1.本实用新型涉及储能技术领域,具体而言涉及一种储能集装箱机械臂控制装置。
背景技术:
2.随着电化学储能技术的发展,电化学储能以其电能保存时间长,储能电池技术成熟,充放电速度快等优点成为当下主流的储能方式。
3.但是,现有的储能消防系统只能在电池完全热失控,烟雾蔓延至整个舱室时,烟雾传感器才会报警,对电化学储能舱室造成不可挽回的损失;电池发生热失控时,专业人员手动取出热失控的电池具有极大的安全风险。
4.因此,亟需一种对储能集装箱内有热失控风险的电池进行及时预警、精准抑制处置和对专业人员没有安全隐患的储能集装箱机械臂控制装置是本领域技术人员迫切需要解决的技术问题。
技术实现要素:
5.本技术正是基于现有技术的上述需求而提出的,本技术要解决的技术问题是提供一种储能集装箱机械臂控制装置,对储能集装箱内有热失控风险的电池进行及时预警和精准抑制处置。
6.为了解决上述问题,本技术提供的技术方案包括:
7.提供了一种储能集装箱机械臂控制装置,包括:储能集装箱,机械臂,电池回收箱,所述储能集装箱包括电池模块,用于储存电能和对外接设备提供电能;所述电池模块上设置有信号异常检测单元;所述机械臂根据异常信号将电池模块取出;所述电池回收箱用于存放取出的电池模块。
8.本实用新型的一种优选的具体实施方式,所述储能集装箱内还设置有有毒气体传感器,所述有毒气体传感器和信号异常检测单元分别与控制器信号连接,所述控制器与所述机械臂信号连接。
9.本实用新型的一种优选的具体实施方式,所述信号异常检测单元包括温度传感器和电压检测模块。
10.本实用新型的一种优选的具体实施方式,还包括导航磁条,所述导航磁条环绕所述储能集装箱设置。
11.本实用新型的一种优选的具体实施方式,所述机械臂固定设置于无人搬运车上,所述无人搬运车沿所述导航磁条移动。
12.本实用新型的一种优选的具体实施方式,所述有毒气体传感器包括co气体传感器和h2气体传感器。
13.本实用新型的一种优选的具体实施方式,所述储能集装箱内设置有多组电池簇,所述电池簇包括电池模块,每组电池模块可单独进行拆卸。
14.本实用新型的一种优选的具体实施方式,所述储能集装箱设置有舱门,所述舱门
为自动开关门。
15.本实用新型的一种优选的具体实施方式,所述舱门内侧设置有启动器和驱动器;所述启动器与控制器信号连接;所述驱动器驱动所述舱门打开或关闭。
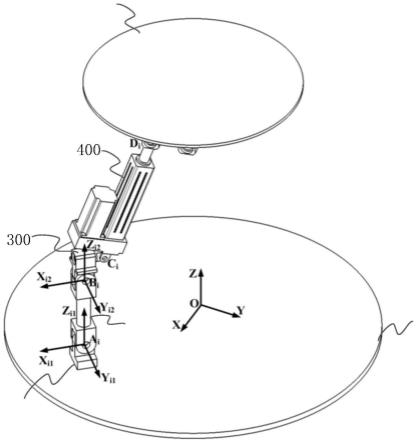
16.本实用新型的一种优选的具体实施方式,所述电池模块端面设置有抓取扶手,所述抓取扶手中间部位设置有凹槽;所述机械臂前端设置有机械爪,所述机械爪通过抓取所述抓取扶手将所述电池模块取出。
17.本实用新型提供了一种储能集装箱机械臂控制装置,具有以下有益效果:
18.1.所述储能集装箱内设置有信号异常检测单元,信号异常检测单元与控制器信号连接,并将电池模块的温度和电压上传至控制器,控制器根据预先设定的程序和多种传感器监测的参数值,综合判断电池模块是否有发生热失控的风险,如果有发生热失控的风险,控制器发出异常信号通知专业人员,专业人员手动控制机械臂根据异常信号将所述电池模块取出,或者控制器将异常信号的电池模块定位信息传输至机械臂,机械臂根据异常信号取出电池模块,并存放于电池回收箱,等待专业人员处理,便于对热失控电池及时预警和精准抑制处置;
19.2.所述电池模块可单独进行拆卸,便于充放电过程中对电池模块进行精准物理剥离,而不影响整个储能集装箱的正常运行,保护储能集装箱的整体安全;
20.3.所述储能集装箱外周设置有导航磁条,所述导航磁条环绕所述储能集装箱设置,所述导航磁条上设置有无人搬运车,所述无人搬运车沿所述导航磁条移动,并按预定轨迹到达指定位置,便于实现精准定位,并沿预定路线移动;
