1.本发明涉及一种用于沉积食物产品的设备。更具体地,而非排他地,本发明涉及用于填充糖果产品的模腔的此类设备。
背景技术:
2.糖果产品通常通过将食物产品沉积到模具来产生。可使用此类方法沉积的食物产品包括巧克力(诸如包括宏或微气泡的充气巧克力)、焦糖、慕斯以及许多其他。
3.用于将食物产品沉积到模具中的一种现有技术使用活塞型沉积器。活塞型沉积器设置有室,供应食物产品到该室并且经受一系列活塞。当一系列活塞缩回时,将给定体积的食物产品抽取到每个相应的活塞室中并且将其储存,同时活塞室设置有出口孔。活塞移动通过活塞室以迫使食物产品通过出口孔。
4.用于将食物产品沉积到模具中的替代技术使用喷射沉积器。喷射沉积器包括室,该室在压力(通常为1bar-15bar)下接收食物产品,并且该室设置有通过其沉积食物产品的出口孔。设置密封孔并且可移动以释放食物产品的针阀。
5.模具一般将沿移动轨设置以允许许多模具快速连续地填充,并且沉积器经常以线性运动与模具同步移动以允许沉积时间延长。
6.本发明人已经识别用于沉积食物产品的改进设备,该改进设备提供了很多益处。本发明的设备允许对食物产品的沉积的更大控制,包括每个模具沉积的食物产品的量、每个模具中食物产品的分布的更大控制,以及最小化浪费的食物产品的量。
7.本发明的设备进一步提供节省空间的益处,这减少了工厂内的占地面积,从而提供节省成本的益处。该设备还允许相对于相当的喷射沉积器系统每分钟填充更大数量的模具。
技术实现要素:
8.本发明的各方面在所附权利要求中阐述。
9.根据本发明的第一方面,提供:一种用于沉积食物产品的设备,该设备包括:喷嘴,该喷嘴具有用于在正压下接收食物产品的室,该室设置有食物产品出口,该食物产品出口设置有第一密封表面;和阀针,该阀针包括第二密封表面,并且相对于出口在第一密封表面接近第二密封表面的关闭位置与相对于出口的多个离散的打开位置中的一个打开位置之间可移动。
10.该设备进一步包括致动器,该致动器被配置为设置阀针相对于出口的位置,该致动器可操作以将针的位置设定为关闭位置,以及多个打开位置中的任一个打开位置以用于沉积食物产品,并且其中该喷嘴进一步被配置为在使用中旋转以改变由设备沉积的食物产品的流动方向。
11.因此,提供了一种设备,该设备允许精细控制食物产品的沉积,包括沉积的食物产品的量、沉积的时序和沉积在模腔内的位置。
12.此外,由于喷嘴在使用中的旋转,本发明的第一方面的设备提供节省空间的益处,因为不需要喷嘴横向移动以便在移动的模腔内连续沉积食物产品。因此,允许此类线性运动必需的部件对设备不是必要的。
13.由喷嘴提供的精细沉积控制进一步促进喷嘴旋转机构的实现,因为当调整阀针的高度时,食物产品可使用旋转运动均匀地沉积在模腔上。也就是说,本发明的组合的阀针控制提供了对食物产品的沉积的期望水平的精确控制,以消除对同步线性运动的需要。
14.此外,高水平的沉积控制防止由于溢流而导致食物产品的浪费,因为流动速率可例如逐渐减小以提供精确的关闭时间。附加地,本发明允许食物产品准确地沉积在模腔上,这减少了沉积后所需的模具振动的水平,以实现食物产品在模腔内的平滑覆盖。
15.第一密封表面被限定为在关闭位置接近第二密封表面,然而,两者之间的精确距离可变化,例如取决于食物产品的粘度。例如,对于非粘性食物产品,第一密封表面可在关闭位置邻接第二密封表面,然而对于高粘度食物产品,第一密封表面和第二密封表面在关闭位置可能不一定邻接。然而,关闭位置对食物产品粘度的这种依赖性不是期望的,并且优选地针对喷嘴完全关闭,而无关质量粘度。
