一种同步辐射x射线干涉光刻自适应曝光装置及方法
技术领域
1.本发明涉及曝光装置,更具体地涉及一种同步辐射x射线干涉光刻自适应曝光装置及方法。
背景技术:
2.极紫外光刻技术作为下一代光刻技术,被半导体行业赋予了拯救摩尔定律的使命。极紫外光刻胶是制造集成电路的关键材料,其性能直接影响到集成电路芯片的性能。极紫外光刻胶的核心曝光性能主要包含三个方面:灵敏度、分辨率和边缘粗糙度。对这些曝光性能的表征是极紫外光刻胶研发的必要条件和实现极紫外光刻胶配方优化的重要环节。x射线干涉光刻(xil) 是利用两束或多束相干x光束的干涉条纹对光刻胶进行曝光的新型先进微纳加工技术,可以开展几十甚至十几个纳米周期的纳米结构加工。干涉光刻的原理是利用掩模光栅把一束光束分成多束相干光束,并在光刻胶处产生干涉条纹使光刻胶曝光,曝光图形即可被记录下来。通过检测曝光图形的质量即可表征光刻胶的性能。目前干涉光刻技术是唯一一种一次曝光即可实现光刻胶三种曝光性能同时检测的实验技术。
3.现有的干涉光刻技术的原理图如图1所示,假设掩模光栅的周期为d,入射光波长为λ、光束衍射角为θ,那么根据光栅方程有:
4.d*sinθ=n*λ
ꢀꢀꢀꢀꢀꢀ
(1)
5.其中,n为衍射级次。
6.假设掩膜光栅的宽度为d,且两块掩膜光栅的中心距离为2d,那么两块光栅的
±
1级衍射光的干涉区域宽度为d,且产生干涉条纹的位置距离掩膜光栅的垂直工作距离l为:
7.l=d/tanθ
ꢀꢀ
(2)
8.由(1)、(2)式可知,
[0009][0010]
其中,n为衍射级次,d为掩膜光栅的宽度,λ为入射光波长,d为掩模光栅的周期。
[0011]
对于极紫外光,其波长为13.5nm,若掩膜光栅的宽度为200μm,周期为80nm,此时对于光栅的
±
1级衍射,产生干涉条纹的位置距离掩膜光栅的垂直距离l为1.17mm,考虑到小周期掩膜光栅的加工难度,若掩膜光栅的宽度减小到100μm,那么产生干涉条纹的位置距离掩膜光栅的垂直距离l则相应的减小到0.58mm。
[0012]
随着技术的发展,对掩膜光栅的周期提出了更高的要求,光栅周期通常要求小于100nm,通过上述计算可知,产生干涉条纹的位置距离掩膜光栅的垂直距离大约为几百微米。由于极紫外光的传播特性,整个曝光系统需要放置在高真空环境内,这就对距离测量与整个曝光系统的稳定性提出了更高的要求。
[0013]
现有的曝光系统中,掩模光栅与样品分别位于各自的调节机构上,掩模光栅做一维运动,来调节其与样品间的距离,样品做二维运动,来改变掩模光栅在样品上的曝光位置。样品光栅的运动方向垂直于样品的运行方向。虽然现有的系统可以满足垂直距离为几
百微米的要求,但是有两个缺点:第一个缺点是稳定性较差,主要体现在掩模光栅与样品间的相对位移,曝光时如果掩模光栅与样品间不是相对静止,会影响曝光质量。这是因为现有的曝光系统中光栅与样品并没有硬连接,换句话说两者之间没有接触,靠的是系统整体的稳定性来尽量保证减小二者之间的相对位移,系统整体稳定性好的话,相对位移就小,系统整体稳定性差的话,相对位移就大。第二个缺点是样品运动的轨道很难保证完全垂直于掩模光栅,因此当改变样品上的曝光区域时,就相当与改变了样品与掩膜光栅间的距离,这样就不能完全满足上文中公式(3)的要求。
技术实现要素:
[0014]
本发明的目的在于提供一种同步辐射x射线干涉光刻自适应曝光装置及方法,以在曝光时避免光栅与样品间的相对位移,并在调节曝光区域时保证光栅与样品间的距离满足要求。
[0015]
为了实现上述目的,本发明提供一种同步辐射x射线干涉光刻自适应曝光装置,包括可拆卸地安装在一起的离线距离调整组件和在线自适应曝光组件;所述离线距离调整组件包括光栅支架、安装于光栅支架上的掩膜光栅、插设于光栅支架中的距离调节杆、以及用于将所述距离调节杆锁紧在光栅支架的锁紧螺丝;所述在线自适应曝光组件包括与距离调节杆的面向掩模光栅的一端挤压配合的待测样品以及与离线距离调整组件的背离掩模光栅的一侧可拆卸地连接的力传感器,所述待测样品安装于样品支架上,所述力传感器设置为测量待测样品在垂直于待测样品所在平面的方向受到的压力。
