1.本发明涉及一种机器人系统及其运转方法。
背景技术:
2.已知一种自行运动式托盘运送机器人,其管理患者在与不在,并通过机器人自行运动将采血管准备室内准备好的室内患者的采血管收纳托盘供给到采血台上(例如参照专利文献1)。
3.专利文献1所公开的自行运动式托盘运送机器人中,检查受理单使用rf-id等的非接触式介质,在采血室的入口门上设置前述非接触式介质的阅读器,从而核查该患者的进出。
4.而且,在患者不在的情况下,自行运动式托盘运送机器人接收由采血管准备装置自动准备好的托盘并存放在规定的存放部,患者在采血室的情况下,其自行运动并供给到收到请求的采血台上,由此进行医疗行为的辅助。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2007-130282号公报
技术实现要素:
8.然而,近年来sars、mers、covid-19之类的冠状病毒引起的传染病扩散。此外,由冠状病毒以外的病毒或各种细菌引起的传染病也是众所周知的。
9.针对疑似有这些传染病的患者,采集黏膜等的检验体来执行pcr检查等检查,进行有无感染的诊断,但采集检验体的医疗从业人员本身有可能感染病毒等。
10.此外,与感染了病毒等的患者接触的医疗从业人员在执行检查之后直至确认感染之间,由于在医院内进行移动,有可能造成在医院内的其他疾病的患者等感染病毒等。
11.在此,本发明人发现通过远程操作使机器人从事对疑似感染有病毒等的患者的检查、诊疗行为,从而能够充分降低在医院内的医疗从业人员等的感染,进而想到了本发明。
12.本发明的目的在于提供一种能够充分降低在医院内的医疗从业人员等的感染的机器人系统及其运转方法。
13.为了解决上述现有课题,本发明所涉及的机器人系统具备:具备臂的机器人,该臂具有对医疗检查器具和/或医疗诊疗器具进行保持的手;操作器,其被构成为对所述机器人进行操作;以及控制装置,配置有所述机器人的第一空间与配置有所述操作器的第二空间被隔开,所述控制装置被构成为执行:(a)使所述机器人自行运动以靠近所述患者;(b)在所述(a)执行后,基于从所述操作器输入的所述臂和/或所述手的操作指令信息,使所述臂和/或所述手进行动作。
14.由此,医疗从业人员在与患者隔开的空间对机器人进行操作,从而能够抑制与疑似感染病毒等的患者的接触。因此,能够充分抑制病毒等对医疗从业人员的感染。
15.此外,通过机器人移动到处于各病房等的患者附近,从而医疗从业人员无需在医院内进行移动。因此,能够充分抑制对医疗从业人员的感染。
16.而且,通过将针对疑似有传染病的患者的机器人和针对其他的疾病患者的机器人区分使用,从而能够充分抑制对其他的疾病患者的感染。
17.此外,本发明所涉及的机器人系统具备:具备臂的机器人,该臂具有对医疗检查器具和/或医疗诊疗器具进行保持的手;操作器,其被构成为对所述机器人进行操作;以及控制装置,配置有所述机器人的第一空间与配置有所述操作器的第二空间被隔开,在所述手上配置有第一拍摄装置,所述控制装置被构成为执行(α),即,基于从所述操作器输入的所述臂和/或所述手的操作指令信息,使所述臂和/或所述手进行动作。
18.由此,医疗从业人员在与患者隔开的空间对机器人进行操作,从而能够抑制与疑似有病毒等的感染的患者的接触。因此,能够充分抑制病毒等对医疗从业人员的感染。
19.此外,本发明所涉及的机器人系统的运转方法为,机器人系统具备:具备臂的机器人,该臂具有对医疗检查器具和/或医疗诊疗器具进行保持的手;操作器,其被构成为对所述机器人进行操作,配置有所述机器人的第一空间与配置有所述操作器的第二空间被隔开,该机器人系统的运转方法具备:(a)所述机器人自行运动以靠近所述患者;(b)在所述(a)执行后,所述臂和/或所述手基于从所述操作器输入的所述臂和/或所述手的操作指令信息进行动作。
20.由此,医疗从业人员在与患者隔开的空间对机器人进行操作,从而能够抑制与疑似有病毒等感染的患者的接触。因此,能够充分抑制病毒等对医疗从业人员的感染。
21.此外,通过机器人移动到在各病房等的患者附近,从而医疗从业人员无需在医院内进行移动。因此,能够充分抑制对医疗从业人员的感染。
22.而且,通过将针对疑似有传染病的患者的机器人与针对其他的疾病患者的机器人区分使用,从而能够充分抑制对其他的疾病患者的感染。
