿电极17(19)输出电流信号j1。在驱动电压的时间波形包含成为恒定电压(但是0v除外)期间的情况下,该期间内的电流信号j1表示固定梳齿电极16(18)与可动梳齿电极17(19)之间的电容的微分值。例如,在可动反射镜5通过振幅的中心时,该电流信号j1的大小(电流值)瞬时地为0。使用这一点,能够适宜地检测可动反射镜5通过极大点与极小点的中点的时刻。
128.更具体地进行说明。现在,设:将在上升与下降之间具有电压恒定的期间的驱动电压(例如图6所示的矩形波)输入固定梳齿电极16(18)和可动梳齿电极17(19)中的另一个。即,驱动电压vin(t)由下式(1)表示。v
l
是矩形波的低压侧的电压值,vh是矩形波的高压侧的电压值,t是时间。
129.vin(t)=vhor v
l
…
(1)
130.另外,从固定梳齿电极16(18)和可动梳齿电极17(19)中的一个输出的电流信号j1由下述式(2)表示。q是积累在固定梳齿电极16(18)与可动梳齿电极17(19)间的电容的电荷量。ca是固定梳齿电极16(18)与可动梳齿电极17(19)间的电容值。
[0131][0132]
在vin(t)的大小为恒定值的期间中,vin(t)的时间微分值为0,因此为下述式(3)。
[0133][0134]
在此,tia的反馈电流j2与输出电压vout(t)的关系如下述式(4)所示。rf是反馈电阻123b的电阻值。
[0135][0136]
另外,在放大器123a的输入端子有下述条件成立。
[0137]
j1 j2=0
…
(5)
[0138]
从而,来自tia的输出电压vout(t)表示为下述式(6)。
[0139][0140]
即,如果驱动电压vin(t)是不为0的恒定值,则在输出电压vout(t)为0时,dca(t)/dt为0,ca(t)取极值(极大值或极小值)。即,能够适宜地检测可动反射镜5通过极大点与极小点的中点的时刻。另外,例如在图6所示的曲线图g2那样v
l
=0的情况下,仅能够在驱动电压vin(t)为vh的期间检测上述时刻。在驱动电压vin(t)为v
l
(=0)的期间,输出电压vout(t)
如上述式(6)所示,无论dca(t)/dt如何均为0v。
[0141]
另外,在一个实施例中,可动反射镜5的共振频率为500hz。该情况下,驱动电压vin(t)的频率为1khz,驱动电压vin(t)的周期为1ms。如果将该周期设为上述的dt,dca设为例如10pf、vh设为例如100v,则能够计算出j1=1μa。在将输出电压vout(t)的范围设为1v时,必要的反馈电阻123b的电阻值rf为1mω。
[0142]
图8是示出一个实施例中的各信号的时间变化的曲线图。在该图中,自上依次示出驱动电压vin(t)、可动反射镜5的移位量z(t)、电容ca(t)、输出电压vout(t)、和来自比较器124的输出电压波形vcom(t)。另外,各曲线图的纵轴表示电压或电容,各曲线图的横轴表示时间。
[0143]
如前所述,驱动电压vin(t)具有以一定周期交替反复上升pu和下降pd的时间波形。在图8所示的例子中,占空比为50%,从上升pu到下降pd的期间(电压值vh)的长度与从下降pd到上升pu的期间(电压值v
l
)的长度彼此相等。并且,驱动电压vin(t)的上升pu的时刻,以与可动反射镜5的移位量z(t)为往复运动的折返点即极大点za或极小点zb的时刻一致的方式,由致动器驱动电路121进行控制。另外,驱动电压vin(t)的下降pd的时刻,以与可动反射镜5通过极大点za与极小点zb的中点zc的时刻一致的方式,由致动器驱动电路121进行控制。
[0144]
固定梳齿电极16(18)与可动梳齿电极17(19)之间的电容ca(t)根据可动反射镜5的移位量z(t)而变化,在移位量z(t)为极大点za或极小点zb的时刻为极小,在移位量z(t)通过极大点za与极小点zb的中点zc的时刻为极大。另外,来自电流电压转换电路123的输出电压vout(t)如前所述,在驱动电压vin(t)为v
l
(=0v)的期间为0v,在驱动电压vin(t)为除0以外的恒定值vh的期间,具有表示电容ca(t)的时间微分的值。比较器124,在该示例中,对输出电压vout(t)与0v(更准确地说,相当于电流信号j1为0的情况的规定的阈值)进行比较,将输出电压波形vcom(t)提供至致动器驱动电路121,其中,输出电压波形vcom(t)包含:在输出电压vout(t)到达0v的时刻(过零(zero cross)时刻)上升的脉冲pc。
[0145]
致动器驱动电路121利用该脉冲pc的上升时刻进行上述的驱动电压vin(t)的下降pd的时刻控制。即,致动器驱动电路121使驱动电压vin(t)的下降pd的时刻与输出电压vout(t)到达规定的阈值的时刻一致。
[0146]
图9是示出另一个实施例中的各信号的时间变化的曲线图。在该实施例中,虽然占空比与图8的实施例相同为50%,但是,将驱动电压vin(t)的上升pu的时刻,以从可动反射镜5的移位量z(t)为往复运动的折返点即极大点za或极小点zb的时刻稍微延迟的方式,通过致动器驱动电路121进行控制。另外,将驱动电压vin(t)的下降pd的时刻,以从可动反射镜5通过极大点za与极小点zb的中点zc的时刻稍微延迟(参照图中的箭头)的方式,通过致动器驱动电路121进行控制。即,致动器驱动电路121使下降pd的时刻从输出电压vout(t)到达规定的阈值的时刻以一定时间的量向后错开。例如,该一定时间是驱动电压vin(t)的周期的0.1%以上且15%以下。
[0147]
该实施例中,即使过了电容ca(t)的极大时刻,驱动电压vin(t)也暂时维持恒定值vh。从而,来自电流电压转换电路123的输出电压vout(t),在到达0v之后,直至驱动电压vin(t)下降,维持正值。因而,来自比较器124的输出电压波形vcom(t)中包含的各脉冲pc的时间宽度根据下降pd的时刻的延迟而增大。换言之,输出电压波形vcom(t)的从上升到下降的
时间表示下降pd的时刻的延迟时间。
[0148]
图10是示出再一个实施例中的各信号的时间变化的曲线图。在该实施例中,将占空比设为小于50%(例如45%),将驱动电压vin(t)的上升pu的时刻,以从可动反射镜5的移位量z(t)为极大点za或极小点zb的时刻稍微延迟(参照图中的箭头)的方式,通过致动器驱动电路121进行控制。另外,驱动电压vin(t)的下降pd的时刻,与图8同样地,以与可动反射镜5通过中点zc的时刻一致的方式进行控制。
[0149]
在此,对本实施方式的反射镜器件7的驱动方法总结如下。即,本实施方式的驱动方法包括:在固定梳齿电极16、18与可动梳齿电极17、19之间施加驱动电压vin(t)的驱动步骤。驱动电压vin(t)的时间波形,周期性地反复上升pu和下降pd,并且包含在上升pu后且下降pd前为恒定电压vh的期间。在驱动步骤中,将因固定梳齿电极16、18与可动梳齿电极17、19之间的电容ca的变化而在上述期间内从固定梳齿电极16、18或可动梳齿电极17、19输出的电流信号j1转换为电压信号,从而生成与电容ca的时间微分值成比例的电容微分信号vout(t)。并且,检测电容微分信号vout(t)到达规定的阈值的时刻,将该时刻与下降pd的时刻的关系控制成恒定。此时,使下降pd的时刻,与电容微分信号vout(t)到达规定的阈值的时刻一致(参照图8、图10),或者从电容微分信号vout(t)到达规定的阈值的时刻以一定时间的量向后错开(参照图9)。另外,将规定的阈值设为相对于电流信号j1为0的情况的值(例如0v)。进而,将驱动电压vin(t)的时间波形设为周期性地包含具有上升pu和下降pd的矩形波,将驱动电压vin(t)的占空比设为20%以上且小于50%。在驱动步骤中,使用tia将电流信号j1转换为作为电压信号的电容微分信号vout(t),并使用比较器124进行电容微分信号vout(t)与规定的阈值的比较。
