1.本发明主要涉及机械产品加工用机械抓手的技术领域,具体为一种机械零件加工用可精确定位的四轴机器人抓手。
背景技术:
2.汽车配件加工是构成汽车配件加工整体的各单元及服务于汽车配件加工的产品,随着汽车配件加工市场竞争的日趋激烈,环保理念的深入人心,以及技术的不断升级和应用,国际汽车配件加工零部件行业近年来生产要求越来越高。
3.当汽车配件产品在模具中注塑成型之后,需要通过机器人抓手将其移动到裁切模具中进行裁切,然后送到下一工序中的输送承座上。目前,传统上四轴机器人抓手不能精准定位,容易造成在模具中蹩住,还常常出现抓空现象,导致需要重新进行定位和抓取,影响工作效率。
技术实现要素:
4.本发明主要提供了一种机械零件加工用可精确定位的四轴机器人抓手,用以解决上述背景技术中提出的技术问题。
5.本发明解决上述技术问题采用的技术方案为:一种机械零件加工用可精确定位的四轴机器人抓手,包括顶板,所述顶板上方设有驱动机构,所述顶板上端安装有连接座,所述连接座一侧设有嵌设在顶板上的裁切模侧上下气缸,所述裁切模侧上下气缸下端连接有裁切模安装板,所述裁切模安装板下端安装有裁切模移动板,所述裁切模安装板一侧连接有模具侧移动板,所述模具侧移动板上端设有和顶板连接的模具侧安装板,所述模具侧移动板下端设有四组模具侧夹取气缸,所述裁切模移动板下端安装有四组裁切模侧夹取气缸,所述模具侧夹取气缸和裁切模侧夹取气缸上皆安装有固定抓手,所述固定抓手内部抓取有产品;所述模具侧安装板下端两侧安装有模具侧限位杆,所述模具侧移动板和裁切模移动板下端皆安装有两个定位柱,每个所述定位柱内部下端皆滑动有压板,所述压板下端连接有贯穿定位柱的顶杆,所述压板上端设有和定位柱内壁连接的限位板,所述限位板内部滑动连接有传动杆,所述传动杆下端和压板连接,所述传动杆上套设有弹簧,所述弹簧两端分别和压板、限位板连接,所述传动杆上端连接有升降板,所述升降板侧壁上设有环凹槽,所述定位柱内壁上设有导向环凹槽,所述导向环凹槽和环凹槽之间设有滑动球,所述滑动球滑动在导向环凹槽和环凹槽内部,所述导向环凹槽上端设有和定位柱内壁连接的固定挡板,所述固定挡板上滑动有两个曲杆,两个所述曲杆下端皆和升降板连接,且两个所述曲杆上端皆连接有和定位柱内壁滑动连接的阻气板,所述定位柱顶端设有进气道、回气道和排气道。
6.优选的,所述驱动机构包括电动导轨,所述电动导轨上滑动有电动滑块,所述电动滑块和连接座连接。
7.优选的,所述模具侧安装板一侧安装有电磁阀组,所述裁切模侧上下气缸输出端
和输出端、模具侧夹取气缸输出端、裁切模侧夹取气缸输出端皆和电磁阀组通过软管连接,所述排气道和相邻的两个模具侧夹取气缸或裁切模侧夹取气缸输入端连接。
8.优选的,所述裁切模安装板和模具侧安装板侧壁上皆安装有若干个球头柱塞。
9.优选的,所述模具侧移动板上端安装有四组模具侧旋转气缸,每个所述模具侧旋转气缸输出端皆和对应的模具侧夹取气缸连接,所述定位柱最低端和模具侧旋转气缸、裁切模侧夹取气缸最下端位于同一水平面上。
10.优选的,所述模具侧夹取气缸和裁切模侧夹取气缸下端分别设有成型模具和裁切模具,所述裁切模具远离成型模具一侧设有输送承座。
11.优选的,所述导向环凹槽上设有若干个最高处、中点和最低点,且若干个所述最高处、中点和最低点交错分布,当所述滑动球位于最高处和中点之间时,所述回气道被阻气板阻挡。
12.与现有技术相比,本发明的有益效果为:本发明在进行使用时,模具侧限位杆位于模具两侧,确保夹持位置不会出现偏差,模具侧夹取气缸和裁切模侧夹取气缸下移对产品进行夹持,在模具侧安装板下移的时候,进气道进气,进入的气体通过回气道回流,定位柱跟随下移,直到顶杆和模具接触,此时,固定抓手位于产品两侧,顶杆在压力的作用下上移,使得弹簧收缩,传动杆推动升降板上移,滑动球在升降板的带动下上移,从导向环凹槽的最低点向上移动,曲杆随着升降板的上移而上移,阻气板也上移,直到滑动球移动到最高处,阻气板将回气道挡住,同时排气道不再被遮挡,通过进气道进入的气体,会通过排气道将气体输送进模具侧夹取气缸或裁切模侧夹取气缸,使得模具侧夹取气缸和裁切模侧夹取气缸驱动固定抓手对产品进行夹持,采用了自动运行、自动夹取产品,增加了模具侧限位以及模具侧和裁切模侧的球头柱塞,避免夹持位置出现偏差,同时在定位柱和模具接触时,固定抓手进行抓取,从而解决了夹取不到产品的风险,避免了四轴机器人抓手不能精准定位的问题,提高了工作效率。
13.以下将结合附图与具体的实施例对本发明进行详细的解释说明。
附图说明