21.4.所述舱门为自动开关门,控制器根据预先设定的程序和多种传感器监测的参数值,综合判断电池模块是否有发生热失控的风险,如果有发生热失控的风险,控制器控制对应位置的舱门自动开启,机械臂根据异常信号,取出电池模块后,所述舱门自动关闭,便于对储能集装箱的自动控制。
附图说明
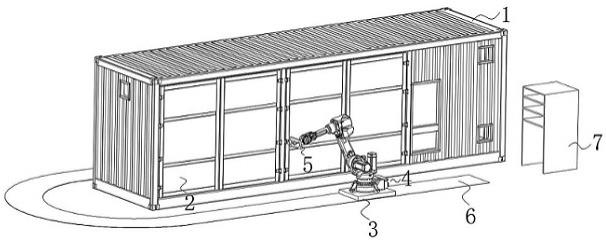
22.图1为本实用新型的一种储能集装箱机械臂控制装置的整体结构示意图;
23.图2为本实用新型的机械臂的结构示意图;
24.图3为本实用新型的电池簇的结构图;
25.图4为本实用新型的电池模块的结构图;
26.图5为本实用新型的工作过程的流程图。
27.附图标记说明:1、储能集装箱;2、舱门;3、无人搬运车;4、机械臂;5、机械爪;6、导航磁条;7、电池回收箱;8、电池簇;9、电池模块;10、抓取扶手。
具体实施方式
28.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
29.为便于对本技术实施例的理解,下面将结合附图以具体实施例做进一步的解释说
明,实施例并不构成对本技术实施例的限定。
30.本具体实施方式提供的一种储能集装箱机械臂控制装置是适用于储能集装箱电池热失控管理的机械臂控制装置;现有的储能集装箱消防系统,常常采用烟雾传感器对储能集装箱进行异常监测,也只能在电芯完全热失控起火阶段报警并进行火灾扑救,并对电化学储能舱室造成不可挽回的损失;因此,提供一种对储能集装箱内有热失控风险的电池及时预警、精准抑制处置和对专业人员没有安全隐患的机械臂控制装置是现有技术面临的主要困难。
31.本实用新型构思包括在储能集装箱内设置多组电池簇,所述电池簇包括电池模块,每组电池模块可单独进行拆卸,所述储能集装箱内设置有信号异常检测单元,所述机械臂根据异常信号将电池模块取出;所述信号异常检测单元包括温度传感器和电压检测模块;所述信号异常检测单元与控制器信号连接,并将电池模块的温度和电压上传至控制器,所述储能集装箱内还设置有有毒气体传感器,所述有毒气体传感器和控制器信号连接;控制器根据预先设定的程序和多种传感器监测的参数值,综合判断所述电池模块是否有发生热失控的风险;并且所述电池模块设置有编号,所述储能集装箱内的每组电池模块均设置有不同的编号,并按照不同组的电池簇、电池模块进行编号,并将不同编号的电池模块的定位信息传输至控制器;所述储能集装箱外侧设置有可移动机械臂,所述机械臂与控制器信号连接,所述机械臂根据异常信号定位于电池模块且有毒气体传感器检测的数据达到预定值而将有热失控风险的电池模块取出,从而保护储能集装箱的整体安全,避免火灾的发生。
32.为此本具体实施方式中提供了以下实施例。
33.本实施例提供了一种储能集装箱机械臂控制装置,参照图1至图5,包括储能集装箱1,机械臂4和电池回收箱7。
34.所述储能集装箱1内设置有多组电池簇8,用于储存电能和对外接设备提供电能。
35.所述电池簇8包括电池模块9,每组所述电池簇由多组电池模块9串联连接而成;电池簇8相对于电池模块9可以存储和释放更多的电能。
36.所述电池簇8还设置有高压箱电源,便于对每组电池簇8进行单独控制并与电网进行电能转换。
37.每组电池模块9可单独进行拆卸;具体的说,每组电池模块9上设置有公插头,与储能集装箱1上设置的母插头插接配合。便于充放电过程所述机械臂根据异常信号取出电池模块,并存放于电池回收箱7,等待专业人员处理。
38.优选的,所述储能集装箱内设置有信号异常检测单元,所述信号异常检测单元与控制器信号连接,并将电池模块9的温度和电压的检测数据上传至控制器,控制器根据预先设定的程序和多种传感器监测的参数值,综合判断所述电池模块是否有发生热失控的风险。