[0150]
另外,在上述驱动方法中,驱动步骤例如通过设置在光学模块1a的外部的计算机通过执行程序而实现。程序,一边将电容微分信号vout(t)到达规定的阈值的时刻与下降pd的时刻的关系控制成恒定,一边控制驱动电压vin(t)的上升pu的时刻和下降pd的时刻。
[0151]
针对通过以上说明的本实施方式的反射镜器件7和反射镜器件7的驱动方法所得到的效果,与现有的技术问题一起进行说明。通常,可动反射镜5的共振频率由于温度变化和湿度变化等而变动。当因可动反射镜5的共振频率的变动而驱动电压vin(t)的频率偏离可动反射镜5的共振频率时,可动反射镜5的以最大振幅的动作受到破坏。特别是,在弹性支承可动反射镜5的部分(具体而言,杆131、141、第一扭杆135、145和第二扭杆136、146)的弹性系数较小等、可动反射镜5的最大振幅变大的情况下,振幅相对于频率的非线性变大,即使驱动电压vin(t)的频率稍微偏离可动反射镜5的共振频率,振幅也会大幅地减小。
[0152]
针对该问题,在本实施方式中,将具有周期性地反复上升pu和下降pd的时间波形的驱动电压vin(t)施加在固定梳齿电极16、18与可动梳齿电极17、19之间。从而,能够使驱动电压vin(t)的频率接近可动反射镜5的共振频率,由此使可动反射镜5的振幅接近最大振幅。此时,由于固定梳齿电极16、18与可动梳齿电极17、19之间的电容ca的变化而从固定梳齿电极16、18或可动梳齿电极17、19输出电流信号j1。在驱动电压vin(t)的时间波形包含成为恒定电压(但是0v除外)期间的情况下,该期间内的电流信号j1表示固定梳齿电极16、18与可动梳齿电极17、19之间的电容ca的微分值。例如,在可动反射镜5通过振幅的中心时,电容ca为极大,因此,该电流信号j1的电流值瞬时地为0。
[0153]
本实施方式中,驱动电压vin(t)的时间波形包含:在上升pu后且下降pd前为恒定
电压vh的期间。并且,将该期间内将从固定梳齿电极16、18或可动梳齿电极17、19输出的电流信号j1转换为电压信号,而生成表示电容ca的微分值的电容微分信号vout(t)。进而,检测该电容微分信号vout(t)到达规定的阈值的时刻,将该时刻与下降pd的时刻的关系控制成恒定。由此,能够使驱动电压vin(t)的下降pd时的可动反射镜5的位置恒定,因此,能够与可动反射镜5的共振频率的变动无关地使驱动电压vin(t)的频率接近该共振频率。
[0154]
图11的(a)部分、(b)部分和(c)部分是,作为一个实施例,分别示出驱动电压vin(t)、电容微分信号vout(t)和来自比较器124的输出电压vcom(t)的时间波形的实测数据的曲线图。此外,在该例中,将驱动电压vin(t)的脉冲高度设为75vpp,驱动电压vin(t)的频率设为537hz,驱动电压vin(t)的占空比设为45%,tia的反馈电阻123b的电阻值设为3.3mω。从这些图能够明确,根据本实施方式,能够相对于电容微分信号vout(t)为规定的阈值(该例中为0v)的时刻,将驱动电压vin(t)的下降pd的时刻控制成恒定的关系。
[0155]
另外,图12是示出电容微分信号vout(t)为0v的时刻(即,固定梳齿电极16、18与可动梳齿电极17、19最靠近的时刻)和下降pd的时刻的时间差与驱动电压vin(t)的频率的关系的实测结果的曲线图。另外,该时间差表示为相对于驱动电压vin(t)的周期的比率(以下称为峰值移位(peak shift)率)。在该实测中,将驱动电压vin(t)的脉冲高度设为75vpp,驱动电压vin(t)的占空比设为45%。另外,使驱动电压vin(t)的频率以0.1hz为单位地变化,并以约0.1%的精度检测上述时间差。从图12明确地可知,在图11中的vcom(t)的输出信号在下降pd前产生的情况下,驱动电压vin(t)的频率越大,则峰值移位率越低。
[0156]
如图8和图10所示,致动器驱动电路121(在驱动步骤中)也可以使下降pd的时刻与电容微分信号vout(t)到达规定的阈值的时刻一致。例如通过这样的结构,能够将电容微分信号vout(t)到达规定的阈值的时刻与下降pd的时刻的关系控制成恒定。
[0157]
或者,如图9所示,致动器驱动电路121(在驱动步骤中)也可以使下降pd的时刻从电容微分信号vout(t)到达规定的阈值的时刻以一定时间的量向后错开。即使是这样的结构,也能够将电容微分信号vout(t)到达规定的阈值的时刻与下降pd的时刻的关系控制成恒定。另外,能够确认:在驱动电压下降(即电容微分信号vout(t)消失)前,电容微分信号vout(t)到达了规定的阈值,因此,能够更加可靠地检测电容微分信号vout(t)到达规定的阈值的时刻。
[0158]
如本实施方式那样,规定的阈值也可以是相当于电流信号j1为0的情况的值(一个例子中是0v)。该情况下,能够高精度地检测可动梳齿电极17、19与固定梳齿电极16、18最靠近的时刻(在一个实施例中,是适于驱动电压vin(t)的下降的时刻)。
[0159]
如本实施方式那样,也可以是,驱动电压vin(t)的时间波形周期性地包含具有上升pu和下降pd的矩形波,驱动电压vin(t)的占空比为20%以上且小于50%。假设将驱动电压vin(t)的占空比设为50%,则有可能因控制误差等而在可动梳齿电极17、19与固定梳齿电极16、18沿彼此分离的方向移动的时刻施加静电引力,引起可动反射镜5的振幅减小。通过将驱动电压vin(t)的占空比设为小于50%,能够降低这样的风险。另外,通过将驱动电压vin(t)的占空比设为20%以上,能够使足够的静电引力作用在可动梳齿电极17、19与固定梳齿电极16、18之间。
[0160]
如本实施方式那样,时刻检测电路122也可以包括对电容微分信号vout(t)与规定的阈值进行比较的比较器124。换言之,在驱动步骤中,也可以使用比较器124进行电容微分
信号vout(t)与规定的阈值的比较。该情况下,能够通过简单的电路进行电容微分信号vout(t)到达规定的阈值的时刻的检测,因此,能够有助于反射镜器件7的小型化和低成本化。另外,与例如使用软件对电容微分信号vout(t)与规定的阈值进行比较的结构相比,能够仅在电路基板上进行该比较,在这一点上也有助于结构的简化。而且,在使用组装到计算机的软件进行上述比较的情况下,区分从负侧向正侧跨越阈值的时刻和从正侧向负侧跨越阈值的时刻较为困难。与之相对地,比较器124由于仅在驱动电压vin(t)为恒定值vh的期间动作,因此,仅输出从负侧向正侧跨越阈值的时刻,能够容易地进行上述比较。另外,这并不妨碍为了电容微分信号vout(t)与规定的阈值的比较,代替比较器124而使用组装到计算机的软件。
[0161]