23.此外,本发明所涉及的机器人系统的运转方法为,所述机器人系统具备:具备臂的机器人,该臂具有对医疗检查器具和/或医疗诊疗器具进行保持的手;操作器,其被构成为对所述机器人进行操作,配置有所述机器人的第一空间与配置有所述操作器的第二空间被隔开,该机器人系统的运转方法具备(α),即,在所述手上配置有第一拍摄装置,所述臂和/或所述手基于从所述操作器输入的所述臂和/或所述手的操作指令信息进行动作。
24.由此,医疗从业人员在与患者隔开的空间对机器人进行操作,从而能够抑制与疑似有病毒等的感染的患者的接触。因此,能够充分抑制病毒等对医疗从业人员的感染。
25.通过参照附图并从以下的优选实施方式的详细的说明中可明确本发明的上述目的、其他的目的、特征、以及优点。
26.根据本发明的机器人系统及其运转方法,能够充分降低在医院内的医疗从业人员等的感染。
附图说明
27.图1为表示本实施方式1所涉及的机器人系统的概要结构的示意图。
28.图2为表示本实施方式1所涉及的机器人系统的概要结构的示意图。
29.图3为表示图1及图2所示的机器人系统中的机器人的概要结构的示意图。
30.图4为表示本实施方式1所涉及的机器人系统中的机器人的手的概要结构的示意图。
31.图5为表示本实施方式1所涉及的机器人系统的动作的一示例的流程图。
32.图6为表示本实施方式1所涉及的机器人系统的机器人的动作的一示例的示意图。
33.图7为表示图1所示的第一显示装置上所显示的图像信息和/或影像信息的一示例的示意图。
34.图8为表示图1所示的第一显示装置上所显示的图像信息和/或影像信息的其他的示例的示意图。
35.图9为表示图1所示的第一显示装置上所显示的图像信息和/或影像信息的其他的示例的示意图。
36.图10为表示图1所示的第一显示装置上所显示的图像信息和/或影像信息的其他的示例的示意图。
37.图11为表示本实施方式1中的变形例1的机器人系统的概要结构的示意图。
38.图12为表示本实施方式2所涉及的机器人系统的概要结构的示意图。
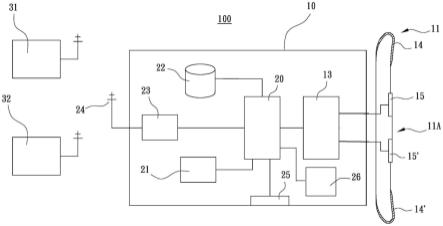
39.图13为表示本实施方式3所涉及的机器人系统的概要结构的示意图。
40.图14为表示本实施方式4所涉及的机器人系统的概要结构的示意图。
41.图15为表示本实施方式4所涉及的机器人系统的动作的一示例的流程图。
42.图16为表示本实施方式4中的变形例1的机器人系统的概要结构的示意图。
43.图17为表示本实施方式5所涉及的机器人系统的概要结构的示意图。
44.图18为表示本实施方式5所涉及的机器人系统的动作的一示例的流程图。
45.图19为表示本实施方式6所涉及的机器人系统的概要结构的示意图。
46.图20为表示本实施方式6所涉及的机器人系统的概要结构的示意图。
47.图21为表示图19所示的机器人的手的概要结构的示意图。
48.图22为表示本实施方式6所涉及的机器人系统的动作的一示例的流程图。
49.图23为表示本实施方式6中的变形例1的机器人系统的概要结构的示意图。
50.图24为表示本实施方式7所涉及的机器人系统的概要结构的示意图。
51.图25为表示本实施方式8所涉及的机器人系统的概要结构的示意图。
52.图26为表示本实施方式8所涉及的机器人系统的动作的一示例的流程图。
具体实施方式
53.以下,参照附图的同时对本发明的实施方式进行说明。另外,在所有的附图中,对同一或相当部分标注同一符号,并省略重复的说明。此外,在所有的附图中,选取用于说明本技术的构成要素来进行图示,关于其他的构成要素,有时会省略图示。而且,本技术并不局限于以下的实施方式。
54.(实施方式1)
55.本实施方式1所涉及的机器人系统具备:具备臂的机器人,该臂具有对医疗检查器具和/或医疗诊疗器具进行保持的手;操作器,其被构成为对机器人进行操作;以及控制装置,配置有机器人的第一空间与配置有操作器的第二空间被隔开,控制装置被构成为执行:(a)使机器人自行运动靠近患者;以及(b),在(a)执行后,基于从操作器输入的臂和/或手的
操作指令信息,使臂进行动作。
56.此外,本实施方式1所涉及的机器人系统中,也可以采用如下方式,即,机器人系统还具备第一拍摄装置、和被构成为显示由第一拍摄装置拍摄到的图像信息和/或影像信息的第一显示装置,控制装置被构成为,在使由第一拍摄装置拍摄到的图像信息和/或影像信息显示到第一显示装置的状态下,执行(b)。