16.有利地,该设备可进一步包括模腔运输器,该模腔运输器在使用中被配置为用于相对于用于将食物产品沉积到一个或多个模腔中的旋转式喷嘴移动一个或多个模腔。例如,模腔运输器可以是传送带或链系统,或相对于沉积器能够移动模腔的任何其它装置。
17.因此,一个或多个模腔可在喷嘴下方移动。这样,喷嘴不必要与模腔同步横向移动以便将食物产品连续地沉积到模腔中。因此,相对于利用沉积器的线性运动的系统,设备中的机械应力和惯性可显著减小。
18.在一些方面,该设备可进一步包括控制器,该控制器被配置为:控制致动器来设置阀针的位置;以及在使用中控制喷嘴的旋转。此类系统允许精细控制食物产品的沉积,因为控制器可取决于喷嘴的(旋转)位置调整流动速率(通过调整阀针的位置),反之亦然。
19.此外,控制器可被配置为控制致动器在食物产品的沉积期间将阀针的位置设定为至少两个不同的打开位置。因此,食物产品的沉积速率可在沉积期间改变成单个模腔。这允许准确控制食物产品在模腔内的数量和分布。
20.在一些方面,该控制器可被配置为致使致动器在喷嘴的第一角位置处改变阀针的位置为一个打开位置以开始食物产品的沉积,并且该控制器可被配置为致使致动器在不同于第一角位置的第二角位置处改变阀针的位置为关闭位置。
21.此类布置允许食物产品沉积到给定模腔中,而不减小每分钟可填充的模具的数量。因此,可减小食物产品在沉积期间的流动速率,从而允许更精确控制沉积的食物产品的量。
22.此外,控制器可被配置为在阀针关闭之后致使喷嘴从第二角位置旋转到第一角位置。因此,单个喷嘴可将食物产品沉积到多个连续的模腔中,从而允许每分钟填充大量的模腔。
23.附加地,喷嘴在从第二角位置旋转到第一角位置期间的角速度在量值上可大于喷嘴在食物产品的沉积期间的角速度。
24.此类布置防止食物产品的
″
拖尾
″
,其中在喷嘴已经关闭之后,少量食物产品从喷嘴落下并且在模腔之间的空间着陆。这个方面允许
′
尾部
′
沉积在同一个模腔内部,从而减
少食物产品的浪费。例如,喷嘴可在从第二角位置旋转回到第一角位置期间以至多大约800mm/s移动。
25.在一些方面,控制器可被配置为致使致动器控制喷嘴内的阀针的位置,并且同时控制喷嘴的角位置以致使喷嘴在模腔的多个部分上沉积食物产品。
26.因此,该设备提供对模腔内沉积位置的精确控制,从而允许食物产品以高准确度沉积到模腔的不同区域(例如拐角)中。此外,在沉积期间可改变模腔内的沉积位置,以提供食物产品在模腔内的均匀分布。
27.有利地,喷嘴的旋转可与一个或多个模腔的移动在使用中同步。因此,可提高沉积到给定模腔中的准确度。例如,喷嘴的旋转通常可与模腔的移动同步,使得可做出对旋转的时序的小调整,以及对阀针的位置的调整,从而允许设备补偿模腔之间的小错位。
28.在一些方面,阀针可具有基本上为圆锥形的形状,并且出口可具有基本上为圆柱形的形状,并且其中在一个打开位置,阀针可限定阀针的外表面与基本上为圆柱形的出口的内表面之间的环形孔,并且其中阀针的位置可确定环形孔的尺寸。
29.因此,该设备提供孔尺寸的精细控制,其中在特定方向上移动喷嘴增加了孔尺寸以增加流动速率,并且在相反方向上移动喷嘴减小了孔尺寸以减小流动速率。
30.有利地,阀针的侧面可相对于基本上为圆柱形的出口的壁成角度,优选地其中阀针的侧面与基本上为圆柱形的出口的壁之间的角度介于1度与45度之间,更优选地其中阀针的侧面与基本上为圆柱形的出口的壁之间的角度介于10度与30度之间,并且进一步优选地其中阀针的侧面与基本上为圆柱形的出口的壁之间的角度为20度。因此,食物产品的流动速率可在沉积期间精确控制。以上角度为阀针的给定移动提供了流动速率的小变化,从而允许精确控制流动速率。