39.具体的说,所述信号异常检测单元包括温度传感器和电压检测模块;所述温度传感器设置于所述电池模块9上,检测电池模块的温度,并上传至控制器。锂离子电池充放电过程都会使电池的温度提升,只要电池的温度不上升到固体电解质界面膜开始溶解的温度,就不会发生电池热失控的现象。
40.所述电压检测模块设置于所述电池模块9上,检测电池模块9的充放电电压,所述电压检测模块实时检测电池模块9的充放电电压并将电池模块9的充放电电压上传至控制
器,控制器根据所述电池模块9的电压是否有急剧下跌的趋势作为判断所述电池模块是否有发生热失控的风险的判定条件之一。
41.所述电池模块9的温度达到预设温度和所述电压检测模块检测到电压有急剧下跌的趋势时,将该电池模块9定义为异常电池模块,控制器控制机械臂4移动并自动定位于所述异常电池模块。
42.所述储能集装箱1内设置有有毒气体传感器,所述有毒气体传感器和信号异常检测单元分别与控制器信号连接,所述控制器与所述机械臂信号连接。
43.具体的说,所述有毒气体传感器包括co气体传感器和h2气体传感器,检测所述储能集装箱1内所述电池模块9充放电过程中产生的有毒气体,并将有毒气体监测的参数值上传至控制器,所述控制器根据预定的程序判断有毒气体是否达到预定值。
44.当信号异常检测单元检测到温度到达预设温度和所述电压检测模块检测到电压有急剧下降的趋势时,控制器控制机械臂移动并自动定位于所述异常电池模块,有毒气体传感器检测到有毒气体达到预定值时,立即切断电源,打开储能集装箱的箱门,取出异常电池模块,并存放于电池回收箱7,等待专业人员处理。
45.或者,当有毒气体传感器检测到有毒气体达到预定值时,控制器控制机械臂移动到有毒气体传感器附近,且当信号异常检测单元检测到温度到达预设温度和所述电压检测模块检测到电压有急剧下降的趋势时,控制器控制机械臂移动并自动定位于所述异常电池模块;立即切断电源,打开储能集装箱的箱门,取出异常电池模块,并存放于电池回收箱7,等待专业人员处理。
46.通过对异常电池模块的物理剥离,将异常电池模块从储能集装箱1取出,保证储能集装箱1整体的安全,避免火灾的发生;对有热失控风险的电池及时预警和对异常电池模块的精准抑制处置,将热失控的电池进行物理剥离,既不影响储能集装箱1的正常运行,又能保证整个储能集装箱1的安全。
47.优选的,所述电池模块9设置有编号,所述储能集装箱1内的每组电池模块9均设置有不同的编号,并按照不同组的电池簇8、电池模块9进行编号;便于对电池模块9的精准定位。
48.优选的,将每组电池模块9按照不同的编号顺序将所述电池模块的空间定位上传至控制器,便于控制器识别电池模块,并控制所述机械臂移动到相应位置抓取电池模块。
49.所述储能集装箱1设置有舱门2,所述舱门2为自动开关门;所述舱门2内侧设置有启动器和驱动器;所述启动器与控制器信号连接,所述启动器控制驱动器的开启和关闭。
50.所述驱动器驱动所述舱门2打开或关闭;具体的说,所述驱动器可以为气缸,一端与舱门铰接,另一端与集装箱侧壁铰接,结构简单,成本低廉;优选的,所述舱门2的门轴上设置有第一齿轮,所述储能集装箱1上设置有伺服电机,所述伺服电机的输出轴上设置有第二齿轮,所述第二齿轮与所述第一齿轮啮合,所述伺服电机可准确的控制所述舱门2的打开或关闭。
51.所述储能集装箱外侧设置有机械臂4,信号异常检测单元与控制器信号连接,并将电池模块9的温度和电压的检测数据上传至控制器,控制器根据预先设定的程序和多种传感器监测的参数值,综合判断所述电池模块9是否有发生热失控的风险,如果有发生热失控的风险,控制器发出异常信号通知专业人员;专业人员手动控制机械臂4根据异常信号将所
述电池模块9取出,并存放于电池回收箱7。