如本实施方式那样,时刻检测电路122也可以包括:将电流信号j1转换为电压信号vout(t)的tia。换言之,在驱动步骤中,也可以使用tia将电流信号j1转换为电压信号vout(t)。该情况下,例如与将电阻(分压电阻shunt resistor)与固定梳齿电极16、18或可动梳齿电极17、19串联连接,并利用该电阻上的压降来将电流信号j1转换为电压信号vout(t)的情况相比,能够降低梳齿电极间的电压变动,在梳齿电极间高精度地施加期望的电压。
[0162]
在此,作为使驱动电压vin(t)的频率接近该共振频率的其他方式,可以考虑:连续地检测可动反射镜5的移位量,并与可动反射镜5的移位量的极大和/或极小配合地控制驱动电压vin(t)的上升pu和下降pd的时刻。图32是作为比较例示出检测可动反射镜5的移位量的极大和/或极小的电路的图。在该电路中,将来自正弦波生成电路201的正弦波信号sa叠加于来自致动器驱动电路的驱动电压,并施加在固定梳齿电极与可动梳齿电极之间。另外,在图32中,该固定梳齿电极和可动梳齿电极表示为可变电容202。正弦波信号sa的频率比可动反射镜5的共振频率足够大。另一方面,将使来自正弦波生成电路201的正弦波信号sa的相位偏移了180
°
的信号,施加在为基准的固定电容203上。并且,将从可变电容202和固定电容203输出的电流相加,将相加后的电流输入包括运算放大器204a的运算电路204。该情况下,从运算电路204输出的信号sb由下述式(7)表示。此外,vsa(t)表示正弦波信号sa的电压波形,vsb(t)表示信号sb的电压波形,c是可变电容202的电容值,c
ref
是固定电容203的电容值,c0是运算电路204的反馈电容204b的电容值。
[0163][0164]
该信号sb的包络h表示可变电容202的电容值即可动反射镜5的移位量。之后,将信号sb的包络h通过包络检波器205进行检测,并将检测后的包络h通过放大器206进行放大。并且,将放大后的信号sc输入到低通滤波器207,从该信号sc中去除正弦波信号sa的频率分量。将通过低通滤波器207后的信号sc输入到模数转换器208,在模数转换器208中将信号sc转换为数字信号。之后,通过未图示的数字电路,检测信号sc的极大时刻和/或极小时刻(即可动反射镜5的移位的极大时刻和/或极小时刻)。
[0165]
然而,图32所示的方式具有电路规模大且电路变得复杂这样的问题。与之相对地,根据本实施方式的方式,通过将功能仅集中于检测可动反射镜5通过规定位置的时刻(固定梳齿电极16、18与可动梳齿电极17、19最靠近的时刻),即检测梳齿电极间的静电电容的变化,从而如图5所示,能够通过非常简单的电路结构实现同样的功能。另外,在像图32所示的方式那样将可变电容202的电容值原样处理的情况下,在电容值的峰值附近,时间波形变得
陡峭,噪声容易集中。因此,难以相对于电容值的峰值使驱动电压的下降时刻高精度地匹配。与之相对地,根据本实施方式,即使在电容ca的值为峰值的时刻附近也容易将电流信号j1的s/n比保持为较高,能够相对于电容ca的峰值使驱动电压vin(t)的下降时刻高精度地匹配。
[0166]
另外,图32所示的方式还具有下述问题。图33是示出包络检波器的典型例的电路图。另外,图34是示出图33所示的包络检波器的输入信号vi和输出信号vo的示例的曲线图。如图34所示,来自包络检波器的输出信号vo与实际的包络h不同,包含与输入信号vi的频率对应的纹波。这是导致可动反射镜5的移位量的检测精度、乃至可动反射镜5的移位的极大时刻和/或极小时刻的检测精度降低的主要原因。此外,图33所示的电容211的电容值与电阻212的电阻值的积的值越大,则输出信号vo中包含的纹波越小。然而,该情况下如图35所示,来自包络检波器的输出信号vo变得不能跟随输入信号vi的实际的包络h。
[0167]
与之相对地,在本实施方式中,基于在施加了恒定电压vh时,将从固定梳齿电极16、18(或可动梳齿电极17、19)输出的电流信号j1进行电流-电压转换而得到的电容微分信号vout(t),来检测可动反射镜5通过规定位置的时刻,因此,不需要包络检波器,关于纹波的上述问题也不会产生。因此,能够提高可动反射镜5通过规定位置的时刻的检测精度。
[0168]
另外,图32所示的方式进一步还具有下述问题。通常,为了在固定梳齿电极与可动梳齿电极之间产生足够大的静电力,作为驱动电压vin(t)需要施加数十~百伏特这样的高压。这样的高压一般使用dc-dc转换器等升压电路生成。并且,在开关方式的升压电路中,无法避免因开关(switching)而产生纹波。图13是概念性地示出叠加在驱动电压上的纹波ri的图。如该图所示,纹波ri是具有与开关频率相同频率的周期性的波,以驱动电压为中心振动。在振幅δv的纹波ri叠加在驱动电压上的情况下,上述式(7)被如下所述地修正。
[0169][0170]
该情况下,如果将vsa(t)设为1v、δv设为0.1v,则最大产生10%的输出误差。
[0171]
与之相对地,在本实施方式中,在振幅δv的纹波ri叠加在恒定电压vh上的情况下,上述式(6)被如下所述地修正。
[0172][0173]
恒定电压vh的大小至少为10v,因此,即使δv为0.1v,输出误差也为1%以下。即,根据本实施方式,能够降低驱动电压中包含的纹波ri的影响,获得高检测精度。
[0174]
(第一变形例)
[0175]
图14是示出上述实施方式的第一变形例的电流电压转换电路123a的结构的电路图。如该图所示,该电流电压转换电路123a构成为包括:放大器123a、反馈电阻123b和电容器123e。反馈电阻123b在放大器123a的反相输入端子与输出端子之间串联连接。电容器123e在放大器123a的反相输入端子与输出端子之间与反馈电阻123b并联连接。放大器123a的非反相输入端子与基准电位线gnd连接。在该电路中,电容器123e用于调整电流电压转换电路123a的截止频率fc。将反馈电阻123b的电阻值设为rf,电容器123e的电容值设为cf,则电流电压转换电路123a的截止频率fc作为fc=1/(2π
·
rf
·
cf)给出。通过恰当地调整该截止频率fc,能够去除电容微分信号vout(t)中包含的、与致动器动作无关的高频分量。
[0176]
电流电压转换电路123a还包括钳位电路125。钳位电路125设置为用于缩短因驱动电压vin(t)的上升pu和下降pd而引起的电容微分信号vout(t)的变动期间。该例中,钳位电路125具有开关二极管(以下简称二极管)125a和125b。二极管125a、125b,在固定梳齿电极16、18(或可动梳齿电极17、19)与放大器123a的反相输入端子之间节点n2与基准电位线gnd之间,并联连接。二极管125a以从节点n2向基准电位线gnd的方向为正向地连接,二极管125b以从基准电位线gnd向节点n2的方向为正向地连接。换言之,在节点n2与基准电位线gnd之间,2个二极管125a、125b彼此反向地并联连接。
[0177]
二极管125a,在节点n2的电位超过某个阈值(>0)的情况下导通,使电流从节点n2流向基准电位线gnd。另外,二极管125b,在节点n2的电位低于某个阈值(<0)的情况下导通,使电流从基准电位线gnd流向节点n2。
[0178]
在此,对因驱动电压vin(t)的上升pu和下降pd而引起的电容微分信号vout(t)的变动进行说明。图15是示出在上述实施方式中电容ca不发生变化(即,可动反射镜5的z方向位置恒定)的情况下的、驱动电压vin(t)、电流信号j1、放大器123a的反相输入端子电压va、反馈电流j2以及电容微分信号vout(t)的时间波形的图。在此,设:驱动电压vin(t)在时刻t0上升,在时刻t0’下降。