31.在一些方面,该设备可包括多个喷嘴,其中对于每个喷嘴,阀针的位置和旋转位置能够独立控制。因此,多个喷嘴可用于例如将食物产品沉积到单个模具中,从而允许均匀且精确地填充大模具。这允许用食物产品均匀地填充大模具,而不需要沉积后所需的大量模具振动以实现每个模腔内食物产品的平滑覆盖。
32.此外,每个喷嘴的独立控制允许考虑到模具(或不同目标产品)中的错位,并且因此一致地填充模具。此外,这允许补偿沿沉积室的任何压力/流动变化,以便优化最终产品的过程/重量控制。
33.在此类方面,多个喷嘴可布置成多个喷嘴组,其中每个喷嘴组可包括一个或多个喷嘴,并且每个喷嘴组可被配置为将食物产品沉积到一个单独的模腔中。因此,该设备可同时将食物产品沉积到多个模具中,从而大幅增加每分钟可填充的模具数量。
34.有利地,该设备可进一步包括多行喷嘴,其中致动器可被配置为致使每行喷嘴交替地将食物产品沉积到不同的模腔中。这可采取多个沉积器串联布置的形式,或者单个沉积器可包括串联的多行喷嘴。
35.也就是说,模腔可连续移动通过设备,并且每个喷嘴仅将食物产品沉积到每隔一个模腔中。换句话说,第一喷嘴将食物产品沉积到给定模腔中,但是不将食物产品沉积到在喷嘴下方穿过的下一个模腔中。然后,第一喷嘴将食物产品沉积到在喷嘴下方穿过的以下模腔中。在这个示例中,不同行的喷嘴中的第二喷嘴将食物产品沉积到第一喷嘴未沉积食物产品的模腔中。
36.可设置任何行数的喷嘴。例如,可设置三行喷嘴,其中每个喷嘴被配置为将食物产品沉积到在喷嘴下方穿过的每第三个模腔中。
37.此类布置允许模腔更近地放置在一起,而不降低每个喷嘴沉积食物产品的速度,从而增加每分钟可填充的模腔数量而不显著增加设备的尺寸。
38.在一些方面,食物产品可以是充气巧克力。因此,该设备允许充气巧克力均匀地沉积在模腔上,从而减少充气巧克力需要振动的量。在微充气巧克力的情况下,振动减少特别有益,因为这减少了气泡聚结和膨胀。
附图说明
39.现在将参考以下附图仅以举例的方式描述本发明的实施方案。
40.根据本发明的一个(或多个)实施方案,附图示出了以下内容:
41.图1示出了用于将食物产品沉积到模腔中的传统设备。
42.图2a示出了在第一使用阶段的沉积设备。
43.图2b示出了在第二使用阶段的沉积设备。
44.图2c示出了在第三使用阶段的沉积设备。
45.图2d示出了在第四使用阶段的沉积设备。
46.图3a和图3b示出了处于关闭状态的喷嘴的不同视图。
47.图4a和图4b示出了处于第一打开状态的喷嘴的不同视图。
48.图5a和图5b示出了处于第二打开状态的喷嘴的不同视图。
49.图6示出了环形孔的横截面面积对比阀针的高度的图表。
50.图7示出了针对阀针的侧面与喷嘴的出口的壁之间的多个角度,在给定时间段内由喷嘴沉积的食物产品的平均重量对比特定的阀针高度的图表。
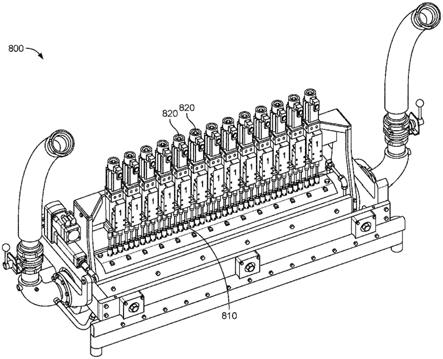
51.图8示出了包括多个喷嘴的沉积设备。
52.不能将本说明书中对现有技术文献中的任何参照视为承认此类现有技术为众所周知的技术或形成本领域普遍常识的一部分。
53.如本说明书中所用,词语
″
包括
″
、
″
包含
″
和类似词语不应理解为具有排他性或穷举性的含义。换句话讲,这些词语旨在意指
″
包括,但不限于
″
。
54.参考以下实施例进一步描述本发明。应当理解,受权利要求书保护的本发明并非旨在以任何方式由这些实施例限制。将进一步认识到,具备相关技能的读者根据本文的教导将理解,不同实施方案的整体和特征可以以任何合适和有利的组合来使用。
