1.本公开涉及锁具领域,特别涉及一种门锁装置及防盗门。
背景技术:
2.门锁装置是防盗门的重要组成部分,通常设置在防盗门的门板上,用于进行防盗门的控制。
3.目前的门锁装置除了能够通过手动进行开锁和上锁外,还能够自动进行开锁和上锁。这种门锁装置通常包括传动件和驱动机构,驱动机构用于驱动传动件,以实现开锁或上锁。
4.在驱动机构驱动传动件,进行开锁和上锁时,一般由驱动机构带动传动件沿着一个方向连续转动,并且在已经开锁或上锁后,驱动机构仍然向传动件输出扭矩。这是由于无法判断传动件是否转动到位,故采用了这种即使传动件已经无法转动,驱动机构仍持续向传动件输出扭矩的设计。但是这种设计,会影响驱动机构的寿命,并且造成了能源的浪费。
技术实现要素:
5.本公开实施例提供了一种门锁装置及防盗门,能够延长驱动机构的寿命,节约能源。所述技术方案如下:
6.一方面,本公开实施例提供了一种门锁装置,该门锁装置包括锁体、传动件、磁性件、驱动机构、磁敏角度传感器和控制器;
7.所述传动件的第一端与所述锁体相连,用于触发所述锁体解锁或上锁,所述磁性件位于所述传动件的第二端;
8.所述驱动机构与所述传动件相连,用于驱动所述传动件转动;
9.所述磁敏角度传感器与所述磁性件相对布置;
10.所述控制器与所述驱动机构和所述磁敏角度传感器分别相连,被配置为,基于所述磁敏角度传感器检测到的角度大小,控制所述驱动机构工作或停止工作。
11.可选地,所述磁敏角度传感器包括传感器主体和主板,所述传感器主体位于所述主板上,所述主板具有至少一个避让孔,所述避让孔位于所述传感器主体的侧方;
12.所述磁性件位于所述传动件第二端的端面中央,且与所述传感器主体相对;
13.所述传动件第二端的端面上具有至少一个凸柱,所述凸柱偏心布置,所述凸柱位于所述避让孔中,且所述凸柱至少部分位于所述主板远离所述磁性件的一侧。
14.可选地,所述主板具有两个所述避让孔,两个所述避让孔分别位于所述传感器主体的两侧;
15.所述传动件具有两个所述凸柱,两个所述凸柱关于所述传动件的轴心中心对称,两个所述凸柱分别位于两个所述避让孔中。
16.可选地,所述传动件第二端的端面中央具有凹槽,所述磁性件位于所述凹槽中。
17.可选地,所述驱动机构包括外壳、电机和减速齿轮组,所述电机和所述减速齿轮组
位于所述外壳中,所述减速齿轮组传动连接所述电机和所述传动件;
18.所述外壳的外表面具有容纳槽,所述主板位于所述容纳槽中。
19.可选地,所述传动件包括转杆和把手驱动轴,所述转杆的一端与所述锁体相连,另一端与所述把手驱动轴的一端同轴相连,所述把手驱动轴插装在所述减速齿轮组的输出齿轮中,所述把手驱动轴的另一端与所述磁性件相连。
20.可选地,所述把手驱动轴的外侧壁具有至少一个第一挡块;
21.所述输出齿轮呈环形,所述输出齿轮的内壁具有至少一个第二挡块,所述输出齿轮与所述把手驱动轴间隙配合,所述第一挡块和所述第二挡块沿所述输出齿轮的周向分布。
22.可选地,所述门锁装置还包括面板和把手,所述把手和所述驱动机构位于所述面板相反的两面,且均与所述面板相连,所述把手与所述凸柱相连。
23.可选地,所述把手与所述驱动机构相对的端面上具有插孔,所述插孔偏心布置,所述凸柱插接在所述插孔中。
24.另一方面,本公开实施例还提供了一种防盗门,该防盗门包括门板和如前一方面所述的门锁装置,所述门锁装置与所述门板相连。
25.本公开实施例提供的技术方案带来的有益效果至少包括:
26.通过在门锁装置中设置磁敏角度传感器、磁性件和控制器,将磁性件布置在传动件的第二端,将磁敏角度传感器与磁性件相对布置,磁性件可以随传动件的转动而转动。磁敏角度传感器与磁性件之间通过磁场相互作用,在传动件转动过程中,由磁敏角度传感器检测出传动件转过的角度,使得控制器能根据磁敏角度传感器检测到的角度大小,控制驱动机构工作或停止工作,避免驱动机构过度运转,有利于延长驱动机构的寿命,节约能源。
附图说明
27.为了更清楚地说明本公开实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
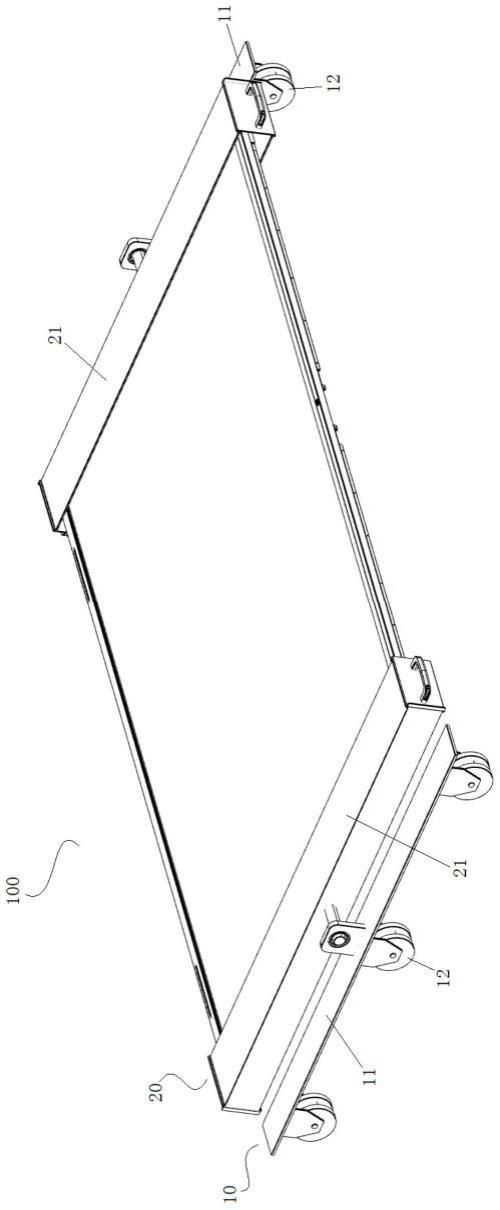
28.图1是本公开实施例提供的一种门锁装置的整体结构示意图;
29.图2是本公开实施例提供的一种门锁装置的整体结构示意图;
30.图3是本公开实施例提供的一种门锁装置的局部分解结构示意图;
31.图4是本公开实施例提供的一种磁敏角度传感器的装配示意图;
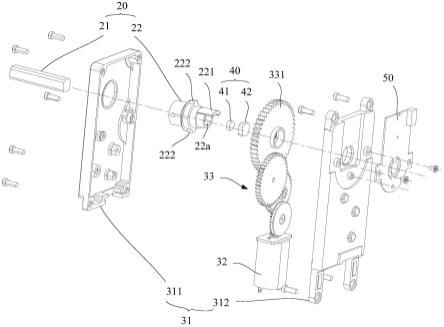
32.图5是本公开实施例提供的一种门锁装置的分解结构示意图;
33.图6是本公开实施例提供的另一种门锁装置的结构示意图;
34.图7是图6所示门锁装置的磁敏角度传感器的装配示意图;
35.图8是本公开实施例提供的一种防盗门的控制方法的流程图。
具体实施方式
36.为使本公开的目的、技术方案和优点更加清楚,下面将结合附图对本公开实施方式作进一步地详细描述。
37.除非另作定义,此处使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开专利申请说明书以及权利要求书中使用的“第一”、“第二”、“第三”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“包括”或者“包含”等类似的词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则所述相对位置关系也可能相应地改变。
38.图1和图2是本公开实施例提供的一种门锁装置的整体结构示意图。如图1和图2所示,该门锁装置包括锁体10、传动件20和驱动机构30。
39.传动件20的第一端与锁体10相连,传动件20用于触发锁体10解锁或上锁。锁体10具有解锁状态和上锁状态,通过传动件20的转动,就能够触发锁体10解锁,使锁体10从上锁状态切换为解锁状态,或是触发锁体10上锁,使锁体10从解锁状态切换为上锁状态。
40.驱动机构30与传动件20相连。驱动机构30用于驱动传动件20转动,以触发锁体10解锁或上锁。
41.图3是本公开实施例提供的一种门锁装置的局部分解结构示意图。如图3所示,该门锁装置还包括磁敏角度传感器50、磁性件40和控制器(未示出)。磁性件40位于传动件20的第二端。
42.磁敏角度传感器50与磁性件40相对布置。
43.控制器与驱动机构30和磁敏角度传感器50分别相连,控制器被配置为,基于磁敏角度传感器50检测到的角度大小,控制驱动机构30工作或停止工作。
44.通过在门锁装置中设置磁敏角度传感器50、磁性件40和控制器,将磁性件40布置在传动件20的第二端,将磁敏角度传感器50与磁性件40相对布置,磁性件40可以随传动件20的转动而转动。磁敏角度传感器50与磁性件40之间通过磁场相互作用,在传动件20转动过程中,由磁敏角度传感器50检测出传动件20转过的角度,使得控制器能根据磁敏角度传感器50检测到的角度大小,控制驱动机构30工作或停止工作,避免驱动机构30过度运转,有利于延长驱动机构30的寿命,节约能源。
