技术特征:
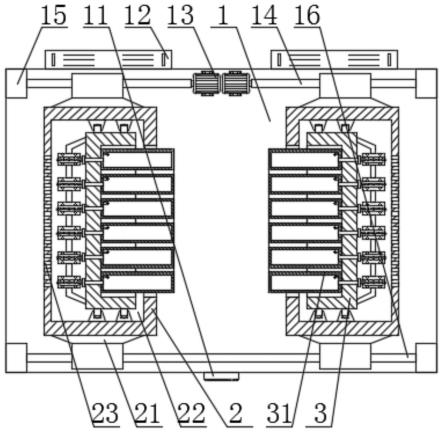
1.一种机械零件加工用可精确定位的四轴机器人抓手,包括顶板(1),其特征在于:所述顶板(1)上方设有驱动机构(2),所述顶板(1)上端安装有连接座(11),所述连接座(11)一侧设有嵌设在顶板(1)上的裁切模侧上下气缸(12),所述裁切模侧上下气缸(12)下端连接有裁切模安装板(3),所述裁切模安装板(3)下端安装有裁切模移动板(31),所述裁切模安装板(3)一侧连接有模具侧移动板(41),所述模具侧移动板(41)上端设有和顶板(1)连接的模具侧安装板(4),所述模具侧移动板(41)下端设有四组模具侧夹取气缸(42),所述裁切模移动板(31)下端安装有四组裁切模侧夹取气缸(32),所述模具侧夹取气缸(42)和裁切模侧夹取气缸(32)上皆安装有固定抓手(14),所述固定抓手(14)内部抓取有产品(6);所述模具侧安装板(4)下端两侧安装有模具侧限位杆(44),所述模具侧移动板(41)和裁切模移动板(31)下端皆安装有两个定位柱(7),每个所述定位柱(7)内部下端皆滑动有压板(701),所述压板(701)下端连接有贯穿定位柱(7)的顶杆(702),所述压板(701)上端设有和定位柱(7)内壁连接的限位板(703),所述限位板(703)内部滑动连接有传动杆(704),所述传动杆(704)下端和压板(701)连接,所述传动杆(704)上套设有弹簧(705),所述弹簧(705)两端分别和压板(701)、限位板(703)连接,所述传动杆(704)上端连接有升降板(706),所述升降板(706)侧壁上设有环凹槽(707),所述定位柱(7)内壁上设有导向环凹槽(708),所述导向环凹槽(708)和环凹槽(707)之间设有滑动球(709),所述滑动球(709)滑动在导向环凹槽(708)和环凹槽(707)内部,所述导向环凹槽(708)上端设有和定位柱(7)内壁连接的固定挡板(710),所述固定挡板(710)上滑动有两个曲杆(711),两个所述曲杆(711)下端皆和升降板(706)连接,且两个所述曲杆(711)上端皆连接有和定位柱(7)内壁滑动连接的阻气板(712),所述定位柱(7)顶端设有进气道(713)、回气道(714)和排气道(715)。2.根据权利要求1所述的一种机械零件加工用可精确定位的四轴机器人抓手,其特征在于:所述驱动机构(2)包括电动导轨(21),所述电动导轨(21)上滑动有电动滑块(22),所述电动滑块(22)和连接座(11)连接。3.根据权利要求1所述的一种机械零件加工用可精确定位的四轴机器人抓手,其特征在于:所述模具侧安装板(4)一侧安装有电磁阀组(5),所述裁切模侧上下气缸(12)输出端和输出端、模具侧夹取气缸(42)输出端、裁切模侧夹取气缸(32)输出端皆和电磁阀组(5)通过软管连接,所述排气道(715)和相邻的两个模具侧夹取气缸(42)或裁切模侧夹取气缸(32)输入端连接。4.根据权利要求1所述的一种机械零件加工用可精确定位的四轴机器人抓手,其特征在于:所述裁切模安装板(3)和模具侧安装板(4)侧壁上皆安装有若干个球头柱塞(13)。5.根据权利要求1所述的一种机械零件加工用可精确定位的四轴机器人抓手,其特征在于:所述模具侧移动板(41)上端安装有四组模具侧旋转气缸(43),每个所述模具侧旋转气缸(43)输出端皆和对应的模具侧夹取气缸(42)连接,所述定位柱(7)最低端和模具侧旋转气缸(43)、裁切模侧夹取气缸(32)最下端位于同一水平面上。6.根据权利要求1所述的一种机械零件加工用可精确定位的四轴机器人抓手,其特征在于:所述模具侧夹取气缸(42)和裁切模侧夹取气缸(32)下端分别设有成型模具和裁切模具,所述裁切模具远离成型模具一侧设有输送承座。7.根据权利要求1所述的一种机械零件加工用可精确定位的四轴机器人抓手,其特征在于:所述导向环凹槽(708)上设有若干个最高处(716)、中点(717)和最低点(718),且若干
个所述最高处(716)、中点(717)和最低点(718)交错分布,当所述滑动球(709)位于最高处(716)和中点(717)之间时,所述回气道(714)被阻气板(712)阻挡。
技术总结
本发明公开了一种机械零件加工用可精确定位的四轴机器人抓手,包括顶板,所述顶板上方设有驱动机构,所述顶板上端安装有连接座,所述连接座一侧设有嵌设在顶板上的裁切模侧上下气缸,所述裁切模侧上下气缸下端连接有裁切模安装板,所述裁切模安装板下端安装有裁切模移动板,所述裁切模安装板一侧连接有模具侧移动板,所述模具侧移动板上端设有和顶板连接的模具侧安装板,所述模具侧安装板下端两侧安装有模具侧限位杆,所述模具侧移动板和裁切模移动板下端皆安装有两个定位柱。本发明采用了自动运行、自动夹取产品,避免夹持位置出现偏差,同时在定位柱和模具接触时,固定抓手进行抓取,从而解决了夹取不到产品的风险,提高了工作效率。工作效率。工作效率。
技术研发人员:陶野 黄明 桂卫星 汪莉
受保护的技术使用者:安徽天思朴超精密模具有限公司
技术研发日:2022.08.24
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。