具体实施方式
55.图1示出了用于将食物产品105沉积到模腔110中的传统设备。该设备包括用于沉积食物产品105的喷嘴130。喷嘴130包括用于容纳食物产品105的室135和孔140,该孔可打开和关闭,设置在从其沉积食物产品105的喷嘴130的一端部。
56.喷嘴130还包括安装区段145,该安装区段将喷嘴130安装到轨道150。设备100包括用于运输模腔的轨120。在使用中,轨120沿线性路径移动模腔110,并且喷嘴130在线性路径上沿轨道150移动。
57.当喷嘴130与第一模腔110(1)同步沿轨道150移动时,喷嘴130通过喷射食物产品
105通过孔140将食物产品105沉积到第一模腔110(1)中。在喷嘴130已经完成将食物产品105沉积到第一模腔110(1)中之后,喷嘴150沿轨道150移动以将孔140定位在第二模腔110(2)上方,该第二模腔沿轨120移动。
58.当喷嘴130与第二模腔110(2)同步沿轨道150移动时,喷嘴130通过喷射食物产品105通过孔140将食物产品105沉积到第二模腔110(2)中。在喷嘴130已经完成将食物产品105沉积到第二模腔110(2)中之后,相对于第三模腔110(3)执行类似的过程。
59.一旦食物产品105已经沉积到模腔110中,模腔110通常将振动以致使食物产品105均匀地填充模腔110以确保所得产品为期望的形状。
60.可通过增加提供食物产品105的压力、打开孔140更长或更短的持续时间或通过相对于模腔110增加或减小喷嘴130的行进速度,控制食物产品到模腔110中的沉积。
61.然而,由于线性移动喷嘴130所需的部件(诸如轨道150)需要空间,因此此类系统可能需要很大量的工厂空间来实现,并且不提供管理食物产品的压力/流动的波动的能力,这可能导致总产品重量不一致。
62.图2a至图2d示出了用于将食物产品205沉积到模腔210(1)中的示例设备200。提供了一种模具运输器220,该模具运输器相对于喷嘴230移动模腔210(1)。模具运输器220可形成设备200的一部分,或者可被认为与设备200分离。模腔运输器220可例如是传送带或链系统,然而可使用可在喷嘴230下方运输模腔210(1)的任何系统。
63.设备200包括喷嘴230,该喷嘴包括用于沉积食物产品205的孔240。孔240可打开和关闭以控制食物产品的沉积。设备200还可包括致动器(未示出)以控制孔240的打开和关闭。孔240可打开到多个不同的打开位置,以控制食物产品205从喷嘴流动的速率,如稍后将关于图3a至图5b描述。设备200可进一步包括控制器260,该控制器可控制喷嘴230通过致动器的开口。
64.图2a示出了在第一使用阶段的设备200和处于关闭状态的喷嘴230的孔240。如图所示,喷嘴230相对于模腔210(1)成角度。尽管未示出,但是在这个位置,控制器被配置为打开喷嘴230的孔240以开始食物产品205的沉积。
65.处于第一状态的喷嘴230的角度致使食物产品205非垂直沉积。因此,食物产品可被引导至模腔210(1)的非中心区域(或部分)。尽管喷嘴230被示出为朝向模腔210(1)的前导部分引导食物产品(在图2a中模腔从左向右移动的情况下),喷嘴交替地朝向模腔210(1)的拖尾部分引导食物产品205。
66.随着模具运输器220在喷嘴230下方移动模腔210(1),喷嘴230旋转以相对于模腔210(1)改变沉积角度。因此,喷嘴230能够在模腔210(1)的整个特定运动范围内将食物产品205沉积到模腔210(1)中。