[0179]
当在时刻t0驱动电压vin(t)上升时,相当于电压vh与电容ca的积(ca·vh
)的电荷瞬时地流入固定梳齿电极16、18与可动梳齿电极17、19之间的电容,在电流信号j1产生正的脉冲波j1a。此时,由于满足j1 j2=0,因此,在反馈电流j2产生负的脉冲波j2a。并且,产生了负的脉冲波j2a的结果是,从放大器123a输出的电压信号(电容微分信号)vout(t)在负侧饱和(波形pa)。该饱和波形pa在与脉冲波j1a的高度对应的某个期间持续,在时刻t1收敛。另外,当电压信号vout(t)在负侧饱和时,放大器123a的反相输入端子无法维持虚拟接地,为了使反馈电流j2减小,放大器123a的反相输入端子电压va瞬时地上升(波形vaa)。
[0180]
另外,当在时刻t0’驱动电压vin(t)下降时,积累在固定梳齿电极16、18与可动梳齿电极17、19之间的电容的电荷瞬时地流出,在电流信号j1产生负的脉冲波j1b。此时,由于满足j1 j2=0,因此,在反馈电流j2产生正的脉冲波j2b。并且,产生了正的脉冲波j2b的结果是,从放大器123a输出的电压信号(电容微分信号)vout(t)在正侧饱和(波形pb)。该饱和波形pb在与脉冲波j1b的高度对应的某个期间持续,在时刻t1’收敛。另外,当电压信号vout(t)在正侧饱和时,放大器123a的反相输入端子无法维持虚拟接地,为了使反馈电流j2增大,放大器123a的反相输入端子电压va瞬时地下降(波形vab)。
[0181]
上述动作也在上述式(2)中说明。即,式(2)包含驱动电压vin(t)的时间微分值dvin(t)/dt。dvin(t)/dt在驱动电压vin(t)恒定时能够忽略,但在驱动电压vin(t)的上升和下降无法忽略,甚至会对电容微分信号vout(t)带来过大的影响。例如,在电容ca为10pf,dvin(t)为100v,上升(或下降)时间dt为100ns的情况下,式(2)右边第二项能够如下计算。
[0182][0183]
能够容易理解:在反馈电阻123b的电阻值rf例如为上述的1mω的情况下,放大器123a的输出电压vout(t)计算得到1000v,输出电压vout(t)饱和。
[0184]
从而,在从时刻t0至时刻t1的期间以及时刻从t0’至时刻t1’的期间,即使因可动反射镜5的移动导致固定梳齿电极16、18与可动梳齿电极17、19之间的电容ca变化,该变化
也不体现在电容微分信号vout(t)中,无法检测到该变化。
[0185]
另外,图36是示出在图32所示的比较例的电路中实测从运算电路204输出的信号sb的示例的曲线图。此外,该图中,曲线图g3表示驱动电压vin(t),曲线图g4表示信号sb。参照图36的部分e可知,在驱动电压vin(t)的上升和下降的时刻,信号sb大幅振动而发生饱和。这样,在图32所示的比较例的方式中,也产生与上述同样的问题。
[0186]
针对上述问题,本变形例设置了钳位电路125。图16是示出在本变形例中电容ca不发生变化的情况下的、驱动电压vin(t)、电流信号j1、放大器123a的反相输入端子电压va、电流j3和j4、反馈电流j2以及电容微分信号vout(t)的时间波形的图。在该图中也设,驱动电压vin(t)在时刻t0上升,在时刻t0’下降。并且,为了进行比较,用虚线示出图15所示的时间波形。
[0187]
当在时刻t0驱动电压vin(t)上升时,电荷瞬时地流入固定梳齿电极16、18与可动梳齿电极17、19之间的电容,在电流信号j1产生正的脉冲波j1a。此时,二极管125a导通而电流j3流动,因此,脉冲波j1a的高度被抑制。因而,由于满足j1 j2=0而在反馈电流j2产生的负的脉冲波j2a同样,其高度被抑制。从而,电容微分信号vout(t)的向负侧的饱和波形pa在短时间内收敛。
[0188]
另外,当在时刻t0’驱动电压vin(t)下降时,积累在固定梳齿电极16、18与可动梳齿电极17、19之间的电容的电荷瞬时地流出,在电流信号j1产生负的脉冲波j1b。此时,二极管125b导通而电流j4流动,因此,脉冲波j1b的高度被抑制。因而,由于满足j1 j2=0而在反馈电流j2产生的正的脉冲波j2b同样,其高度被抑制。从而,电容微分信号vout(t)的向正侧的饱和波形pb同样在短时间内收敛。
[0189]
这样,根据本变形例,通过设置钳位电路125,能够缩短因驱动电压vin(t)的上升pu和下降pd而引起的电容微分信号vout(t)的变动期间。因而,能够抑制电容微分信号vout(t)到达规定的阈值的时刻的检测被该变动妨碍。
[0190]
另外,图17的(a)部分是示出本变形例的钳位电路125的电路图,图17的(b)部分是示出设置在运算放大器的通常的保护电路126的电路图。如图17的(a)部分所示,在本变形例的钳位电路125中,方向彼此不同的二极管125a、125b彼此并联地连接在节点n2与基准电位线gnd之间。与之相对地,如图17的(b)部分所示,在通常的保护电路126中,一个二极管126a的阳极与节点n2连接,阴极与正的恒定电位线v 连接。另外,另一个二极管126b的阳极与负的恒定电位线v-连接,阴极与节点n2连接。换言之,在恒定电位线v-与恒定电位线v 之间,二极管126a、126b以相同方向串联连接,并且二极管126a与二极管126b之间的节点n2与放大器123a的反相输入端子连接。从而,本变形例的钳位电路125的结构与设置在运算放大器的通常的保护电路126的结构完全不同。
[0191]
(第二变形例)
[0192]
图18是示出上述实施方式的第二变形例的电流电压转换电路123b的结构的电路图。如该图所示,该电流电压转换电路123b构成为包括:放大器123a、反馈电阻123b和电容器123e。它们的结构与上述第一变形例相同,故省略说明。
[0193]
电流电压转换电路123b还包括:软限幅器(soft limter)电路127和128。软限幅器电路127和128设置为用于缩短因驱动电压vin(t)的上升pu和下降pd而引起的电容微分信号vout(t)的变动期间。该例中,软限幅器电路127具有:开关二极管(以下简称二极管)
127a、和电阻127b、127c。二极管127a和电阻127b在节点n2与放大器123a的输出端子之间彼此串联连接。更详细而言,二极管127a的阳极与节点n2连接,二极管127a的阴极经由电阻127b与放大器123a的输出端子连接。并且,二极管127a与电阻127b之间的节点n3经由电阻127c与正的恒定电位线v 连接。
[0194]
另外,软限幅器电路128具有:开关二极管(以下简称二极管)128a、和电阻128b、128c。二极管128a和电阻128b在节点n2与放大器123a的输出端子之间彼此串联连接。更详细而言,二极管128a的阳极与经由电阻128b与放大器123a的输出端子连接,二极管128a的阴极与节点n2连接。并且,二极管128a与电阻128b之间的节点n4经由电阻128c与负的恒定电位线v-连接。
[0195]