45.如图3所示,驱动机构30包括外壳31、电机32和减速齿轮组33,电机32和减速齿轮组33位于外壳31中。减速齿轮组33传动连接电机32和传动件20。
46.减速齿轮组33包括多个齿轮,其中至少包括一个输入齿轮和一个输出齿轮331,输入齿轮套在电机32的转轴上,输出齿轮331套在传动件20上。电机32在转动时,通过减速齿轮组33将动力传递到传动件20,使传动件20转动。
47.控制器与电机32相连,以控制电机32工作,例如控制电机32的启停、转向、转速。
48.外壳31起到保护电机32和减速齿轮组33的作用,避免异物影响减速齿轮组33的转动。通过外壳31将电机32和减速齿轮组33组装为一个整体,也便于门锁装置的组装。
49.可选地,外壳31可以包括顶盖311和底盖312,顶盖311和底盖312相对合拢,形成容纳电机32和减速齿轮组33的空间。
50.示例性地,顶盖311和底盖312通过螺钉相连。
51.图4是本公开实施例提供的一种磁敏角度传感器的装配示意图。如图4所示,外壳31的外表面具有容纳槽312a,磁敏角度传感器50位于该容纳槽312a中。
52.容纳槽312a位于底盖312上,也就是外壳31靠近面板70的外表面。通过容纳槽312a收容磁敏角度传感器50,方便磁敏角度传感器50的安装,也能够为磁敏角度传感器50提供保护,避免磁敏角度传感器50受损。容纳槽312a还能够对磁敏角度传感器50进行限制,避免磁敏角度传感器50松动而影响角度检测的准确性。
53.如图4所示,容纳槽312a的槽底还可以具有连接孔312b,磁敏角度传感器50可以通过螺钉与连接孔312b的配合,固定连接在外壳31上。
54.如图3所示,传动件20包括转杆21和把手驱动轴22,转杆21的一端与锁体10相连,另一端与把手驱动轴22的一端同轴相连。把手驱动轴22插装在减速齿轮组33的输出齿轮331中,把手驱动轴22的另一端与磁性件40相连。
55.减速齿轮组33包括多个齿轮,电机32通过多个齿轮形成的减速齿轮组33能够输出较大的扭矩。其中减速齿轮组33的输出齿轮331用于与把手驱动轴22相连,以带动把手驱动轴22转动。将传动件20设置成转杆21和把手驱动轴22,把手驱动轴22插装到输出齿轮331中,能够与驱动机构30装配到一起,转杆21与锁体10装配到一起,有利于门锁装置的组装。
56.转杆21可以呈多边形,把手驱动轴22的一端可以具有多边形的插孔,转杆21插接在该插孔中,从而与把手驱动轴22在周向上无法相对转动。
57.图5是本公开实施例提供的一种门锁装置的分解结构示意图。如图5所示,把手驱动轴22的外侧壁具有至少一个第一挡块222。输出齿轮331呈环形,输出齿轮331的内壁具有至少一个第二挡块3311。输出齿轮331套在把手驱动轴22外,与把手驱动轴22间隙配合,第一挡块222和第二挡块3311沿输出齿轮331的周向分布。
58.由于输出齿轮331与把手驱动轴22是间隙配合的,因此输出齿轮331与把手驱动轴22能够发生相对转动。又由于把手驱动轴22的外侧壁有第一挡块222,输出齿轮331的内壁有第二挡块3311,因此在输出齿轮331与把手驱动轴22相对转动一定角度至第一挡块222和第二挡块3311接触后,在不改变转动方向的情况下,输出齿轮331与把手驱动轴22中的一个能够带着另一个继续转动。在转向发生变化时,第一挡块222与第二挡块3311分离,输出齿轮331与把手驱动轴22能够相对转动。