[0016]
所述距离调节杆的延伸方向垂直于掩膜光栅所在的平面,且调节杆的两端穿出所述光栅支架。
[0017]
所述锁紧螺丝的延伸方向平行于掩膜光栅所在的平面。
[0018]
所述光栅支架的外围设有供距离调节杆穿过的3个螺孔,且所述距离调节杆是与所述螺孔配合的螺杆。
[0019]
所述光栅支架的中心设有通光孔,且一侧端面上对应于通光孔的位置设有掩膜光栅衬底,所述掩膜光栅制备于所述掩膜光栅衬底上。
[0020]
所述样品支架与一样品驱动电机相连,所述样品驱动电机设置为驱动样品支架沿平行于待测样品所在平面的二维方向运动。
[0021]
所述力传感器的远离所述离线距离调整组件的一侧通过连接固定块与光栅驱动电机相连,所述光栅驱动电机设置为通过所述力传感器驱动所述离线距离调整组件的光栅支架沿垂直于待测样品所在平面的方向移动。
[0022]
所述待测样品制备于样品衬底上,所述样品衬底固定于样品固定板上,且样品固定板的远离待测样品的一侧安装有多个弹簧,并通过弹簧与样品支架连接。
[0023]
所述弹簧的数量为3个,3个弹簧均匀分布在样品固定板上。
[0024]
另一方面,本发明提供一种同步辐射x射线干涉光刻自适应曝光方法,包括:
[0025]
s0:提供上文所述的同步辐射x射线干涉光刻自适应曝光装置;
[0026]
s1:将所述同步辐射x射线干涉光刻自适应曝光装置的离线距离调整组件安装在一个固定夹具上,利用离线距离调整组件进行离线距离调节和位置锁紧;
[0027]
s2:将所述同步辐射x射线干涉光刻自适应曝光装置的离线距离调整组件与在线
自适应曝光组件安装在一起,放入真空腔体内;
[0028]
s3:驱动光栅支架向靠近待测样品的方向移动,直至三个距离调节杆全部接触到待测样品,此时停止驱动光栅支架,进行待测样品的在线曝光;
[0029]
s4:在曝光结束后,驱动光栅支架向远离待测样品的方向移动,驱动样品支架变换位置,并回到步骤s3,直到待测样品测量完成。
[0030]
本发明的同步辐射x射线干涉光刻自适应曝光装置通过在曝光时三个距离调节杆与待测样品的挤压配合实现了掩模光栅与待测样品之间的配合,通过摩擦力控制二者间的相对位移,几乎可以认为在曝光时二者之间是相对静止的,受系统整体稳定性的影响非常小。此外,本发明的同步辐射x射线干涉光刻自适应曝光装置通过三个距离调节杆来调节光栅与样品间的距离,即便样品运动的轨道与掩膜光栅不平行,曝光时也能保证光栅与样品间的距离满足要求。
附图说明
[0031]
图1是现有的干涉光刻技术的原理图。
[0032]
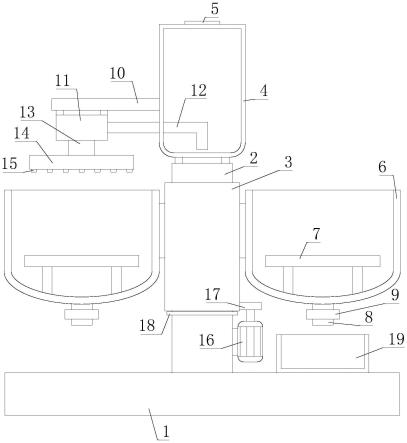
图2是根据本发明的一个实施例的同步辐射x射线干涉光刻自适应曝光装置的整体结构示意图。
[0033]
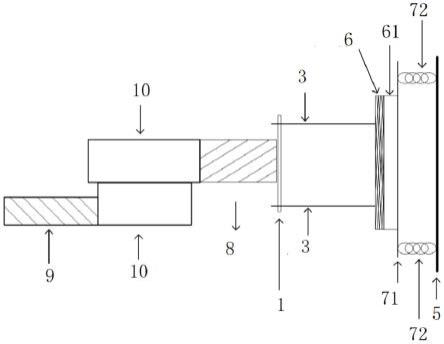
图3和图4是根据本发明的一个实施例的同步辐射x射线干涉光刻自适应曝光装置的离线距离调整组件的结构示意图,其中,图3示出了离线距离调整组件的正面图,图4示出了离线距离调整组件的侧视截面图。
具体实施方式
[0034]
如图2-图4所示为根据本发明的一个实施例的同步辐射x射线干涉光刻自适应曝光装置,其包括可拆卸地安装在一起的离线距离调整组件和在线自适应曝光组件。
[0035]
如图3和图4所示,所述离线距离调整组件用于进行掩膜光栅2与待测样品的离线距离调整,其包括光栅支架1、安装于光栅支架1上的掩膜光栅2、插设于光栅支架1中的距离调节杆3、以及用于将所述距离调节杆3 锁紧在光栅支架1的锁紧螺丝4。
[0036]