图19、图20和图21是对本变形例的动作进行说明的图。这些图的(a)部分简化示出图18所示的电流电压转换电路123b。这些图的(b)部分是示出电流信号j1与电容微分信号vout的相关性的曲线图。图19的(b)部分所示的区域f1,是以电流信号j1和电容微分信号vout一同为0的点(即原点)为中心的区域,电流信号j1与电容微分信号vout具有比例关系。该比例关系的比例系数由反馈电阻123b的电阻值rf决定。在该区域f1中,如图19的(a)部分所示,朝向节点n1流入电流信号j1和反馈电流j2,彼此抵消。在该区域f1中,软限幅器电路127和128不动作。
[0196]
与之相对地,图20的(b)部分所示的区域f2是电容微分信号vout超出某个电压v
l
的区域,电流信号j1与电容微分信号vout具有比例关系。在该区域f2中,由于电容微分信号vout超出某个电压v
l
而二极管128a导通,经由二极管128a和电阻128b反馈电流j5流动。此时,如果电阻128b的电阻值rg比反馈电阻123b的电阻值rf足够小,则反馈电流j5增大至可忽略反馈电流j2的程度,电流信号j1与电容微分信号vout的比例系数由电阻128b的电阻值rg决定。因而,区域f2中的比例系数变得比区域f1中的比例系数小,倾斜变缓。
[0197]
同样地,图21的(b)部分所示的区域f3是电容微分信号vout低于某个电压v
l-的区域,电流信号j1与电容微分信号vout具有比例关系。在该区域f3中,由于电容微分信号vout低于某个电压v
l-而二极管127a导通,经由电阻127b和二极管127a反馈电流j6流动。此时,如果电阻127b的电阻值rh比反馈电阻123b的电阻值rf足够小,则反馈电流j6增大至可忽略反馈电流j2的程度,电流信号j1与电容微分信号vout的比例系数由电阻127b的电阻值rh决定。因而,区域f3中的比例系数变得比区域f1中的比例系数小,倾斜变缓。另外,电阻127b的电阻值rh也可以与电阻128b的电阻值rg相等。该情况下,区域f3中的比例系数变得与区域f2中的比例系数相等。
[0198]
另外,电压v
l
和电压v
l-由下述式(11)和式(12)决定。vf是二极管127a、128a的正向电压。此外,ri是电阻128c的电阻值,rj是电阻127c的电阻值。
[0199][0200][0201]
本变形例也是,通过与第一变形例同样的作用,驱动电压vin(t)上升时的电容微分信号vout(t)的饱和波形pa(参照图16)和驱动电压vin(t)下降时的电容微分信号vout
(t)的饱和波形pb(参照图16)在短时间内收敛。从而,根据本变形例,通过设置软限幅器电路127和128,能够缩短因驱动电压vin(t)的上升pu和下降pd而引起的电容微分信号vout(t)的变动期间。因而,能够抑制电容微分信号vout(t)到达规定的阈值的时刻的检测被该变动妨碍。另外,电流电压转换电路也可以一并具备本变形例的软限幅器电路127和128以及第一变形例的钳位电路125。
[0202]
图22是关于第一变形例和第二变形例的模拟结果的曲线图。图22的(a)部分示出驱动电压vin(t)的时间变化。在(a)部分中,纵轴表示电压(单位:v),横轴表示时间(单位:毫秒)。另外,图22的(b)部分示出电容微分信号vout(t)的时间变化。在(b)部分中,纵轴表示电压(单位:v),横轴表示时间(单位:毫秒)。另外,在(b)部分中,曲线图g5表示钳位电路和软限幅器电路均未设置的情况,曲线图g6表示设置了钳位电路125的情况,曲线图g7表示设置了软限幅器电路127和128和情况,曲线图g8表示设置了钳位电路125以及软限幅器电路127和128的情况。从这些曲线图g5~g8能够明确,通过设置钳位电路125和软限幅器电路127、128中的至少一个,能够缩短因驱动电压vin(t)的上升pu和下降pd而引起的电容微分信号vout(t)的变动期间。特别是,在设置了软限幅器电路127、128的情况下,该效果显著。
[0203]
(第三变形例)
[0204]
图23是示出上述实施方式的第三变形例的驱动部12a的结构的框图。本变形例的驱动部12a除了上述实施方式的驱动部12(参照图5)的结构,还具有移位量检测部129。移位量检测部129构成为包括:积分电路129a和放大器129b。积分电路129a与电流电压转换电路(tia)123的输出端连接,从电流电压转换电路123接收电容微分信号vout(t)。并且,积分电路129a进行电容微分信号vout(t)的时间积分。
[0205]
图24是示出本变形例中的各信号的时间变化的曲线图。在该图中,自上依次示出驱动电压vin(t)、可动反射镜5的移位量z(t)、电容ca(t)、输出电压vout(t)、和来自积分电路129a的输出电压波形vout2(t)。另外,各曲线图的纵轴表示电压或电容,各曲线图的横轴表示时间。另外,积分电路129a在驱动电压vin(t)为v
l
的期间内被复位。
[0206]
在此,下述式(13)成立。从而,为了得到相当于δca的值,将积分结果除以vh即可。放大器129b是为此而设置,以(1/vh)倍的增益将来自积分电路129a的输出信号放大。
[0207][0208]
像本变形例这样,通过进行电容微分信号vout(t)的时间积分,能够容易地检测某个期间的可动反射镜5的移位量。另外,也可以将本变形例的移位量检测部129设置在第一变形例或第二变形例中。
[0209]
(第四变形例)
[0210]
在上述实施方式中,在固定梳齿电极16(18)与可动梳齿电极17(19)之间施加驱动电压vin(t),基于从固定梳齿电极16(18)或可动梳齿电极17(19)输出的电流信号j1,检测电容微分信号vout(t)到达规定的阈值的时刻。本发明不限于这样的方式,也可以是,一边在固定梳齿电极16(18)的一部分与可动梳齿电极17(19)的一部分之间施加驱动电压vin(t),一边在固定梳齿电极16(18)的剩余部分与可动梳齿电极17(19)的剩余部分之间施加时刻检测用的电压,基于从任意剩余部分输出的电流信号j1,检测电容微分信号vout(t)到达规定的阈值的时刻。
[0211]
例如,在图4所示的结构中,将第一电极支承部138a(148a)从第二电极支承部138b(148b)和第三电极支承部138c(148c)电分离,并且将与第一电极支承部138a(148a)相对的固定梳齿电极16(18)的一部分16a(18a),从与第二电极支承部138b(148b)和第三电极支承部138c(148c)分别相对的固定梳齿电极16(18)的一部分16b(18b)电分离。并且,在第二电极支承部138b(148b)和第三电极支承部138c(148c)与固定梳齿电极16b(18b)之间施加驱动电压vin(t),驱动可动反射镜5。另一方面,对第一电极支承部138a(148a)或固定梳齿电极16a(18a)连接电流电压转换电路123和比较器124,并且在第一电极支承部138a(148a)与固定梳齿电极16a(18a)之间施加时刻检测用的电压。并且,基于从第一电极支承部138a(148a)或固定梳齿电极16a(18a)输出的电流信号j1,检测电容微分信号vout(t)到达规定的阈值的时刻。
[0212]
