1.本实用新型涉及焊接技术领域,具体为一种可精准定位的环焊接机器人。
背景技术:
2.焊接,也称作熔接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术,现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等。除了在工厂中使用外,焊接还可以在多种环境下进行,如野外、水下和太空。无论在何处,焊接都可能给操作者带来危险,所以在进行焊接时必须采取适当的防护措施。
3.传统的生产工艺大多比较落后,大多产品传统的工艺为人工装夹定位及焊接,人工操作费时费力,而且可能会因为疏忽而导致焊接故障,因此,传统的焊接方式效率低下且焊接质量得不到保证,效率十分低下;同时,后桥壳的形状呈柱形,而后盖呈圆形,形状较为复杂,使得在对工件进行焊接时定位夹持效果较差,焊接过程中需要保持固定并定位精准,否则容易影响对工件的焊接质量。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种可精准定位的环焊接机器人,克服了现有技术的不足,结构设计简单,有效的解决了传统的生产工艺大多比较落后,大多产品传统的工艺为人工装夹定位及焊接,人工操作费时费力,而且可能会因为疏忽而导致焊接故障,因此,传统的焊接方式效率低下且焊接质量得不到保证,效率十分低下;同时,后桥壳的形状呈柱形,而后盖呈圆形,形状较为复杂,使得在对工件进行焊接时定位夹持效果较差,焊接过程中需要保持固定并定位精准,否则容易影响对工件的焊接质量的问题。
5.为了解决上述技术问题,本实用新型提供了如下的技术方案:
6.一种可精准定位的环焊接机器人,包括装置主体,所述装置主体的背部安装有底座,所述底座的顶部安装有机械臂,所述机械臂的一端设置有限位环,所述机械臂的背部设置有焊枪;
7.所述焊枪设置在限位环的内部。
8.优选的,所述装置主体的内部设置有翻转机构,所述翻转机构的顶部安装有电机,所述电机的输出端通过驱动轴安装有工作台,所述工作台的顶部分别开设有安装槽和限位槽。
9.优选的,所述安装槽的内部设置有安装框架,所述安装框架的顶部中间位置处开设有通孔,所述通孔的内部设置有定位夹具,所述定位夹具设置有三个,且所述定位夹具均呈环形设置。
10.优选的,所述安装框架的外表面设置有支臂,所述安装框架位于焊枪的正下方,且所述定位夹具在通孔内活动。
11.优选的,所述安装框架的顶部开设有凹槽,所述凹槽的内部安装有接近开关,所述
接近开关的高度低于凹槽的高度。
12.优选的,所述装置主体的外表面设置有防护门,所述装置主体的一侧安装有警报器,所述警报器与接近开关电性连接,所述装置主体的另一侧设置有操作台,所述操作台分别与翻转机构、电机、机械臂、焊枪和接近开关电性连接。
13.本实用新型实施例提供了一种可精准定位的环焊接机器人,具备以下有益效果:焊接机器人一般由多个关节组成操作手臂或其它形式运动机构,机构末端夹持焊枪等焊接辅助装置,在焊接操作空间内完成工件焊接所要求的焊缝轨迹运动,通过机械臂自动对工件进行焊接,减轻了工作人员的劳动强度并且提高了焊接效率,并且通过安装框架顶部的接近开关对工件进行监测,若工件放置不到位使得接近开关将信号反馈给操作台,操作台启动警报器,警报器发出警报从而警示工作人员,方便工作人员对工件的位置进行调整,以对工件达到精准定位,避免影响工件的焊接质量。
14.1、通过设置机械臂、翻转机构、电机和驱动轴,在对工件进行焊接时,工作人员可将工件放置于安装框架上,随后便通过定位夹具对工件进行夹紧固定,再通过操作台启动机械臂,使得机械臂带动焊枪移动,从而通过焊枪对工件进行焊接,并且可通过启动电机,电机带动驱动轴转动,驱动轴带动工作台和安装框架转动,从而对工件的焊接位置进行调整,通过机械臂自动对工件进行焊接,减轻了工作人员的劳动强度并且提高了焊接效率。
15.2、通过设置警报器、定位夹具、凹槽和接近开关,工作人员先将工件放置于安装框架上,随后便通过定位夹具对工件进行夹紧固定,提高夹持效果,降低了工作人员的夹持难度,此时通过安装框架顶部的接近开关对工件进行监测,若工件放置不到位使得接近开关将信号反馈给操作台,操作台启动警报器,警报器发出警报从而警示工作人员,方便工作人员对工件的位置进行调整,以对工件达到精准定位,避免影响工件的焊接质量。