59.在本公开实施例中,把手驱动轴22的外侧壁具有两个第一挡块222,两个第一挡块222关于把手驱动轴22的轴心中心对称布置。输出齿轮331的内壁具有两个第二挡块3311,两个第二挡块3311关于输出齿轮331的轴心中心对称布置。
60.如图4所示,磁敏角度传感器50包括传感器主体51和主板52,传感器主体51位于主板52上,主板52具有至少一个避让孔52a,避让孔52a位于传感器主体51的侧方。主板52可以通过螺钉固定连接在外壳31上。
61.磁性件40位于传动件20第二端的端面中央,且与传感器主体51相对。
62.传动件20第二端的端面上具有至少一个凸柱221,凸柱221偏心布置,凸柱221位于避让孔52a中,且凸柱221至少部分位于主板52远离磁性件40的一侧。
63.磁性件40布置在把手驱动轴22远离转杆21的一端的端面中央,在把手驱动轴22转动时随把手驱动轴22一起转动。
64.如图4所示,传动件20第二端的端面中央,也就是把手驱动轴22远离转杆21的一端
的端面中央,具有凹槽22a,磁性件40位于凹槽22a中。
65.通过设置凹槽22a使磁性件40安装更加牢固,并且凹槽22a能起到限位的作用,避免磁性件40与把手驱动轴22发生相对转动而导致磁敏角度传感器50测到的结果不准确。
66.磁性件40可以包括磁钢41和磁钢套42,磁钢41位于磁钢套42中。磁钢套42可以呈棱柱形,把手驱动轴22远离转杆21的一端的端面中央的凹槽22a也是棱柱形,使得磁钢套42能与凹槽22a形成配合,避免磁性件40发生转动。
67.在图4所示示例中,把手驱动轴22远离转杆21的一端具有一个凸柱221。该凸柱221用于与把手80形成配合,使得把手驱动轴22和把手80能一起转动。主板52的避让孔52a使得凸柱221能够穿过主板52与把手80相连,并且不影响把手驱动轴22的转动。
68.避让孔52a还能够限制把手驱动轴22的转动角度,在把手驱动轴22转动至凸柱221与避让孔52a的孔壁接触后,限制把手驱动轴22进一步转动。
69.在本公开实施例中,避让孔52a呈弧形,且弧形的圆心位于把手驱动轴22的轴心上。
70.图6是本公开实施例提供的另一种门锁装置的结构示意图。该门锁装置与图5所示门锁装置的区别在于主板52和把手驱动轴22。图7是图6所示门锁装置的磁敏角度传感器的装配示意图。如图7所示,该门锁装置中,主板52具有两个避让孔52a,两个避让孔52a分别位于传感器主体51的两侧;传动件20具有两个凸柱221,两个凸柱221关于传动件20的轴心中心对称,两个凸柱221分别位于两个避让孔52a中。该示例中,通过设置对称的两个凸柱221来与把手80形成配合,使把手80与把手驱动轴22的配合更稳定。
71.如图2所示,该门锁装置还包括面板70和把手80。把手80和驱动机构30位于面板70相反的两面。把手80和驱动机构30均与面板70相连。把手80能够相对面板70转动,把手80与传动件20的一端相连,使得能够通过把手80旋拧传动件20,控制锁体10开锁或上锁。
72.驱动机构30收容于面板70中。磁敏角度传感器50位于驱动机构30和面板70之间。
