1.本发明涉及机器人技术领域,具体为一种消防机器人机械臂。
背景技术:
2.机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器,随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人。目前消防中使用的机械臂在抓取重物时通常会对水平转向机构造成较大的负担,容易使转轴发生弯曲,从而加剧磨损,并且抓取重物时容易倾倒。
技术实现要素:
3.为实现以上目的,本发明通过以下技术方案予以实现:一种消防机器人机械臂,包括固定底座;该固定底座具有圆盘状结构,以及开设在所述固定底座顶部的转动槽,所述转动槽内壁通过轴承转动连接有转动臂,所述转动臂底部固定连接有驱动机构,所述固定底座顶部位于转动臂外侧的部分固定连接有防护装置;所述防护装置包括:固定圈,该固定圈具有环形板状结构,以及设置在所述固定圈顶部的加强条,所述加强条顶部与固定圈底部固定连接,所述固定圈侧面开设有环形卡槽;挤压气囊,该挤压气囊具有环形结构,以及设置在所述挤压气囊一侧的控制套筒,所述挤压气囊和控制套筒底部均固定连接有连接支架;气管,该气管具有细管状结构,以及设置在所述气管一端内壁的活塞推杆,所述气管通过固定支架与控制套筒内壁固定连接,所述气管远离活塞推杆的一端与挤压气囊连通,所述控制套筒内壁正对活塞推杆的部分固定连接有控制开关;转动卡杆,该转动卡杆一端与固定底座顶部连接,所述转动卡杆与控制开关电性连接。
4.设置有防护装置,使用时当转动臂抓取重物时,重物的重力作用在转动臂上,使转动臂产生向一侧倾斜的趋势,当重物较重,转动臂产生轻微倾斜时,挤压到挤压气囊,挤压气囊内部气压增大推动气管内部的活塞推杆挤压控制开关,即可通过控制开关控制转动卡杆转动卡在固定圈外侧的环形卡槽上,通过转动卡杆对固定圈进行限位,即可通过固定圈对转动臂进行限位,避免转动臂倾斜程度较大导致磨损加剧的情况,设置有挤压气囊和气管,可通过挤压气囊内部的气压变化实现精确控制,反应灵敏,控制精度较高。
5.优选的,所述固定圈套设在转动臂上并与转动臂固定连接,所述挤压气囊套设在转动臂上,所述连接支架底部与固定底座顶部固定连接。
6.优选的,所述活塞推杆位于气管外部的一端固定连接有挤压块,所述转动卡杆设置有多组并且呈环状均匀分布在固定圈下方。
7.优选的,所述转动卡杆包括转动座,所述转动座上通过转动栓转动连接有连接台,所述连接台顶部固定连接有连接架,所述连接架顶部贯穿并滑动连接有顶座,所述顶座侧面固定连接有卡块,所述连接台顶部和顶座底部均固定连接有电磁铁,设置有转动卡杆,当控制开关触发时,转动卡杆内部的转动座带动连接台转动,连接台通过连接架带动顶座转动,即可通过顶座带动卡块插入环形卡槽内部,同时连接台和顶座上的电磁铁通电产生磁性并相互吸引,可通过电磁铁之间的强磁吸引,将固定圈向下拉动,从而将固定圈的位置摆正,即可通过固定圈将转动臂的位置摆正,避免转动臂倾斜导致的磨损加剧的情况。
8.优选的,所述转动座底部与固定底座顶部固定连接,所述转动座通过驱动电机驱动,所述转动座上的驱动电机和电磁铁均通过控制开关控制。
9.优选的,所述固定底座外侧套设并固定连接有支撑装置,所述支撑装置包括支撑圈,所述支撑圈外侧固定连接有环形导轨,所述环形导轨内壁通过移动滑块滑动连接有固定座,所述固定座顶部贯穿有液压推杆,所述液压推杆倾斜设置在固定座上,所述液压推杆的活动端转动连接有支撑板。
10.优选的,所述支撑圈套设在固定底座上并与固定底座固定连接,所述液压推杆与固定座之间设置有角度调节机构。
11.优选的,所述固定座顶部固定连接有移动支架,所述移动支架远离固定座的一端与转动臂侧面固定连接,设置有支撑装置,当转动臂转动时,通过移动支架带动固定座转动,固定座带动液压推杆移动,当转动臂转动至抓取位置时,液压推杆伸长,带动支撑板挤压在地面上,可通过液压推杆和支撑板对转动臂实现抓取的一侧进行支撑,避免装置发生倾倒的情况,固定座可通过移动支架带动液压推杆和支撑板随转动臂一起转动,方便适应转动臂的转动,使得转动臂转动至任意角度进行抓取时均能够通过液压推杆和支撑板进行支撑,使用效果较好。
12.优选的,所述支撑板包括板体,所述板体顶部开设有转动凹槽,所述板体底部固定连接有卡齿。