附图说明
16.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
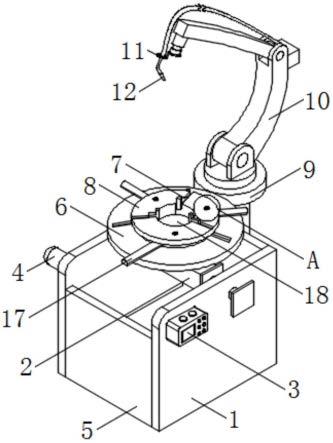
17.图1是本实用新型整体结构示意图;
18.图2是本实用新型工作台结构示意图;
19.图3是本实用新型图1中a处的放大结构示意图。
20.图中:1、装置主体;2、翻转机构;3、操作台;4、警报器;5、防护门;6、工作台;7、定位夹具;8、安装框架;9、底座;10、机械臂;11、限位环;12、焊枪;13、电机;14、驱动轴;15、安装槽;16、限位槽;17、支臂;18、通孔;19、凹槽;20、接近开关。
具体实施方式
21.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
22.实施例:如图1-3所示,一种可精准定位的环焊接机器人,包括装置主体1,装置主体1的背部安装有底座9,底座9的顶部安装有机械臂10,焊接机器人一般由多个关节组成操作手臂或其它形式运动机构,机构末端夹持焊枪等焊接辅助装置,在焊接操作空间内完成工件焊接所要求的焊缝轨迹运动,机械臂10的一端设置有限位环11,机械臂10的背部设置
有焊枪12,使得机械臂10能够带动焊枪12移动,焊枪12设置在限位环11的内部,通过限位环11对焊枪12进行限位,以避免焊枪12松脱或者偏移抖动而影响焊接质量。
23.具体的,请参阅图1-2,装置主体1的内部设置有翻转机构2,通过翻转机构2能够对工件的角度进行调整,并且翻转机构2的顶部安装有电机13,电机13的输出端通过驱动轴14安装有工作台6,电机13启动后带动驱动轴14转动,驱动轴14转动后从而对工作台6的角度进行调整。
24.具体的,请参阅图1,安装槽15的内部设置有安装框架8,此时通过限位槽16对安装框架8进行限位,安装框架8的顶部中间位置处开设有通孔18,通孔18的内部设置有定位夹具7,定位夹具7设置有三个,且定位夹具7均呈环形设置,以便于通过定位夹具7对工件进行夹紧固定。
25.具体的,请参阅图1,安装框架8的外表面设置有支臂17,且定位夹具7在通孔18内活动,使得定位夹具7在通孔18内活动过程中能够对不同规格的工件进行夹紧固定,安装框架8位于焊枪12的正下方,方便焊枪12对工件进行焊接。
26.具体的,请参阅图1和图3,安装框架8的顶部开设有凹槽19,凹槽19的内部安装有接近开关20,接近开关20的高度低于凹槽19的高度,使得工件放置于安装框架8上并通过定位夹具7对工件进行夹持过程中能够通过接近开关20对工件进行监测,以避免工件发生偏移,能够对工件进行精准定位。
27.具体的,请参阅图1,装置主体1的一侧安装有警报器4,警报器4与接近开关20电性连接,若工件放置不到位使得接近开关20将信号反馈给操作台3,操作台3启动警报器4,警报器4发出警报从而警示工作人员,方便工作人员对工件的位置进行调整,以对工件达到精准定位,操作台3分别与翻转机构2、电机13、机械臂10、焊枪12和接近开关20电性连接,以便于工作人员通过操作台3对翻转机构2、电机13、机械臂10、焊枪12和接近开关20进行操作。
28.工作原理:首先,焊接机器人一般由多个关节组成操作手臂或其它形式运动机构,机构末端夹持焊枪等焊接辅助装置,在焊接操作空间内完成工件焊接所要求的焊缝轨迹运动,工作人员先将工件放置于安装框架8上,随后便通过定位夹具7对工件进行夹紧固定,提高夹持效果,降低了工作人员的夹持难度,此时通过安装框架8顶部的接近开关20对工件进行监测,若工件放置不到位使得接近开关20将信号反馈给操作台3,操作台3启动警报器4,警报器4发出警报从而警示工作人员,方便工作人员对工件的位置进行调整,以对工件达到精准定位,避免影响工件的焊接质量,随后再通过操作台3启动机械臂10,使得机械臂10带动焊枪12移动,从而通过焊枪12对工件进行焊接,并且可通过启动电机13,电机13带动驱动轴14转动,驱动轴14带动工作台6和安装框架8转动,从而对工件的焊接位置进行调整,通过机械臂10自动对工件进行焊接,减轻了工作人员的劳动强度并且提高了焊接效率。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。