57.此外,本实施方式1所涉及的机器人系统中,也可以采用如下方式,即,机器人和操作器以主从方式构成。
58.此外,本实施方式1所涉及的机器人系统中,也可采用如下方式,即,一对激光指示器以从该激光指示器照射的光交叉的方式被配置在手上。
59.此外,本实施方式1所涉及的机器人系统中,第一拍摄装置既可配置在机器人上,也可配置在机器人的手上。
60.此外,本实施方式1所涉及的机器人系统中,也可以采用如下方式,即,第一显示装置被构成为,显示表示医疗检查器具和/或医疗诊疗器具的位置信息的虚拟模型。
61.而且,本实施方式1所涉及的机器人系统中,也可以采用如下方式,即,操作器上配置有操作开关,该操作开关被构成为指示医疗检查器具和/或医疗诊疗器具的保持的释放。
62.本实施方式1所涉及的机器人系统的运转方法为,机器人系统具备:具备臂的机器人,该臂具有对医疗检查器具和/或医疗诊疗器具进行保持的手;操作器,其被构成为对机器人进行操作,配置有机器人的第一空间与配置有操作器的第二空间被隔开,该机器人系统的运转方法具备:(a)基于从操作器输入的患者的位置信息,机器人自动移动到患者附近;和(b),在(a)执行后,臂和/或手基于从操作器输入的臂和/或手的操作指令信息来进行动作。
63.此外,本实施方式1所涉及的机器人系统的运转方法中,也可以采用如下方式,即,机器人系统还具备第一拍摄装置、和被构成为显示由第一拍摄装置拍摄到的图像信息和/或影像信息的第一显示装置,在使由第一拍摄装置拍摄到的图像信息和/或影像信息显示到第一显示装置的状态下进行(b)。
64.此外,本实施方式1所涉及的机器人系统的运转方法中,也可以采用如下方式,即,机器人和操作器以主从方式构成。
65.此外,本实施方式1所涉及的机器人系统的运转方法中,也可以采用如下方式,即,一对激光指示器以从该激光指示器照射的光交叉的方式被配置在手上。
66.此外,本实施方式1所涉及的机器人系统的运转方法中,第一拍摄装置既可配置在机器人上,也可以配置在机器人的手上。
67.此外,本实施方式1所涉及的机器人系统的运转方法中,也可以采用如下方式,即,第一显示装置被构成为,显示表示医疗检查器具和/或医疗诊疗器具的位置信息的虚拟模型。
68.此外,本实施方式1所涉及的机器人系统的运转方法中,也可以采用如下方式,即,第一显示装置被构成为,显示患者的医疗行为对象部位的虚拟模型。
69.而且,本实施方式1所涉及的机器人系统的运转方法中,也可以采用如下方式,即,操作器上配置有操作开关,该操作开关被构成为,指示医疗检查器具和/或医疗诊疗器具的保持的释放。
70.以下,参照图1~图10的同时对本实施方式1所涉及的机器人系统的一示例进行说明。
71.[机器人系统的结构]
[0072]
图1及图2为表示本实施方式1所涉及的机器人系统的概要结构的示意图。
[0073]
如图1所示,本实施方式1所涉及的机器人系统100具备机器人101、操作器102、第一显示装置103、以及控制装置110。机器人101被配置在第一空间201内,操作器102、第一显示装置103、以及控制装置110被配置在第二空间202内。
[0074]
第一空间201与第二空间202是彼此分离的空间。第一空间201与第二空间202由分隔部件210隔开。
[0075]
另外,也可以在第一空间201内配置用于拍摄患者的侧脸的拍摄装置(第一拍摄装置)。该拍摄装置既可设置在形成第一空间201的分隔部件210上,也可由与机器人101不同的机器人握持。
[0076]
此外,可在构成第一空间201的房间(诊疗室/检查室)中配置机器人101用于进行医疗检查行为的器具、实验装置、或者各种检查试剂等。作为器具,例如可列举出自动移液器、用于自动移液器的吸头、微型管(microtube)、离心管、离心沉淀管,作为实验装置,例如可列举出离心分离机、pcr装置等。
[0077]
另外,也可在构成第二空间202的房间(操作室)设置前室。此外,也可在前室设置以该前室成为负压且第二空间202(操作室的内部空间)成为正压的方式所构成的风扇过滤单元。风扇过滤单元可使用公知的风扇过滤单元。
[0078]