其中,距离调节杆3的延伸方向垂直于掩膜光栅2所在的平面,且调节杆3的两端穿出所述光栅支架1。锁紧螺丝4的延伸方向平行于掩膜光栅2 所在的平面。
[0037]
掩模光栅2固定在光栅支架1的中心处,光栅支架1的外围设有供距离调节杆3穿过的3个螺孔,3个螺孔平均分布在掩模光栅2的外围。距离调节杆3是与光栅支架1的螺孔配合的螺杆,其在长度调整好后,通过锁紧螺丝4锁紧固定在光栅支架上。
[0038]
光栅支架1的中心设有通光孔11,且一侧端面上对应于通光孔的位置设有掩膜光栅衬底21,所述掩膜光栅2制备于所述掩膜光栅衬底21上。所述掩膜光栅衬底21优选为sin衬底,掩模光栅制备在sin衬底上,光栅支架1的中心需要开通孔以确保上游的euv光能照射到掩模光栅上,光栅支架1上固定掩模光栅的位置需要开槽,开槽深度与掩膜光栅衬底21的厚度相同,最终利用胶将掩膜光栅衬底21粘贴至支架上。
[0039]
光栅支架1的整体外形没有特殊要求。掩膜光栅2可以是方形,但是在本实施例中,考虑到三个调节杆的安装,光栅支架1的整体外形是圆形,以便预留距离调节杆3的安装位置。
[0040]
在本实施例中,将光栅支架1的安装所述掩膜光栅2的一侧端面定义为正面,因此,距离调节杆3的零刻度设置在掩模光栅2所在的平面,距离调节杆3就是从光栅支架1的背面穿过光栅支架1,距离调节杆3超出光栅支架1的正面的距离就是掩模光栅的垂直工作距离(即上述公式(3)计算所得的垂直工作距离l)。并且,每个距离调节杆3超出光栅支架1的正面的距离均需要调节为掩模光栅的垂直工作距离,这样就可以利用这三个距离调节杆3的端点定义一个平面,所定义的平面即为样品曝光时所在的平面。
[0041]
由此,在离线距离调节时,可以利用千分尺(或游标卡尺)实时测量距离调节杆3超出光栅支架1的正面的距离,直至该距离为掩模光栅的垂直工作距离,此时调整完成,利用距离调节杆3旁边的锁紧螺丝4将距离调节杆3的位置锁紧。其中,千分尺(或游标卡尺)不固定在本发明的同步辐射 x射线干涉光刻自适应曝光装置上。
[0042]
在离线距离调整完成后即可将离线距离调整组件与在线自适应曝光组件安装在一起,放入真空腔体内,以在之后进行在线曝光。
[0043]
再请参见图2,所述在线自适应曝光组件包括与距离调节杆3的面向掩模光栅2的一端挤压配合的待测样品6以及与离线距离调整组件的背离掩模光栅2的一侧可拆卸地连接的力传感器8,所述待测样品6安装于样品支架5上。所述样品支架5与一样品驱动电机(图未示)相连,样品驱动电机设置为驱动样品支架5沿平行于待测样品6所在平面的二维方向运动。
[0044]
所述同步辐射装置非常庞大,光源发出的光平行与地面传输,为了保证光束的效率,一般不会将光路设计为垂直向下照射样品,或倾斜照射样品,正常都是水平入射至样品,因此,所述待测样品6正常都是竖直设置。
[0045]
其中,待测样品6为光刻胶,其制备于样品衬底61上,光刻胶为一层几十纳米的薄膜,没有衬底的话这层薄膜很难自己支撑,因此需要一层样品衬底6做支撑。此外,所述样品衬底61固定于样品固定板71上。样品固定板71的远离待测样品6的一侧安装有多个弹簧72,并通过弹簧72与样品支架5连接。在本实施例中,所述弹簧72的数量为3个,3个弹簧72均匀分布在样品固定板71上(靠近外边缘,三个弹簧之间的夹角均为120
°
)。弹簧72的强度在满足调整需求的同时不能压碎样品衬底61。
[0046]
所述力传感器8的远离所述离线距离调整组件的一侧通过连接固定块 10与光栅驱动电机9相连。其中,连接固定块10可以具有配重功能,光栅驱动电机9设置为通过所述力传感器8驱动所述离线距离调整组件的光栅支架1沿垂直于待测样品6所在平面的方向移动,所述力传感器8设置为测量待测样品6在垂直于待测样品6所在平面的方向受到的压力。由此,通过光栅驱动电机9驱动光栅支架1向靠近待测样品6的方向移动,直至三个距离调节杆3全部接触到涂有待测样品6的样品衬底61(即接触到待测样品6),此时光栅驱动电机9停止工作,进行待测样品6的在线曝光。其中,当力传感器8上的数值达到预定阈值时,判断为距离调节杆3全部接触到样品衬底 61,此时光栅驱动电机9停止工作,开始曝光。