67.喷嘴230可大体上与模腔210的移动同步地旋转。可做出对喷嘴230的旋转时序的小调整,以及对孔240的打开位置的调整,从而允许设备200补偿模腔210之间的小错位。
68.图2b示出了在图2a所示的第一使用阶段之后的第二使用阶段的设备200。在这个第二使用阶段中,在模腔210(1)已经由模具运输器220移动并且喷嘴230已经旋转之后,喷嘴230与模腔210(1)基本上成垂直的角度。因此,食物产品205大致垂直沉积,这允许食物产品205被引导至模腔210(1)的基本上中心的区域。
69.在第一阶段(图2a中示出)与第二阶段(图2b中示出)之间,喷嘴230可通过将孔240
维持在打开状态来连续地沉积食物产品205。交替地,孔240可在第一状态与第二状态之间可能多次关闭并且重新打开,使得食物产品205不连续沉积。而且,食物产品205的沉积速率可通过调整孔240的打开位置在第一状态与第二状态(可能多次)之间改变。
70.此外,喷嘴230的横向位置可在第一状态与第二状态之间保持基本上不变。换句话说,喷嘴230不在第一状态与第二状态之间平移。
71.图2c示出了在图2b所示的第二使用阶段之后的第三使用阶段的设备200。在这个第三阶段中,模腔210(1)已经由模腔运输器220在喷嘴230下方进一步移动。因此,喷嘴230已经进一步旋转以改变喷嘴230相对于模腔210(1)的角度,以允许食物产品205在第二阶段与第三阶段之间沉积到模腔210(1)中。
72.处于第三状态的喷嘴230的角度致使食物产品205非垂直沉积。因此,食物产品205可被引导至不同于处于第一状态的食物产品205被引导至的模腔210(1)的非中心区域的模腔210(1)的非中心区域。尽管喷嘴230被示出为朝向模腔210(1)的拖尾部分引导食物产品205(在图2c中模腔从左向右移动的情况下),但是喷嘴230交替地朝向模腔的前导部分引导食物产品205。交替地,模腔可固定在沉积器下面。
73.类似于如关于图2b所述,在第二阶段(图2b中示出)与第三阶段(图2c中示出)之间,喷嘴230可通过将孔240维持在打开状态来连续沉积食物产品205。交替地,孔240在第二状态与第三状态之间可能多次关闭并且重新打开,使得食物产品205不连续沉积。而且,食物产品205的沉积速率可通过调整孔240的打开位置在第二状态与第三状态之间改变。
74.此外,喷嘴230的横向位置可在第二状态与第三状态之间保持基本上不变。换句话说,喷嘴230不在第二状态与第三状态之间平移。
75.一旦期望量的食物产品205已经沉积到模腔210中,并且实现了食物产品205在模腔210(1)上的期望覆盖,孔240就移动到关闭状态以结束食物产品205到模腔210(1)中的沉积。
76.通过允许食物产品205均匀地沉积在整个模腔210(1),减少了实现食物产品205的平滑覆盖所需的振动量。这在食物产品205是充气巧克力的示例中特别有利,因为过度振动可能致使气泡聚结和膨胀减少,这可能是不期望的(特别是在微充气巧克力中)。在宏充气巧克力的情况下,平滑和精确的分布也是有利的,因为随后施加到食物产品的任何次级层保持平坦且均匀分布。总体上,这增强了最终的重量控制和生产效率。
77.在孔240移动到关闭状态之后,喷嘴230可能需要在短时间内开始将食物产品205沉积到由模具运输器220移动的第二模腔210(2)中,以确保在模具运输器220将第二模腔210(2)移动到喷嘴230的范围外之前,期望量的食物产品205可以以期望覆盖沉积到第二模腔210(2)中。