此外,分隔部件210可具备许可/禁止移向第一空间201的卷帘(门)204,也可具备许可/禁止移向第二空间202的卷帘(门)205。
[0079]
而且,分隔部件210也可被构成为,其一部分由玻璃板等的透明的部件构成,使得操作者(医疗从业人员)等从外部看到第一空间201内。
[0080]
操作器102被构成为对机器人101进行操作。作为操作器102,例如,可使用操纵杆、键盘、数字键盘、示教器(teach pendant)等的公知的操作器。
[0081]
此外,也可以在操作器102上配置将设置在后述的机器人101的手18上的力觉传感器检出的力觉信息、或者声音信息传递给操作者的机器。作为该机器,例如可列举出振动电机、扬声器、使构成握持部的筐体伸缩的机构等。
[0082]
另外,操作器102可被构成为,操作者(医疗从业人员)可携带并移送。此外,机器人101和操作器102可以是主从方式。
[0083]
此外,也可以在操作器102设置在紧急时(例如机器人101进行了异常动作的情况等)用于释放手18保持的医疗检查器具或者医疗诊疗器具的解除按钮102a。由操作者按下解除按钮102a的情况下,控制装置110也可使机器人101使手18进行动作离开患者。
[0084]
第一显示装置103被构成为,显示后述的第一拍摄装置20拍摄到的图像信息和/或影像信息。作为第一显示装置103,例如可由在桌子、地板等上放置使用的放置型显示器构成。此外,第一显示装置103也可由操作者戴在身上而使用的头戴式显示器或者眼镜构成。
[0085]
机器人101被构成为,能够基于从操作器102输入的患者的位置信息和/或医院内的位置信息(例如病房、诊疗室的位置信息)等,自行运动至患者的附近。
[0086]
此外,机器人101被构成为,使臂和/或手基于从操作器102所输入的臂和/或手的
操作信息进行动作。此时,机器人101也可被构成为,在控制装置110的控制下,根据针对患者所执行的医疗行为(例如诊疗和/或检查)的作业内容,以使该机器人101与患者的距离保持在预先设定的规定的第一距离的方式自动地进行移动。
[0087]
可采用如下方式,例如,在用听诊器执行对患者的正面进行听诊的作业(诊疗)之后,用听诊器执行对患者的背面进行听诊的作业(诊疗)的情况下,患者背面面对机器人101时,机器人101自动向后方移动,然后,以拉近与患者的距离的方式(以保持第一距离的方式)自动移动。
[0088]
由此,医疗从业人员能够通过远程操作对机器人101进行操作,从而能够对患者执行医疗行为。
[0089]
在此,参照图3的同时对机器人101的结构进行详细地说明。另外,以下对作为机器人101的水平多关节型的双腕机器人进行说明,但也可以采用水平多关节型或者垂直多关节型等的其他的机器人作为机器人101。
[0090]
图3为表示图1及图2所示的机器人系统中的机器人的概要结构的示意图。另外,在图3中,机器人的上下方向表示为图中的上下方向。
[0091]
如图3所示,机器人101具备台车12、第一臂13a、第二臂13b、第一手18a、第二手18b、被配置在台车12内的控制器14。
[0092]
另外,在不区分第一臂13a和第二臂13b的情况下,简称为臂13。同样地,在不区分第一手18a和第二手18b的情况下,简称为手18。
[0093]
此外,在本实施方式1中采用在台车12的内部配置有控制器14的方式,但并不局限于此,也可以是控制器14配置在台车12外部。关于控制器14,则在后文中进行叙述。
[0094]
台车12的下面配置有车轮19。车轮19与适当的齿轮以及驱动电机连接。由此,机器人101能够进行自行运动。
[0095]
此外,台车12的上面固定有基轴16以及第一拍摄装置20。第一拍摄装置20被构成为,对图像和/或影像进行拍摄,并将拍摄到的图像信息和/或影像信息输出至控制装置110。作为第一拍摄装置20,例如可以是摄像机,也可以是x射线拍摄装置。
[0096]
另外,第一拍摄装置20也可被构成为,将拍摄到的图像信息和/或影像信息不经由控制装置110而输出至第一显示装置103。此外,第一拍摄装置20也可被第一臂13a及第二臂13b以外的臂握持。
[0097]
