1.本实用新型属于新能源汽车技术领域,具体是一种新能源汽车充电用机器人。
背景技术:
2.新能源汽车是指采用非常规的车用燃料作为动力来源(或使用常规的车用燃料、采用新型车载动力装置),综合车辆的动力控制和驱动方面的先进技术,形成的技术原理先进、具有新技术、新结构的汽车,新能源汽车包括四大类型混合动力电动汽车(hev)、纯电动汽车(bev,包括太阳能汽车)、燃料电池电动汽车(fcev)、其他新能源(如超级电容器、飞轮等高效储能器)汽车等,提倡新能源汽车是为了应付环保和石油危机需要,减少或放弃燃烧传统的汽油或柴油驱动内燃机的现时主流车型。
3.现有的新能源汽车在进行充电时都需要人工充电,即充电人员将充电枪从充电桩上取下,然后插入到汽车的充电口中,操作不方便,且容易出现操作不规范的现象。
技术实现要素:
4.本实用新型的目的在于克服现有技术的缺陷,提供一种新能源汽车充电用机器人。
5.为实现上述目的,本实用新型采用了如下技术方案:
6.一种新能源汽车充电用机器人,包括机器人主体,所述机器人主体下方设置有万向轮,所述机器人主体上方设置有机械手,所述机械手的前端安装有用于夹持充电头的夹爪;
7.所述机器人主体上方安装有有对中感应器,所述机器人主体上方位于所述机械手的一侧设置有控制器,所述控制器的前端安装有激光测距仪。
8.在一种可能的实现方式中,所述对中感应器与所述机械手的中心处于同一直线上。
9.在一种可能的实现方式中,所述机器人主体上方还安装有报警装置,所述报警装置采用蜂鸣报警器。
10.在一种可能的实现方式中,所述控制器顶部安装有图像分析仪。
11.在一种可能的实现方式中,所述机器人主体上表面位于所述控制器的下方处开设有滑槽,所述滑槽沿所述机器人主体的宽度方向开设,所述控制器的底部安装有调节滑座,所述调节滑座滑动安装在所述滑槽内。
12.在一种可能的实现方式中,所述滑槽内部沿长度方向贯穿设置有丝杆,所述机器人主体内部安装有电机,所述丝杆的一端与所述电机的输出轴连接,所述调节滑座内嵌设有丝杠螺母,所述丝杆穿过所述丝杠螺母。
13.在一种可能的实现方式中,所述滑槽共设置有两个,两个所述滑槽关于所述控制器的竖直中心线相互对称。
14.在一种可能的实现方式中,所述调节滑座的截面呈“凸”型结构。
15.本实用新型中,通过在机器人主体上方安装有有对中感应器,通过对中感应器可以使机器人主体感应汽车充电口的横向位置,保证机械手将充电枪准确无误的插入充电口内,而控制器的前端安装有激光测距仪,通过激光测距仪可以感应车辆与机器人主体的间距,保证充电枪能够插入到位,从而保证了充电的顺利进行,这样的结构设置使得汽车充电方便快捷,且操作规范;
16.本实用新型中,机器人主体上表面位于控制器的下方处开设有滑槽,控制器的底部安装有调节滑座,调节滑座滑动安装在滑槽内,这样的结构设置使得当电机在运行时,丝杆转动,而调节滑座中嵌设有与丝杆适配的丝杠螺母,因此当丝杆转动时可以带动调节滑座进行滑动调节位置,从而使整个控制器调整位置,方便进行车辆附近的图像采。
附图说明
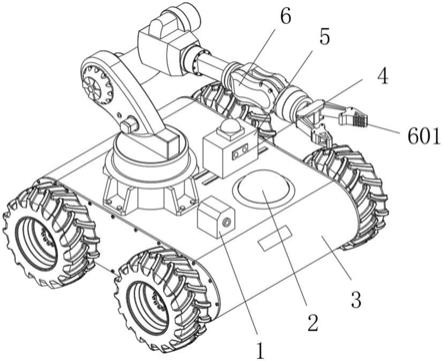
17.图1是本实用新型的整体结构示意图;
18.图2是本实用新型的俯视图;
19.图3是本实用新型中控制器结构示意图。
20.附图标记:1、对中感应器;2、报警装置;3、机器人主体;4、激光测距仪;5、控制器;6、机械手;601、夹爪;7、滑槽;8、丝杆;9、图像分析仪;10、调节滑座;11、丝杠螺母。
具体实施方式