78.因此,喷嘴230执行返回运动,以将喷嘴230从图2c所示的角位置快速移动到图2d所示的角位置,该角位置是图2a所示的相同角位置。因此,如图2d所示,在完成将食物产品205沉积到第一模腔210(1)之后不久,喷嘴230可开始将食物产品205沉积到第二模腔210(2)的前导部分中。
79.例如,提供孔240的喷嘴的端部可在返回运动期间以大约介于1mm/s至800mm/s移动。快速返回运动防止食物产品205在模腔210(1)与210(2)之间
″
拖尾
″
。也就是说,返回运动致使在孔240已经关闭之后保留在孔240周围的任何残留食物产品205在沉积到第二模腔
210(2)中开始之前沉积到第一模腔210(1)中。因此,可减少食物产品205的浪费,以及增强清洁度,这还增加了随时间的生产效率。返回运动可在与图2a至图2c所示的旋转运动相反的旋转方向上执行,或者返回运动可在相同的旋转方向上执行。
80.在喷嘴230的整个旋转运动中,喷嘴可保持在基本上相同的横向位置。也就是说,喷嘴230可绕特定轴线旋转而不平移。因此,可减少喷嘴230的线性移动,从而降低设备中的机械应力,从而减少部件故障和磨损。然而,除了旋转运动之外,喷嘴230可横向移动。
81.图3a示出了喷嘴230的横截面视图,其中喷嘴230被配置为如图所示以向下方向沉积食物产品。喷嘴230包括由室壁320限定的室305。室305还包括从其沉积食物产品的出口330。出口330设置有第一密封表面315。在一些示例中,第一密封表面可以是出口330与室305的壁之间的边缘。
82.喷嘴230进一步包括阀针310。阀针310可相对于出口330(和室壁320)在垂直方向上移动,并且设置有第二密封表面315。在一些示例中,第二密封表面可以是边缘。阀针310可由致动器(未示出)移动。
83.在图3a中,第一密封表面315和第二密封表面325彼此接近(密封表面315和325被示出为彼此邻接,然而,这不一定是必需的,取决于食物产品的粘度)。因此,喷嘴230处于关闭状态,其中食物产品不能从室305流动到出口330。室305可在大于1.0bar、大于1.1bar、大于1.25bar、大于1.5bar或大于2.0bar(例如,1.0bar-20.0bar、1.0bar-15.0bar、1.5bar-12.5bar、2.0bar-10.0bar或3.0bar-7.0bar)的正压(例如,超过大气压的压力)下接收食物产品,使得第一密封表面315和第二密封表面325的接近防止食物产品流动到出口330。
84.如图所示,出口330可具有基本上为圆柱形的形状,并且阀针310可具有基本上为圆锥形的形状。因此,阀针310的侧面可相对于出口330的内表面335成角度。交替地,出口330和阀针310可具有允许喷嘴230放置在关闭状态的其它互补形状。例如,阀针可具有近似四边形金字塔的形状,并且出口可具有大致方形棱柱的形状。
85.图3b示出了图3a所示的喷嘴230的替代视图,在第二密封表面325处从喷嘴230的下侧示出。如图所示,没有食物产品可在阀针310与室壁320之间流动通过的间隙。因此,喷嘴230处于关闭状态。
86.图4a从与图3a相同的视点示出了处于第一打开状态的喷嘴230。如图所示,阀针310已经相对于孔330和室壁320垂直向上移动。因此,阀针310的第一密封表面315不接近出口330的第二密封表面325。因此,创建由虚线示出的孔340,通过该孔食物产品可从室305流动到出口330。
87.如图4b所示,示出了与图3b的喷嘴230相同的视点,孔340具有环形形状。食物产品能够流动通过这个孔340,使得可沉积食物产品。