即,本变形例的反射镜器件具备:基底11(基部);可动反射镜5(可动部),其被支承为相对于基底11能够弹性移位;第一固定梳齿电极16b(18b),其包括与多个第一梳齿(与第二电极支承部138b(148b)和第三电极支承部138c(148c)相对的多个梳齿16a(18a)),并设置于基底11;以及第一可动梳齿电极17b(19b),其包括与多个第一梳齿交替配置的多个第二梳齿(从第二电极支承部138b(148b)和第三电极支承部138c(148c)延伸的多个梳齿17a(19a)),通过在其与第一固定梳齿电极16b(18b)之间产生的静电力,驱动可动反射镜5。本变形例的反射镜器件还具备:第二固定梳齿电极16a(18a),其包括多个第三梳齿(与第一电极支承部138a(148a)相对的多个梳齿16a(18a)),并设置于基底11;和第二可动梳齿电极17a(19a),其包括与多个第三梳齿交替配置的多个第四梳齿(从第一电极支承部138a(148a)延伸的多个梳齿17a(19a))。并且,致动器驱动电路121,将具有周期性地反复上升pu和下降pd的时间波形的驱动电压vin(t),施加在第一固定梳齿电极16b(18b)与第一可动梳齿电极17b(19b)之间。
[0213]
在此,图25是概略地示出本变形例的反射镜器件所具备的时刻检测电路122a的结构的图。时刻检测电路122a构成为包括:电压生成电路130、电流电压转换电路123和比较器124。电压生成电路130,将包含成为除0v以外的恒定电压vh的期间的时刻检测用电压,施加在表示为可变电容的第二固定梳齿电极16a(18a)与第二可动梳齿电极17a(19a)之间。电流电压转换电路123,将因第二固定梳齿电极16a(18a)与第二可动梳齿电极17a(19a)之间的电容ca的变化而在该期间内从第二固定梳齿电极16a(18a)或第二可动梳齿电极17a(19a)输出的电流信号j1转换为电压信号,从而生成电容微分信号vout(t)。比较器124检测电容微分信号vout(t)到达规定的阈值的时刻。另外,电流电压转换电路123和比较器124的详细结构与上述实施方式相同。致动器驱动电路121,以在时刻检测电路122a检测的时刻与下降pd的时刻的关系成为恒定的方式,生成驱动电压vin(t)。驱动电压vin(t)施加在表示为可变电容的第一固定梳齿电极16b(18b)与第一可动梳齿电极17b(19b)之间。此外,第一固定梳齿电极16b(18b)和第一可动梳齿电极17b(19b)中的、连接到致动器驱动电路121侧的相反侧的梳齿电极与恒定电位配线电连接,或者设为浮置(floating)电位。
[0214]
在本变形例中,将具有周期性地反复上升pu和下降pd的时间波形的驱动电压vin(t)施加在第一固定梳齿电极16b(18b)与第一可动梳齿电极17b(19b)之间。从而,通过使驱动电压vin(t)的频率接近可动反射镜5的共振频率,能够使可动反射镜5的振幅接近最大振幅。此时,第二可动梳齿电极17a(19a)同样与可动反射镜5一起移位,因此,由于第二固定梳
齿电极16a(18a)与第二可动梳齿电极17a(19a)之间的电容ca的变化而从第二固定梳齿电极16a(18a)或第二可动梳齿电极17a(19a)输出电流信号j1。当将包含成为除0v以外的恒定电压vh的期间的时刻检测用电压施加在第二固定梳齿电极16a(18a)与第二可动梳齿电极17a(19a)之间时,该期间内的电流信号j1表示第二固定梳齿电极16a(18a)与第二可动梳齿电极17a(19a)之间的电容ca的微分值。例如,在可动反射镜5通过振幅的中心时,该电流信号j1的电流值瞬时地为0。
[0215]
本变形例中,将包含成为除0v以外的恒定电压vh的期间的时刻检测用电压施加在第二固定梳齿电极16a(18a)与第二可动梳齿电极17a(19a)之间。并且,将在该期间内从第二固定梳齿电极16a(18a)或第二可动梳齿电极17a(19a)输出的电流信号j1转换为电压信号,而生成表示电容ca的微分值的电容微分信号vout(t)。进而,检测该电容微分信号vout(t)到达规定的阈值的时刻,并将该时刻与下降pd的时刻的关系控制成恒定。由此,能够使驱动电压vin(t)的下降pd时的可动反射镜5的位置恒定,因此,能够与可动反射镜5的共振频率的变动无关地使驱动电压vin(t)的频率接近该共振频率。
[0216]
另外,在本变形例中,对从第二电极支承部138b(148b)和第三电极支承部138c(148c)延伸的多个梳齿17a(19a)施加驱动电压vin(t),对从第一电极支承部138a(148a)延伸的多个梳齿17a(19a)施加时刻检测用电压。如图4所示,第一电极支承部138a(148a)与可动反射镜5的距离比第二电极支承部138b(148b)和第三电极支承部138c(148c)与可动反射镜5的距离短。这样,施加时刻检测用电压的第二可动梳齿电极17a(19a)与可动反射镜5的距离,也可以比施加驱动电压vin(t)的第一可动梳齿电极17b(19b)与可动反射镜5的距离短。该情况下,能够进一步增大第二可动梳齿电极17a(19a)的振幅,或使第二可动梳齿电极17a(19a)更快移动,能够提高电容微分信号vout(t)到达规定的阈值的时刻的检测精度。
[0217]
另外,在像上述实施方式那样地对全部梳齿电极施加驱动电压vin(t)(换言之,使驱动用的梳齿电极与时刻检测用的梳齿电极共通)的情况下,与本变形例相比,能够进一步增大静电引力,进一步提高驱动力。
[0218]
另外,在本变形例中,如上所述,对与施加驱动电压vin(t)的固定梳齿电极16b(18b)和可动梳齿电极17b(19b)不同的固定梳齿电极16a(18a)和可动梳齿电极17a(19a),施加时刻检测用的电压。从而,时刻检测用的电压无需周期性地反复上升和下降,例如也可以连续地维持恒定电压vh。
[0219]
(第二实施方式)
[0220]
图26是作为第二实施方式示出mems致动器1b的结构的框图。mems致动器1b与上述实施方式的反射镜器件7不同,具有:在与厚度方向即z方向交叉(例如正交)的方向(本实施方式中为y方向)上振动的滑动(slide)方式的可动部。具体而言,本实施方式的mems致动器1b具备:配置在基板80(本实施方式中的基部)之上的固定梳齿电极81和可动梳齿电极82。在本实施方式中,固定梳齿电极81包括:固定在基板80之上的第一固定梳齿电极83和第二固定梳齿电极84。第一固定梳齿电极83包括多个第一梳齿83a。多个第一梳齿83a具有以y方向为长边方向的细长形状,并在x方向上排列配置。第二固定梳齿电极84包括多个第一梳齿84a。多个第一梳齿84a具有以y方向为长边方向的细长形状,并在x方向上排列配置。第一固定梳齿电极83和第二固定梳齿电极84隔着支承可动梳齿电极82的梁91(本实施方式中的可动部)在y方向上相对地配置。多个第一梳齿83a和多个第一梳齿84a分别朝向梁91延伸。
[0221]
可动梳齿电极82被具有弹性的梁91支承,与基板80之间隔着空隙,相对于基板80能够在y方向上相对地移位。本实施方式中,梁91与可动梳齿电极82一体地形成。并且,梁91的一端部即固定部92和梁91的另一端部即固定部93分别固定于基板80。由此,可动梳齿电极82具有双侧支撑梁结构。
[0222]
可动梳齿电极82包括多个第二梳齿82a和多个第二梳齿82b。多个第二梳齿82a具有以y方向为长边方向的细长形状,并在x方向上排列配置。同样地,多个第二梳齿82b具有以y方向为长边方向的细长形状,并在x方向上排列配置。多个第二梳齿82a相对于梁91配置在第一固定梳齿电极83侧,从梁91朝向第一固定梳齿电极83延伸。多个第二梳齿82b相对于梁91配置在第二固定梳齿电极84侧,从梁91朝向第二固定梳齿电极84延伸。可动梳齿电极82通过在其与固定梳齿电极81之间产生的静电力,驱动梁91。