21.以下结合附图1-3,进一步说明本实用新型一种新能源汽车充电用机器人的具体实施方式。本实用新型一种新能源汽车充电用机器人不限于以下实施例的描述。
22.实施例1:
23.本实施例给出一种新能源汽车充电用机器人的具体结构,如图1-2所示,包括机器人主体3,机器人主体3下方设置有万向轮,机器人主体3上方设置有机械手6,机械手6的前端安装有用于夹持充电头的夹爪601;
24.机器人主体3上方安装有有对中感应器1,机器人主体3上方位于机械手6的一侧设置有控制器5,控制器5的前端安装有激光测距仪4。
25.对中感应器1与机械手6的中心处于同一直线上。
26.机器人主体3上方还安装有报警装置2,报警装置2采用蜂鸣报警器。
27.控制器5顶部安装有图像分析仪9。
28.通过采用上述技术方案:
29.该装置在使用时,首先,机器人主体3接收停车场的充电需求信息,机器人主体3启动向待充电车辆处行走,在到达预定位置后,机器人主体3上的机械手6运行,夹取充电桩上的充电枪,然后向图像分析仪9采集并分析车辆的充电位置,通过控制器5控制机器人主体3向车辆的充电位置附近移动,再通过激光测距仪4和对中感应器1感应充电枪与充电口的对中情况以及距离,再通过控制器5控制机器人主体3移动,使充电枪插入汽车充电口内进行充电;
30.该装置通过在机器人主体3上方安装有有对中感应器1,通过对中感应器1可以使机器人主体3感应汽车充电口的横向位置,保证机械手6将充电枪准确无误的插入充电口内,而控制器5的前端安装有激光测距仪4,通过激光测距仪4可以感应车辆与机器人主体3
的间距,保证充电枪能够插入到位,从而保证了充电的顺利进行,这样的结构设置使得汽车充电方便快捷。
31.机器人主体3上方还安装有报警装置2,报警装置2采用蜂鸣报警器,用于在出现危险情况时发出警报。
32.控制器5顶部安装有图像分析仪9。
33.实施例2:
34.本实施例给出一种新能源汽车充电用机器人的具体结构,如图1-3所示,包括机器人主体3,机器人主体3下方设置有万向轮,机器人主体3上方设置有机械手6,机械手6的前端安装有用于夹持充电头的夹爪601;
35.机器人主体3上方安装有有对中感应器1,机器人主体3上方位于机械手6的一侧设置有控制器5,控制器5的前端安装有激光测距仪4。
36.对中感应器1与机械手6的中心处于同一直线上。
37.机器人主体3上方还安装有报警装置2,报警装置2采用蜂鸣报警器。
38.控制器5顶部安装有图像分析仪9。
39.机器人主体3上表面位于控制器5的下方处开设有滑槽7,滑槽7沿机器人主体3的宽度方向开设,控制器5的底部安装有调节滑座10,调节滑座10滑动安装在滑槽7内。
40.滑槽7内部沿长度方向贯穿设置有丝杆8,机器人主体3内部安装有电机,丝杆8的一端与电机的输出轴连接,调节滑座10内嵌设有丝杠螺母11,丝杆8穿过丝杠螺母11。
41.滑槽7共设置有两个,两个滑槽7关于控制器5的竖直中心线相互对称。
42.调节滑座10的截面呈“凸”型结构。
43.通过采用上述技术方案:
44.该装置中机器人主体3上表面位于控制器5的下方处开设有滑槽7,控制器5的底部安装有调节滑座10,调节滑座10滑动安装在滑槽7内,这样的结构设置使得当电机在运行时,丝杆8转动,而调节滑座10中嵌设有与丝杆8适配的丝杠螺母11,因此当丝杆8转动时可以带动调节滑座10进行滑动调节位置,从而使整个控制器5调整位置,方便进行车辆附近的图像采集。
45.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。