88.图5a从与图3a和图4a相同的视点示出了处于第二打开状态的喷嘴230。如图所示,与图4a中所示的第一打开状态相比,阀针310已经进一步垂直向上移动。因此,与第一打开状态相比,由虚线示出的孔340的横截面面积(或尺寸)已经增加。
89.如图5b所示,示出了与图3b和图4b所示的喷嘴230相同的视点,与图4b所示的第一打开状态相比,环形孔340在尺寸上已经增加。因此,食物产品可在第二打开状态以比在第一打开状态更快的速率从室305流动到出口330。
90.当沉积食物产品时,阀针310的位置可设定为多个不同打开状态中的任一个打开
状态(例如,分别在图4和图5中示出的第一打开状态和第二打开状态)。也就是说,阀针310不限于仅移动通过特定的打开位置以到达单个打开状态。相反,阀针310可根据需要维持在任何给定打开状态下,并且在沉积期间根据需要进行调整。
91.例如,在沉积过程期间,阀针310可在关闭状态下开始。然后,阀针310可第一次移动到第二打开状态,然后第二次移动到第一打开状态。然后,阀针可第三次移动回到第二打开状态,然后移动到关闭状态。
92.阀针310可由致动器以高度增量调整,从而允许精确控制孔340的横截面面积,并且因此精确控制食物产品的流动速率。例如,阀针310可以以0.01mm的增量设定为特定高度,然而,可替代使用其它增量,诸如介于0.005mm与0.1mm之间。因此,孔的横截面面积可非常精确地调整。
93.图6示出了对于圆锥形阀针和圆柱形出口孔的横截面面积对阀针高度的示例图表。所示曲线具有浅斜率的规则形状。因此,可通过对阀针高度做出类似的小调整,对横截面面积做出小调整。因此,可精细控制食物产品的流动速率。
94.此外,对于阀针高度的给定变化,孔的横截面面积的变化,以及因此食物产品的流动速率,取决于阀针的侧面与出口的壁之间的角度。图7示出了针对阀针的侧面与出口的壁之间的三个不同角度,在设定时间段内由喷嘴沉积的食物产品的平均重量对比阀针高度的示例图表。
95.该图表包括总角度(即,针的两侧的角度之和)为10度、20度和30度的曲线,即在阀针的每一侧,阀针的侧面和出口的壁之间的角度为5度、10度和15度。然而,可使用其它各个角度,诸如介于1度与45度之间(即,介于2度与90度之间的总角度)。在这个实施方案中,针优选地基本上是对称的,即,介于2度与90度之间的总角度与介于1度与45度之间两个相同值的角度之和有关。虽然可利用阀针的侧面与出口的壁之间的10度或30度的总角度,但是20度的总角度在图7的图表上产生比这些角度更浅的曲线。因此,阀针的侧面与出口的壁之间的20度的总角度,允许对于阀针高度的给定变化对食物产品的流动速率更小的调整,从而提供沉积的食物产品的量的更精确控制。
96.图8示出了用于沉积食物产品的示例设备800。设备800包括以行布置的多个喷嘴810,使得模腔可同时在喷嘴下方平行移动。因此,每分钟可填充的模腔的数量大幅增加,而不大幅增加设备的整体尺寸。
97.此外,喷嘴810可布置成组820,其中每个组820将食物产品沉积到不同的模腔中。因此,可均匀地填充大模具,从而降低在模腔中获得均匀覆盖所需的振动水平。此外,可减小每个喷嘴所需的沉积速率,而整个食物产品沉积速率没有任何损失,从而允许食物产品在模具内的量和覆盖的更精细控制。在图8所示的示例设备800中,设备800包括13个组820以用于一次沉积到多达13个模腔中。