[0223]
在第一固定梳齿电极83与可动梳齿电极82之间,施加具有与梁91的共振频率一致的频率的驱动电压。此外,在第二固定梳齿电极84与可动梳齿电极82之间,施加与该驱动电压反相的驱动电压。即,在第一固定梳齿电极83与可动梳齿电极82之间施加的驱动电压与在第二固定梳齿电极84与可动梳齿电极82之间施加的驱动电压具有互补的关系。当这些驱动电压施加在固定梳齿电极83、84与可动梳齿电极82之间时,因静电引力,梁91在y方向上振动。图27是示意地示出梁91位于一个振动端时的梁91的变形状态的图。
[0224]
本实施方式的mems致动器1b对每一个固定梳齿电极83、84单独具有图5所示的致动器驱动电路121、电流电压转换电路123和比较器124。或者,在本实施方式的mems致动器1b,也可以代替电流电压转换电路123而具有第一变形例的电流电压转换电路123a、第二变形例的电流电压转换电路123b或它们双方。另外,本实施方式的mems致动器1b还可以具备第三变形例的移位量检测部129。
[0225]
第一实施方式中例示了可动部(可动反射镜5)在梳齿电极的厚度方向上振动的结构,但也可以像本实施方式那样,可动部(梁91)在梳齿电极的长边方向上振动。在该情况下,也与第一实施方式同样地,能够与可动部的共振频率的变动无关地使驱动电压vin(t)的频率接近该共振频率。
[0226]
图28的(a)部分是示意地示出在第一固定梳齿电极83与可动梳齿电极82之间产生的电容c1,和在第二固定梳齿电极84与可动梳齿电极82之间产生的电容c2的图。图中的箭头表示可动梳齿电极82的移动方向(y方向)。可动梳齿电极82相对于第一固定梳齿电极83和第二固定梳齿电极84一边将x方向上的间隔δx维持为恒定,一边在y方向上振动。从而,当电容c1增大时电容c2减小,当电容c1减小时电容c2增大。
[0227]
图28的(b)部分是示出与电容c1、c2连接的电流电压转换电路123的电路图。在本实施方式中,对第一固定梳齿电极83和第二固定梳齿电极84共通地设置有可动梳齿电极82,因此,在该电路图中,电容c1、c2中的一个电极在节点n5短路。此外,对电容c1、c2中的另一个电极(即第一固定梳齿电极83和第二固定梳齿电极84)分别施加驱动电压vin1(t)和vin2(t)。驱动电压vin1(t)与驱动电压vin2(t)互补。即,当驱动电压vin1(t)的电压值为vh时,驱动电压vin2(t)的电压值为v
l
,当驱动电压vin1(t)的电压值为v
l
时,驱动电压vin2(t)的电压值为vh。
[0228]
图29是示出一个实施例中的各信号的时间变化的曲线图。在该图中,自上依次示出驱动电压vin1(t)、驱动电压vin2(t)、梁91的移位量y(t)、电容c1和c2、以及输出电压
vout(t)。另外,各曲线图的纵轴表示电压或电容,各曲线图的横轴表示时间。
[0229]
驱动电压vin1(t)和vin2(t)具有以一定周期交替反复上升pu和下降pd的时间波形。在图29所示的示例中,占空比为50%,驱动电压vin1(t)的上升pu的时刻与驱动电压vin2(t)的下降pd的时刻彼此一致,驱动电压vin1(t)的下降pd的时刻与驱动电压vin2(t)的上升pu的时刻彼此一致。并且,驱动电压vin1(t)的上升pu和驱动电压vin2(t)的下降pd的时刻,以与梁91的移位量y(t)为距第一固定梳齿电极83最远的极小点yb的时刻一致的方式,通过致动器驱动电路121进行控制。另外,驱动电压vin1(t)的下降pd和驱动电压vin2(t)的上升pu的时刻,以与梁91的移位量y(t)为距第二固定梳齿电极84最远的极大点ya的时刻一致的方式,通过致动器驱动电路121进行控制。
[0230]
固定梳齿电极83、84与可动梳齿电极82之间的电容c1(t)、c2(t)根据梁91的移位量y(t)而变化。电容c1(t),在移位量y(t)成为极大点ya的时刻成为极大,在移位量y(t)成为极小点yb的时刻成为极小。另外,电容c2(t),在移位量y(t)成为极大点ya的时刻成为极小,在移位量y(t)成为极小点yb的时刻成为极大。并且,来自电流电压转换电路123的输出电压vout(t),在驱动电压vin1(t)为除0以外的恒定值vh的期间,具有表示电容c1(t)的时间微分的值(实线部分),在驱动电压vin2(t)为除0以外的恒定值vh的期间,具有表示电容c2(t)的时间微分的值(虚线部分)。
[0231]
比较器124对输出电压vout(t)与规定的阈值(该例中为0v)进行比较,将输出电压波形提供至各致动器驱动电路121,其中,该输出电压波形包含在输出电压vout(t)到达阈值的时刻上升的脉冲。各致动器驱动电路121利用该脉冲的上升时刻,进行驱动电压vin1(t)、vin2(t)的下降pd的时刻控制。即,致动器驱动电路121使驱动电压vin1(t)、vin2(t)的下降pd的时刻与输出电压vout(t)到达规定的阈值的时刻一致。另外,也可以如图9所示的示例那样,致动器驱动电路121使下降pd的时刻从输出电压vout(t)到达规定的阈值的时刻以一定时间的量向后错开。或者,也可以如图10所示的例子那样,将占空比设为小于50%(例如45%),将驱动电压vin1(t)和vin2(t)的上升pu的时刻,以从梁91的移位量y(t)成为极大点ya或极小点yb的时刻稍微延迟的方式,通过致动器驱动电路121进行控制。
[0232]
图30的(a)部分是示出第一实施方式中的(vh)2与电容ca的变动幅度δc的关系的曲线图。图30的(b)部分是示出第二实施方式中的(vh)2与电容c1、c2的变动幅度δc的关系的曲线图。在这些图中,纵轴表示变动幅度δc(单位:f),横轴表示(vh)2(单位:v2)。如图30的(b)部分所示,在滑动方式的第二实施方式中,变动幅度δc与(vh)2的关系基本沿着直线l1,可以说变动幅度δc与(vh)2基本成正比。与之相对地,在上下振动方式的第一实施方式中,在变动幅度δc与(vh)2的关系中,存在2个比例系数。即,在(vh)2小于某个值的区域,变动幅度δc与(vh)2的关系沿着直线l2,在(vh)2大于某个值的区域,变动幅度δc与(vh)2的关系沿着直线l3。并且,直线l2的斜率与直线l3的斜率彼此不同,直线l2的斜率大于直线l3的斜率。
[0233]
上下振动方式的这种特性可以认为是由下述原因引起的。图31是示意地示出第一实施方式的固定梳齿电极16(18)和可动梳齿电极17(19)的图。现在,如图31的(a)部分所示,在可动梳齿电极17(19)在至少一部分与固定梳齿电极16(18)重叠的范围内移位的情况下,在固定梳齿电极16(18)与可动梳齿电极17(19)之间的电容ca中包括重叠(overlap)电容c
a1
和边缘(fringe)电容c
a2
。重叠电容c
a1
是在固定梳齿电极16(18)与可动梳齿电极17
(19)彼此重叠的部分产生的电容。边缘电容c
a2
是在固定梳齿电极16(18)与可动梳齿电极17(19)彼此不重叠的部分产生的电容。该情况下,电容ca的变化主要由重叠电容c
a1
的增减引起。另一方面,如图31的(b)部分所示,在可动梳齿电极17(19)移位至不与固定梳齿电极16(18)重合的范围的情况下,在固定梳齿电极16(18)与可动梳齿电极17(19)之间的电容ca中仅包括边缘电容c
a2
。该情况下,电容ca的变化主要由边缘电容c