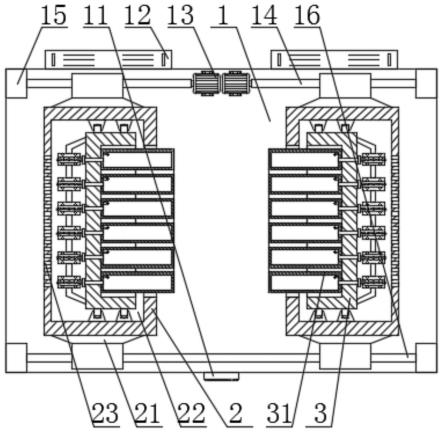
14.图1为本发明的立体示意图;图2为本发明的侧视示意图;图3为本发明的夹取气缸立体示意图;图4为本发明的定位柱结构示意图;图5为本发明的导向环凹槽展开结构示意图。
15.附图说明:1、顶板;11、连接座;12、裁切模侧上下气缸;13、球头柱塞;14、固定抓手;2、驱动机构;21、电动导轨;22、电动滑块;3、裁切模安装板;31、裁切模移动板;32、裁切模侧夹取气缸;4、模具侧安装板;41、模具侧移动板;42、模具侧夹取气缸;43、模具侧旋转气缸;44、模具侧限位杆;5、电磁阀组;6、产品;7、定位柱;701、压板;702、顶杆;703、限位板;704、传动杆;705、弹簧;706、升降板;707、环凹槽;708、导向环凹槽;709、滑动球;710、固定挡板;711、曲杆;712、阻气板;713、进气道;714、回气道;715、排气道;716、最高处;717、中点;718、最低点。
具体实施方式
16.为了便于理解本发明,下面将参照相关附图对本发明进行更加全面的描述,附图中给出了本发明的若干实施例,但是本发明可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本发明公开的内容更加透彻全面。
17.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
18.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常连接的含义相同,本文中在本发明的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本发明,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
19.请着重参照附图1-3,本发明提供一种技术方案:一种机械零件加工用可精确定位的四轴机器人抓手,包括顶板1,所述顶板1上方设有驱动机构2,所述顶板1上端安装有连接座11,所述连接座11一侧设有嵌设在顶板1上的裁切模侧上下气缸12,所述裁切模侧上下气缸12下端连接有裁切模安装板3,所述裁切模安装板3下端安装有裁切模移动板31,所述裁切模安装板3一侧连接有模具侧移动板41,所述模具侧移动板41上端设有和顶板1连接的模具侧安装板4,所述模具侧移动板41下端设有四组模具侧夹取气缸42,所述裁切模移动板31下端安装有四组裁切模侧夹取气缸32,所述模具侧夹取气缸42和裁切模侧夹取气缸32上皆安装有固定抓手14,所述固定抓手14内部抓取有产品6,所述模具侧安装板4下端两侧安装有模具侧限位杆44。启动裁切模侧上下气缸12,驱动模具侧安装板4下移,从而使得模具侧移动板41和裁切模移动板31下移,模具侧夹取气缸42通过固定抓手14对成型模具中的产品6进行抓取,裁切模侧夹取气缸32通过固定抓手14对裁切模具中的产品6进行抓取,然后裁切模侧上下气缸12驱动模具侧安装板4上移,电动滑块22带动四轴机器人抓手移动,模具侧安装板4再次下移,模具侧旋转气缸43驱动模具侧夹取气缸42转动,使得模具侧夹取气缸42抓取的产品6进入裁切模具中,裁切模侧夹取气缸32抓取的产品6落到下一工序的输送承座上。
20.请着重参照附图1-5,所述模具侧移动板41和裁切模移动板31下端皆安装有两个定位柱7,每个所述定位柱7内部下端皆滑动有压板701,所述压板701下端连接有贯穿定位柱7的顶杆702,所述压板701上端设有和定位柱7内壁连接的限位板703,所述限位板703内部滑动连接有传动杆704,所述传动杆704下端和压板701连接,所述传动杆704上套设有弹簧705,所述弹簧705两端分别和压板701、限位板703连接,所述传动杆704上端连接有升降板706,所述升降板706侧壁上设有环凹槽707,所述定位柱7内壁上设有导向环凹槽708,所述导向环凹槽708和环凹槽707之间设有滑动球709,所述滑动球709滑动在导向环凹槽708和环凹槽707内部,所述导向环凹槽708上端设有和定位柱7内壁连接的固定挡板710,所述固定挡板710上滑动有两个曲杆711,两个所述曲杆711下端皆和升降板706连接,且两个所述曲杆711上端皆连接有和定位柱7内壁滑动连接的阻气板712,所述定位柱7顶端设有进气道713、回气道714和排气道715,所述导向环凹槽708上设有若干个最高处716、中点717和最低点718,且若干个所述最高处716、中点717和最低点718交错分布,当所述滑动球709位于