13.优选的,所述转动凹槽内壁通过转动栓与液压推杆端部转动连接,所述卡齿设置有多组并且均倾斜分布在板体上,设置有支撑板,由于支撑板内部的板体可通过转动凹槽在液压推杆端部转动,因此可通过板体的转动适应凹凸不平的地面,并且可通过卡齿对地面进行挤压卡紧,使得支撑效果更加稳定。
14.本发明提供了一种消防机器人机械臂。具备以下有益效果:1、该一种消防机器人机械臂,设置有防护装置,使用时当转动臂抓取重物时,重物的重力作用在转动臂上,使转动臂产生向一侧倾斜的趋势,当重物较重,转动臂产生轻微倾斜时,挤压到挤压气囊,挤压气囊内部气压增大推动气管内部的活塞推杆挤压控制开关,即可通过控制开关控制转动卡杆转动卡在固定圈外侧的环形卡槽上,通过转动卡杆对固定圈进行限位,即可通过固定圈对转动臂进行限位,避免转动臂倾斜程度较大导致磨损加剧的情况,设置有挤压气囊和气管,可通过挤压气囊内部的气压变化实现精确控制,反应灵敏,控制精度较高。
15.2、该一种消防机器人机械臂,设置有转动卡杆,当控制开关触发时,转动卡杆内部
的转动座带动连接台转动,连接台通过连接架带动顶座转动,即可通过顶座带动卡块插入环形卡槽内部,同时连接台和顶座上的电磁铁通电产生磁性并相互吸引,可通过电磁铁之间的强磁吸引,将固定圈向下拉动,从而将固定圈的位置摆正,即可通过固定圈将转动臂的位置摆正,避免转动臂倾斜导致的磨损加剧的情况。
16.3、该一种消防机器人机械臂,设置有支撑装置,当转动臂转动时,通过移动支架带动固定座转动,固定座带动液压推杆移动,当转动臂转动至抓取位置时,液压推杆伸长,带动支撑板挤压在地面上,可通过液压推杆和支撑板对转动臂实现抓取的一侧进行支撑,避免装置发生倾倒的情况,固定座可通过移动支架带动液压推杆和支撑板随转动臂一起转动,方便适应转动臂的转动,使得转动臂转动至任意角度进行抓取时均能够通过液压推杆和支撑板进行支撑,使用效果较好。
17.4、该一种消防机器人机械臂,设置有支撑板,由于支撑板内部的板体可通过转动凹槽在液压推杆端部转动,因此可通过板体的转动适应凹凸不平的地面,并且可通过卡齿对地面进行挤压卡紧,使得支撑效果更加稳定。
附图说明
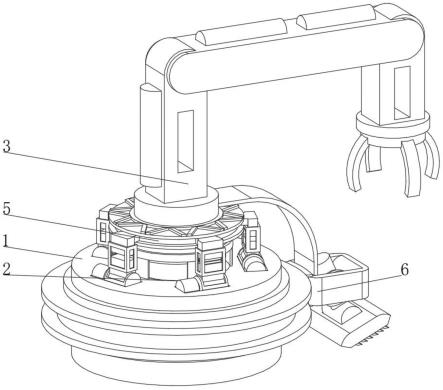
18.图1为本发明结构示意图;图2为本发明防护装置连接结构示意图;图3为本发明防护装置结构示意图;图4为本发明防护装置截面结构示意图;图5为本发明控制套筒内部结构示意图;图6为本发明转动卡杆结构示意图;图7为本发明支撑装置结构示意图;图8为本发明支撑板结构示意图。
19.图中:1、固定底座;2、转动槽;3、转动臂;5、防护装置;51、固定圈;52、加强条;53、环形卡槽;54、挤压气囊;55、控制套筒;56、气管;57、活塞推杆;58、控制开关;59、转动卡杆;591、转动座;592、连接台;593、连接架;594、顶座;595、卡块;596、电磁铁;50、连接支架;6、支撑装置;61、支撑圈;62、环形导轨;63、固定座;64、液压推杆;65、支撑板;651、板体;652、转动凹槽;653、卡齿;67、移动支架。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.实施例一:请参阅图1-图5,本发明提供一种技术方案:一种消防机器人机械臂,包括固定底座1;该固定底座1具有圆盘状结构,以及开设在固定底座1顶部的转动槽2,转动槽2内壁通过轴承转动连接有转动臂3,转动臂3底部固定连接有驱动机构,固定底座1顶部位于转
动臂3外侧的部分固定连接有防护装置5;防护装置5包括:固定圈51,该固定圈51具有环形板状结构,以及设置在固定圈51顶部的加强条52,加强条52顶部与固定圈51底部固定连接,固定圈51侧面开设有环形卡槽53;挤压气囊54,该挤压气囊54具有环形结构,以及设置在挤压气囊54一侧的控制套筒55,挤压气囊54和控制套筒55底部均固定连接有连接支架50;气管56,该气管56具有细管状结构,以及设置在气管56一端内壁的活塞推杆57,气管56通过固定支架与控制套筒55内壁固定连接,气管56远离活塞推杆57的一端与挤压气囊54连通,控制套筒55内壁正对活塞推杆57的部分固定连接有控制开关58;转动卡杆59,该转动卡杆59一端与固定底座1顶部连接,转动卡杆59与控制开关58电性连接。