52.优选的,控制器将异常信号的电池模块定位信息传输至机械臂,机械臂根据异常信号取出电池模块,并存放于电池回收箱,等待专业人员处理,便于对热失控电池及时预警和精准抑制处置。
53.具体的说,所述机械臂4为六轴机械臂,所述六轴机械臂为工业机器人中常用的六轴机械臂,所述六轴机械臂动作灵活,便于抓取电池模块9并将电池模块9存放于电池回收箱7,还可避免专业人员手动取出有热失控风险的电池而存在安全隐患。
54.所述机械臂4前端设置有机械爪5,所述机械爪5抓取所述电池模块9并存放于电池回收箱7。
55.具体的说,所述机械爪5包括固定板,所述固定板前端设置有活动卡爪,所述活动卡爪设置有两个,并分别设置于所述固定板的两侧。
56.优选的,所述活动卡爪设置为l型,且所述活动卡爪相对设置,并与设置于所述电池模块9端面的抓取扶手10的凹槽相适配,便于抓取电池模块9,还可防止电池模块9掉落。
57.优选的,所述活动卡爪上设置有双向气缸,所述双向气缸固定于所述固定板上,所述双向气缸的输出端与所述活动卡爪固定连接,并带所述活动卡爪朝向相互靠近或远离的方向移动,便于抓取和存放电池模块。
58.所述电池模块9端面上设置有抓取扶手10,所述抓取扶手10中间部位设置有凹槽,所述凹槽的形状和尺寸与所述活动卡爪相适配。
59.所述储能集装箱1外侧设置有导航磁条6,所述导航磁条6环绕所述储能集装箱1设置;具体的说,所述导航磁条6呈u型并被配置为环绕所述储能集装箱1设置。
60.优选的,所述无人搬运车3与控制器信号连接,所述控制器按照预定程序控制所述无人搬运车3沿导航磁条6运行到指定位置。
61.优选的,所述无人搬运车3采用激光导航,所述无人搬运车3根据控制器按照预定程序控制所述无人搬运车运行到指定位置;不需设置导航磁条,导航精度高。
62.优选的,所述机械臂4设置于所述无人搬运车3上,根据异常信号自动定位于所述电池模块9,并取出电池模块9存放于电池回收箱7,等待专业人员处理。
63.控制器根据信号异常检测单元检测的数据和有毒气体传感器检测的数据,综合判断所述电池模块9是否有发生热失控的风险,如果有发生热失控的风险,所述控制器将所述电池模块9的数据信号定义为异常信号,并将异常信号的电池模块的定位信息传输至机械臂4和无人搬运车3,机械臂4和无人搬运车3根据异常信号的电池模块定位信息定位于所述电池模块9,并取出电池模块9存放于电池回收箱7,等待专业人员处理,便于对储能集装箱1内有热失控风险的电池进行及时预警和精准抑制处置。
64.所述电池回收箱7设置于所述储能集装箱1一侧,用于存放电池模块。
65.具体的说,所述电池回收箱7设置有多个腔室,所述电池模块存放于所述电池回收箱7内,可以存放更多的电池模块9,使专业人员可以集中处理。
66.机械臂控制装置的工作流程为:
67.1.多种传感器危险源检测,多种传感器包括温度传感器,电压检测模块,有毒气体传感器,并将检测数据上传至控制器;
68.2.控制器根据预定程序和多种传感器监测的参数值,综合判断电池模块是否有发
生热失控的风险,如果电池模块有发生热失控的风险,切断高压箱电源,储能变流器pcs切换到停止状态;
69.3.开启对应位置的储能集装箱舱门,机械臂根据异常信号定位到电池模块;
70.4.机械臂取出电池模块;
71.5.关闭储能集装箱舱门;
72.6.电池模块放置到电池回收箱,等待专业人员处理。
73.以上所述的具体实施方式,对本技术的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本技术的具体实施方式而已,并不用于限定本技术的保护范围,凡在本技术的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。