最高处716和中点717之间时,所述回气道714被阻气板712阻挡,所述定位柱7最低端和模具侧旋转气缸43、裁切模侧夹取气缸32最下端位于同一水平面上。在模具侧安装板4下移的时候,进气道713进气,进入的气体通过回气道714回流,定位柱7跟随下移,直到顶杆702和模具接触,此时,固定抓手14位于产品6两侧,顶杆702在压力的作用下上移,使得弹簧705收缩,传动杆704推动升降板706上移,滑动球709在升降板706的带动下上移,从导向环凹槽708的最低点718向上移动,曲杆711随着升降板706的上移而上移,阻气板712也上移,直到滑动球709移动到最高处716,阻气板712将回气道714挡住,同时排气道715不再被遮挡,通过进气道713进入的气体,会通过排气道715将气体输送进模具侧夹取气缸42或裁切模侧夹取气缸32,使得模具侧夹取气缸42或裁切模侧夹取气缸32驱动固定抓手14对产品6进行夹持。
21.请着重参照附图1-4,所述驱动机构2包括电动导轨21,所述电动导轨21上滑动有电动滑块22,所述电动滑块22和连接座11连接,启动电动导轨21,使得电动滑块22移动,从而使得电动滑块22带动四轴机器人抓手移动,所述模具侧安装板4一侧安装有电磁阀组5,所述裁切模侧上下气缸12输出端和输出端、模具侧夹取气缸42输出端、裁切模侧夹取气缸32输出端皆和电磁阀组5通过软管连接,所述排气道715和相邻的两个模具侧夹取气缸42或裁切模侧夹取气缸32输入端连接,裁切模侧上下气缸12是由电磁阀组5上的电磁阀控制上下的气缸,模具侧夹取气缸42的排气、裁切模侧夹取气缸32的排气皆由电磁阀组5上的电磁阀控制,进气道713和回气道714的进气皆由电磁阀组5上的电磁阀控制。
22.请着重参照附图1-5,所述裁切模安装板3和模具侧安装板4侧壁上皆安装有若干个球头柱塞13,球头柱塞13是可以提供压力和精准定位的元件,所述模具侧移动板41上端安装有四组模具侧旋转气缸43,每个所述模具侧旋转气缸43输出端皆和对应的模具侧夹取气缸42连接,模具侧旋转气缸43用于驱动模具侧夹取气缸42转动,所述模具侧夹取气缸42和裁切模侧夹取气缸32下端分别设有成型模具和裁切模具,所述裁切模具远离成型模具一侧设有输送承座,成型模具和裁切模具之间的间距、裁切模具和输送承座之间的间距与模具侧夹取气缸42和裁切模侧夹取气缸32之间的间距相等。
23.本发明的具体操作流程如下:使用者使用本四轴机器人抓手时,首先等成型模具注塑完产品6,然后启动电动导轨21,使得电动滑块22移动,从而使得电动滑块22带动四轴机器人抓手移动,四轴机器人抓手从原点位移动到模具上方,此时,模具侧夹取气缸42位于成型模具正上方,裁切模侧夹取气缸32位于裁切模具正上方,启动裁切模侧上下气缸12,驱动模具侧安装板4下移,从而使得模具侧移动板41和裁切模移动板31下移,在模具侧安装板4下移的时候,进气道713进气,进入的气体通过回气道714回流,定位柱7跟随下移,直到顶杆702和模具接触,此时,固定抓手14位于产品6两侧,顶杆702在压力的作用下上移,使得弹簧705收缩,传动杆704推动升降板706上移,滑动球709在升降板706的带动下上移,从导向环凹槽708的最低点718向上移动,曲杆711随着升降板706的上移而上移,阻气板712也上移,直到滑动球709移动到最高处716,阻气板712将回气道714挡住,同时排气道715不再被遮挡,通过进气道713进入的气体,会通过排气道715将气体输送进模具侧夹取气缸42或裁切模侧夹取气缸32,使得模具侧夹取气缸42和裁切模侧夹取气缸32驱动固定抓手14对产品6进行夹持,然后裁切模侧上下气缸12驱动模具侧安装板4上移,电动滑块22带动四轴机器人抓手移动,模具侧安装板4再次
下移,模具侧旋转气缸43驱动模具侧夹取气缸42转动,使得模具侧夹取气缸42抓取的产品6进入裁切模具中,裁切模侧夹取气缸32抓取的产品6落到下一工序的输送承座上,通过电磁阀组5将模具侧夹取气缸42或裁切模侧夹取气缸32内部气体排出,使得固定抓手14不再对产品6夹持,放完产品6,升起回到原点位,进行下一次移动。
24.上述结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的这种非实质改进,或未经改进将本发明的构思和技术方案直接应用于其他场合的,均在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。