98.每个组820包括3个喷嘴,其中组820中的每个喷嘴810将食物产品沉积到同一个模腔中。组820中每个喷嘴810的室与组820中的其它喷嘴810流体连通。然而,组820(和不同组)中的喷嘴810可独立控制。也就是说,对于每个喷嘴810,可单独调整喷嘴810的打开和关闭和喷嘴810的旋转两者。因此,可单独考虑模腔之间的错位,从而允许一致填充每个模腔。类似地,喷嘴810的控制的独立性允许补偿沿沉积室的任何压力/流动变化,以便优化最终产品的过程/重量控制。
99.在模具相对于设备800错位的情况下(即,不垂直于行进方向),使得模具的特定部分在模具的其它部分之前到达喷嘴810,基于错位的程度,每个喷嘴810可在不同的时间和旋转位置开始沉积,可以以不同的速率沉积食物产品,并且可沉积不同总量的食物产品。
100.例如,当模腔以错位(或偏斜)的取向穿过设备800下方时,配置成将食物产品沉积到错位模腔中的喷嘴组820的第一喷嘴可以以第一速率在第一旋转位置在第一时间开始食物产品的沉积,并且可沉积第一量的食物产品。然后,喷嘴组820的第二喷嘴可以以第二速率在第二旋转位置处在第二时间开始将食物产品沉积到错位的模腔中,并且可沉积第二量的食物产品。第二时间、第二旋转位置、第二速率和第二量中的一个或多个可分别与第一时间、第一旋转位置、第一速率和第一量不同。喷嘴组820中的每个另外的喷嘴可分别在不同的时间、不同的旋转位置、不同的速率开始沉积食物产品和/或沉积不同的量。
101.因此,即使当模具基本上错位时,这可通过与喷嘴的旋转组合的对喷嘴的开口的独立和精确的控制来补偿,使得模具可均匀地填充,而不管模具取向。
102.交替地,可共同控制喷嘴组,其中每个喷嘴组独立于其它喷嘴组控制,以补偿在穿过设备的不同模具之间放置的变化。
103.设备800可设置有多行喷嘴810。这可采取多个沉积器串联布置的形式,或者单个沉积器可包括串联的多行喷嘴。例如,可在设备800中设置多个平行行的喷嘴。在此类示例中,行中的每个喷嘴仅将食物产品沉积到每第n个模腔中,其中n是行的数量。
104.例如,如果设置两行,第一行中的第一喷嘴将食物产品沉积到给定模腔中,但是不将食物产品沉积到在喷嘴下方穿过的下一个模腔中。然后,第一喷嘴将食物产品沉积到在喷嘴下方穿过的以下模腔中。在这个示例中,第二行喷嘴中的第二喷嘴将食物产品沉积到第一喷嘴未沉积食物产品的模腔中,并且不将食物产品沉积到第一喷嘴沉积食物产品的模腔中。
105.可设置任何行数的喷嘴。例如,可设置三行喷嘴,其中每个喷嘴被配置为将食物产品沉积到在喷嘴下方穿过的每第三个模腔中。
106.此类布置允许模腔更近地放置在一起,而不降低每个喷嘴沉积食物产品的速度,从而增加每分钟可填充的模腔数量而不显著增加设备的尺寸。
107.此外,虽然已经关于食物产品沉积到模腔中描述了沉积设备,但是不需要将食物产品沉积到模腔中。相反,食物产品可沉积到可以是目标表面或产品的任何目标上。
108.例如,上述技术和设备可用于糖果产品(例如呈条形形状,尽管可使用其它形状)在食物产品的层中包覆填充(或其它组成部分)。如果需要,可施加多层食物产品到糖果产品,这可由串联的不同沉积器或由同一沉积器完成。
109.上述技术还可用于将食物产品的液滴沉积到传送带(或其它表面上)以产生精确加权的纽扣形糖果产品或基本上任何其它成形的糖果产品。因此,上述技术不仅适用于模具的填充。
110.因此,已经描述了一种用于沉积食物产品的设备,该设备包括具有食物产品出口的喷嘴;阀针,该阀针在关闭位置与多个离散的打开位置中的一个打开位置之间可相对移动;和致动器,该致动器被配置为设置阀针相对于出口的位置,其中喷嘴进一步能够在使用中旋转以改变由设备沉积的食物产品的流动方向。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。