22.固定圈51套设在转动臂3上并与转动臂3固定连接,挤压气囊54套设在转动臂3上,连接支架50底部与固定底座1顶部固定连接。
23.活塞推杆57位于气管56外部的一端固定连接有挤压块,转动卡杆59设置有多组并且呈环状均匀分布在固定圈51下方。
24.设置有防护装置5,使用时当转动臂3抓取重物时,重物的重力作用在转动臂上3,使转动臂3产生向一侧倾斜的趋势,当重物较重,转动臂3产生轻微倾斜时,挤压到挤压气囊54,挤压气囊54内部气压增大推动气管56内部的活塞推杆57挤压控制开关58,即可通过控制开关58控制转动卡杆59转动卡在固定圈51外侧的环形卡槽53上,通过转动卡杆59对固定圈51进行限位,即可通过固定圈51对转动臂3进行限位,避免转动臂3倾斜程度较大导致磨损加剧的情况,设置有挤压气囊54和气管56,可通过挤压气囊54内部的气压变化实现精确控制,反应灵敏,控制精度较高。
25.实施例二:请参阅图1-图6,在实施例一的基础上本发明提供一种技术方案:转动卡杆59包括转动座591,转动座591上通过转动栓转动连接有连接台592,连接台592顶部固定连接有连接架593,连接架593顶部贯穿并滑动连接有顶座594,顶座594侧面固定连接有卡块595,连接台592顶部和顶座594底部均固定连接有电磁铁596,转动座591底部与固定底座1顶部固定连接,转动座591通过驱动电机驱动,转动座591上的驱动电机和电磁铁596均通过控制开关58控制,设置有转动卡杆59,当控制开关58触发时,转动卡杆59内部的转动座591带动连接台592转动,连接台592通过连接架593带动顶座594转动,即可通过顶座594带动卡块595插入环形卡槽53内部,同时连接台592和顶座594上的电磁铁596通电产生磁性并相互吸引,可通过电磁铁596之间的强磁吸引,将固定圈51向下拉动,从而将固定圈51的位置摆正,即可通过固定圈51将转动臂3的位置摆正,避免转动臂3倾斜导致的磨损加剧的情况。
26.实施例三:请参阅图1-图7,在实施例一和实施例二的基础上本发明提供一种技术方案:固定底座1外侧套设并固定连接有支撑装置6,支撑装置6包括支撑圈61,支撑圈61外侧固定连接有环形导轨62,环形导轨62内壁通过移动滑块滑动连接有固定座63,固定座63顶部贯穿有液压推杆64,液压推杆64倾斜设置在固定座63上,液压推杆64的活动端转动连接有支撑板65,支撑圈61套设在固定底座1上并与固定底座1固定连接,液压推杆64与固定座63之间设
置有角度调节机构,固定座63顶部固定连接有移动支架67,移动支架67远离固定座63的一端与转动臂3侧面固定连接,设置有支撑装置6,当转动臂3转动时,通过移动支架67带动固定座63转动,固定座63带动液压推杆64移动,当转动臂3转动至抓取位置时,液压推杆64伸长,带动支撑板65挤压在地面上,可通过液压推杆64和支撑板65对转动臂3实现抓取的一侧进行支撑,避免装置发生倾倒的情况,固定座63可通过移动支架67带动液压推杆64和支撑板65随转动臂3一起转动,方便适应转动臂3的转动,使得转动臂3转动至任意角度进行抓取时均能够通过液压推杆64和支撑板65进行支撑,使用效果较好。
27.实施例四:请参阅图1-图8,在实施例一、实施例二和实施例三的基础上本发明提供一种技术方案:支撑板65包括板体651,板体651顶部开设有转动凹槽652,板体651底部固定连接有卡齿653,转动凹槽652内壁通过转动栓与液压推杆64端部转动连接,卡齿653设置有多组并且均倾斜分布在板体651上,设置有支撑板65,由于支撑板65内部的板体651可通过转动凹槽652在液压推杆64端部转动,因此可通过板体651的转动适应凹凸不平的地面,并且可通过卡齿653对地面进行挤压卡紧,使得支撑效果更加稳定。
28.显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域及相关领域的普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。本发明中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。