a2
的增减引起。重叠电容c
a1
和边缘电容c
a2
的增减程度不同,因此,认为产生图30的(a)部分所示的特性。
[0234]
本公开的mems致动器、mems致动器的驱动方法和mems致动器控制程序不限于上述的实施方式,能够实施其他各种变形。例如,在上述各实施方式和各变形例中,作为驱动电压的时间波形例示了矩形波,但只要是周期性反复上升和下降、且具有包含除0以外的恒定电压的期间的波形即可,不限于矩形波。例如,作为驱动电压的时间波形,也可以应用上升和下降中的至少一个倾斜的梯形状的波形。另外,在驱动电压的上升波形中包含倾斜部分的情况下,能够将倾斜部分与该上升后的恒定电压部分之间的时刻、倾斜部分与该上升前的部分(上述实施方式中为0v)之间的时刻、以及上升波形中的倾斜部分的中途时刻中的任意,视作上述实施方式中的上升时刻。同样地,在驱动电压的下降波形中包含倾斜部分的情况下,能够将倾斜部分与该下降前的恒定电压部分之间的时刻、倾斜部分与该下降后的部分(上述实施方式中为0v)之间的时刻、以及下降波形中的倾斜部分的中途时刻中的任意,视作上述实施方式中的下降时刻。
[0235]
另外,在上述实施方式中,针对上下振动方式和滑动方式这2个方式应用了本发明,但mems致动器的动作方式不限于这些,例如在可动部为旋转的方式中也能够应用本发明。此外,在旋转反射镜方式中,可动部以由弹性体构成的旋转轴为中心旋转。该情况下,若想要增大可动梳齿电极的振幅来提高时刻检测精度,则将可动梳齿电极设置在远离旋转轴的位置。然而,可动部的共振频率与惯性矩的平方根成反比,惯性矩与距旋转轴的距离的平方成正比,因此,可动梳齿电极越远离旋转轴,则可动梳齿电极的重量越影响惯性矩,可动部的共振频率越降低。当可动部的共振频率降低时,旋转速度降低,因此,电容的时间变化量即电容微分信号变小,时刻检测精度的提高程度受到抑制。另外,可动梳齿电极的梳齿数越多,则可动梳齿电极越重,因此,为了达到期望的共振频率,不得不将可动梳齿电极的梳齿数控制得较少,存在难以得到大电容值这样的问题。与之相对地,在上下振动方式下对可动部设置可动梳齿电极的情况下,将可动梳齿电极设置在可动部的任意位置,增大的惯性矩均是恒定的,共振频率的降低量也是恒定的。从而,因设置可动梳齿电极而引起的共振频率的降低量比旋转反射镜方式小。从这一点来看,在上下振动方式下,与旋转反射镜方式相比,能够增多梳齿的数量,能够得到较大的电容值。从而,时刻检测精度提高,因此,能够比较容易地使可动部通过规定位置的时刻与驱动信号的下降时刻一致。
[0236]
另外,在滑动方式下,在电容值变为最大的时刻(电容微分值为0的时刻),可动部的速度变为最慢。当可动部的速度变慢时,电容微分值的时间变化减小,因此,时刻检测精度受到抑制。与之相对地,在上下振动方式下,在电容值变为最大的时刻(电容微分值为0的时刻),可动部的速度变为最快,因此,电容微分值的时间变化也增大,得到较高的时刻检测精度。从而,在上下振动方式下,与滑动方式相比,能够比较容易地使可动部通过规定位置的时刻与驱动信号的下降时刻一致。
[0237]
符号说明
[0238]
1a
……
光学模块,1b
……
mems致动器,2
……
反射镜单元,3
……
封装件,5
……
可动反射镜(可动部),5a
……
反射镜面,5b
……
反射镜支承部,6
……
固定反射镜,6a
……
反射镜面,7
……
反射镜器件,7a、7b
……
光通过部,8
……
光学功能构件,8a
……
表面,8b
……
背面,9
……
应力缓冲基板,11
……
基底(基部),11a
……
主面,11b
……
背面,12、12a
……
驱动部,13
……
第一弹性支承部,14
……
第二弹性支承部,15
……
致动器部,16、16a、16b、18、18a、18b
……
固定梳齿电极,16a、18a
……
固定梳齿(第一梳齿、第三梳齿),17、17a、17b、19、19a、19b
……
可动梳齿电极,17a、19a
……
可动梳齿(第二梳齿、第四梳齿),20
……
soi基板,21
……
支承层,22
……
器件层,23
……
中间层,31
……
支承体,31a
……
表面,33
……
引脚,33a
……
一端部,34
……
框体,34a
……
端面,34b
……
台阶面,35
……
光透过构件,51
……
配置部,51a
……
表面,52
……
框部,53
……
连结部,54
……
梁部,54a
……
内侧梁部,54b
……
外侧梁部,54c
……
连结梁部,71、72
……
电极焊盘,80
……
基板(基部),81
……
固定梳齿电极,82
……
可动梳齿电极,82a、82b
……
第二梳齿,83、84
……
固定梳齿电极,83a、84a
……
第一梳齿,91
……
梁(可动部),92、93
……
固定部,121
……
致动器驱动电路,122、122a
……
时刻检测电路,123、123a、123b
……
电流电压转换电路(tia),123a
……
放大器,123b
……
反馈电阻,123e
……
电容器,124
……
比较器,125
……
钳位电路,125a、125b
……
开关二极管,126
……
保护电路,126a、126b
……
二极管,127、128
……
软限幅器电路,127a、128a
……
开关二极管,127b、127c、128b、128c
……
电阻,129
……
移位量检测部,129a
……
积分电路,129b
……
放大器,130
……
电压生成电路,131、141
……
杆,132、142
……
第一连接构件,133、143
……
第二连接构件,133、144
……
中间构件,135、145
……
第一扭杆,136、146
……
第二扭杆,137、147
……
非线性缓冲弹簧,138、148
……
电极支承部,138a、148a
……
第一电极支承部,138b、148b
……
第二电极支承部,138c、148c
……
第三电极支承部,201
……
正弦波生成电路,202
……
可变电容,203
……
固定电容,204
……
运算电路,204a
……
运算放大器,204b
……
反馈电容,205
……
包络检波器,206
……
放大器,207
……
低通滤波器,208
……
模数转换器,211
……
电容,212
……
电阻,c
a1
……
重叠电容,c
a2
……
边缘电容,c1、c2
……
电容,f1、f2、f3
……
区域,gnd
……
基准电位线,h
……
包络,j1
……
电流信号,j1a、j1b
……
脉冲波,j2
……
反馈电流,j2a、j2b
……
脉冲波,j3、j4
……
电流,j5、j6
……
反馈电流,l1、l2、l3
……
直线,n1~n5
……
节点,pa、pb
……
饱和波形,pc
……
脉冲,pd
……
下降,pu
……
上升,r1、r2
……
轴线,ri
……
纹波,sa
……
正弦波信号,sb、sc
……
信号,t1~t4
……
时刻,v
……
正的恒定电位线,v
‑……
负的恒定电位线,vh……
恒定电压,va
……
反相输入端子电压,vi
……
输入信号,vin、vin1、vin2
……
驱动信号,vo
……
输出信号,vout
……
电容微分信号,ya、za
……
极大点,yb、zb
……
极小点,zc
……
中点。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。