73.门锁装置在安装时,锁体10位于防盗门的门板内,面板70与门板相连。磁敏角度传感器50、磁性件40和驱动机构30均可以收容于面板70中。驱动机构30与面板70相连,磁性件40和磁敏角度传感器50均布置在驱动机构30和面板70之间,使得在需要对防盗门进行维修时,打开面板70就能够对磁性件40和磁敏角度传感器50进行维修或更换。
74.此外,控制器也可以设置在面板70中。面板70上还可以设置有人机交互结构,例如显示屏、按键、指纹识别模组等,以方便用户使用。
75.如图5所示,把手80与驱动机构30相对的端面上具有插孔82a,插孔82a偏心布置,凸柱221插接在插孔82a中。
76.把手80可以包括持握部81和转轴部82,持握部81与转轴部82的一端相连,插孔82a可以位于持握部81的另一端的端面上。
77.在组装门锁装置时,将凸柱221插入到把手80端面的插孔82a中,这样在转动把手80时,把手80就能够带动传动件20转动,在转动传动件20时,也能带动把手80转动。
78.把手80与面板70之间还可以设置有复位件83,例如扭簧,使得在松开把手80时,把手80能够自动复位。
79.本公开实施例还提供了一种防盗门,该防盗门既可以是左开门,也可以是右开门。该防盗门包括门板和如图1~图7所示的任一种门锁装置,门锁装置与门板相连。例如,锁体
10可以位于门板内,并与门板相连,面板70位于门板外,并与门板相连,驱动机构30、磁性件40、磁敏角度传感器50和控制器均可以位于面板70中。
80.该防盗门中,通过在门锁装置中设置磁敏角度传感器50、磁性件40和控制器,将磁性件40布置在传动件20的第二端,将磁敏角度传感器50与磁性件40相对布置,磁性件40可以随传动件20的转动而转动。磁敏角度传感器50与磁性件40之间通过磁场相互作用,在传动件20转动过程中,由磁敏角度传感器50检测出传动件20转过的角度,使得控制器能根据磁敏角度传感器50检测到的角度大小,控制驱动机构30工作或停止工作,避免驱动机构30过度运转,有利于延长驱动机构30的寿命,节约能源。
81.图8是本公开实施例提供的一种防盗门的控制方法的流程图。该控制方法用于控制前述的防盗门。如图8所示,该控制方法包括:
82.在步骤s11中,进行身份验证。
83.进行身份验证的方式包括但不限于身份卡验证、钥匙验证、密码验证、指纹验证、掌纹验证、虹膜验证。
84.若身份验证通过,则执行后续步骤s12;若身份验证不通过,则结束流程。
85.在步骤s12中,控制驱动机构30驱动传动件20沿第一方向转动至预设角度后,控制驱动机构30停止工作,锁体10解锁。
86.步骤s11~步骤s12用于控制防盗门解锁。即在进行步骤s11之前,锁体10处于上锁状态。由于驱动机构30在驱动传动件20转动至使一个磁敏角度传感器50被触发后,锁体10就解锁了,此时驱动机构30停止工作,停止了继续向传动件20输出扭矩,从而能够避免驱动机构30受损,也避免了多余的能量消耗,达到了延长使用寿命,节省了能源。
87.在锁体10解锁后,还可以有步骤s13,通过驱动机构30控制传动件20沿相反的第二方向转动,使驱动机构30复位。
88.在需要进行解锁时,也可以手动解锁,即用户直接拧动把手80,由把手80带动传动件20,使锁体10解锁。在解锁后,松开把手80,把手80在复位件83的作用下复位。
89.以上所述仅为本公开的可选实施例,并不用以限制本公开,凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。