[0047]
所述力传感器8测量的是三个距离调节杆3对待测样品6的压力之和,设备调试时可以通过观察三个弹簧72的形变来确定力传感器的预定阈值,预定阈值和弹簧的强度等参数相关,需要通过设备调试时的具体数值来确定。在电机驱动掩模光栅靠近样品固定板的过程中,三个弹簧72均产生明显的形变后光栅驱动电机9停止驱动,此时力传感器8测量的数值即可设定为正常曝光时力传感器8的预定阈值。
[0048]
在曝光结束后,利用所述光栅驱动电机9驱动光栅支架1向远离待测样品6的方向移动,利用样品驱动电机驱动样品支架5变换位置。所述光栅驱动电机9与样品驱动电机不是同一组电机,掩膜光栅2的运动方向与待测样品6的运动方向相垂直,因此,光栅驱动电机9是一个一维电机,其运动方向为靠近或远离待测样品6。样品驱动电机包括两个彼此垂直的一维电机,在平行于待测样品6所在平面做二维运动,以改变待测样品6上的曝光位置,从而改变衬底上光刻胶的曝光区域,进行下一次曝光。待测样品6曝光时,通过三个弹簧72可以将涂有待测样品6的样品衬底61压紧至三个距离调节杆3上,这样有两点优势:一是涂有待测样品6的样品衬底61压紧至三个距离调节杆3上,通过摩擦力可以最大程度的减小掩膜光栅2与待测样品6之间的相对震动,有利于提升曝光系统的稳定性,获得高质量的曝光图形;二是在有一定压力施加的情况下,三个弹簧72可以自适应地调节每个弹簧的形变量,使涂有待测样品6的样品衬底61完全紧贴三个距离调节杆3,这就意味着待测样品6处于由3个距离调节杆3定义的平面上,保证了待测光刻胶平面与掩模光栅的平行性。
[0049]
基于上文所述的同步辐射x射线干涉光刻自适应曝光装置,所实现的同步辐射x射线干涉光刻自适应曝光方法,包括:
[0050]
步骤s0:提供上文所述的同步辐射x射线干涉光刻自适应曝光装置;
[0051]
步骤s1:将离线距离调整组件安装在一个固定夹具上,利用离线距离调整组件进行离线距离调节和位置锁紧;
[0052]
离线距离调整组件的具体结构如上文所述。
[0053]
在步骤s1中,在进行离线距离调节时,利用千分尺(或游标卡尺) 实时测量距离调节杆3超出光栅支架1的正面的距离,直至距离调节杆3超出光栅支架1的正面的距离均为掩模光栅的垂直工作距离,此时调整完成,利用距离调节杆3旁边的锁紧螺丝4将距离调节杆3的位置锁紧。
[0054]
步骤s2:将离线距离调整组件与在线自适应曝光组件安装在一起,放入真空腔体内;
[0055]
在线自适应曝光组件的具体结构如上文所述。
[0056]
步骤s3:利用光栅驱动电机9驱动光栅支架1向靠近待测样品6的方向移动,直至三个距离调节杆3全部接触到待测样品6,此时停止驱动光栅支架1(即光栅驱动电机9停止工作),进行待测样品6的在线曝光。
[0057]
其中,当力传感器8上的数值达到预定阈值时,判断为距离调节杆3 全部接触到样品衬底61。
[0058]
步骤s4:在曝光结束后,利用所述光栅驱动电机9驱动光栅支架1向远离待测样品6的方向移动,利用样品驱动电机驱动样品支架5变换位置,并回到步骤s3,直到待测样品6测量完成。
[0059]
其中,光栅驱动电机9是一个一维电机,其运动方向为靠近或远离待测样品6。样品驱动电机包括两个彼此垂直的一维电机,在平行于待测样品6 所在平面做二维运动,以改变待测样品6上的曝光位置,从而改变衬底上待测样品6的曝光区域,进行下一次曝光。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。