在基轴16上,以绕穿过该基轴16的轴心的旋转轴线l1可转动的方式设置有第一臂13a及第二臂13b。具体地,第一臂13a和第二臂13b被设置为,在上下具有高低差。另外,第一臂13a及第二臂13b被构成为,可独立地动作,或者,可相互关联地动作。
[0098]
第一臂13a具有第一臂部15a、第一手腕部17a、第一手18a、以及第一装配部2a。同样地,第二臂13b具有第二臂部15b、第二手腕部17b、第二手18b、以及第二装配部2b。另外,由于第二臂13b以与第一臂13a同样的方式构成,因此省略其详细的说明。
[0099]
第一臂部15a在本实施方式1中由大致长方体状的第一连杆5a及第二连杆5b构成。第一连杆5a中,在基端部设置有旋转关节j1,前端部设置有旋转关节j2。此外,第二连杆5b中,在前端部设置有直动关节j3。
[0100]
而且,第一连杆5a的基端部经由旋转关节j1与基轴16连结,能够通过旋转关节j1而绕旋转轴线l1进行转动。此外,第二连杆5b的基端部经由旋转关节j2与第一连杆5a的前
端部连结,能够通过旋转关节j2绕旋转轴线l2进行转动。
[0101]
在第二连杆5b的前端部,经由直动关节j3,相对于第二连杆5b可升降移动地连结有第一手腕部17a。在第一手腕部17a的下端部设置有旋转关节j4,在旋转关节j4的下端部设置有第一装配部2a。
[0102]
第一装配部2a被构成为,可装卸第一手18a。具体地,例如,第一装配部2a具有被构成为其间隔可调整的一对棒部件,通过该一对棒部件夹入第一手18a,从而能够将第一手18a装配到第一手腕部17a。由此,第一手18a能够通过旋转关节j4绕旋转轴线l3进行转动。另外,棒部件可以在前端部分弯曲。
[0103]
只要第一手18a被构成为保持医疗检查器具或者医疗诊疗器具,则可以是任何形式。例如,可构成为如图1及图3所示那样由2个爪保持医疗检查器具或者医疗诊疗器具。作为医疗检查器具,例如,可以是无菌棉签,也可以是螺旋帽的管等各种管,也可以是注射器,也可以是导管,还可以是内窥镜检查器具。此外,作为医疗诊疗器具,例如,可以是听诊器,也可以是压舌板。
[0104]
此外,第一手18a被构成为,能够保持药物、膳食、检查用试剂等各种工件、释放工件。
[0105]
在此,参照图4,对第一手18a(手18)的其他的示例进行说明。
[0106]
图4为表示本实施方式1所涉及的机器人系统中的机器人的手的概要结构的示意图。另外,在图4中,机器人的上下方向及前后方向表示为图中的上下方向及前后方向。
[0107]
如图4所示,第一手18a具有主体31、中间部件32、以及保持部件33。主体31与中间部件32经由旋转关节j5而连结。此外,中间部件32与保持部件33经由旋转关节j6而连结。由此,保持部件33能够相对于主体31绕旋转轴线l4和/或旋转轴线l5进行转动。
[0108]
主体31上设有使保持部件33转动的致动器34。致动器34例如可以是通过控制器14而被伺服控制的伺服电机。此外,主体31上设有对伺服电机的旋转位置进行检测的旋转传感器(未图示)、和对控制伺服电机的旋转的电流进行检测的电流传感器(未图示)。旋转传感器例如可以是编码器。由旋转传感器检测到的位置信息、以及电流传感器检测到的电流信息也可经由控制器14而被输出到控制装置110。
[0109]
中间部件32的下端部设置有支承部件35。支承部件35上安装有照相机(第一拍摄装置)36。照相机36被构成为,对图像和/或影像进行拍摄,并将拍摄到的图像信息和/或影像信息输出至控制装置110。作为照相机36,例如可以是摄像机,也可以是x射线拍摄装置。
[0110]
此外,作为照相机36拍摄的对象,例如,在利用无菌棉签采集鼻咽拭子的情况下,可以是患者的鼻孔。此外,例如,用抽吸导管等采集来自唾液、下呼吸道的检验体(咳痰等)的情况下,可以是患者的口腔。
[0111]
另外,在本实施方式1中采用支承部件35及照相机36被配置在中间部件32的下端部的方式,但并不局限于此。支承部件35及照相机36也可被配置在中间部件32的上端部等。此外,支承部件35及照相机36也可被配置在保持部件33上。
[0112]
保持部件33上安装有用于保持/释放医疗检查器具或者医疗诊疗器具的卡盘机构37。作为卡盘机构37,例如,可由空气卡盘构成。卡盘机构37在此为保持用于采集pcr检查用的检验体的无菌棉签50。
[0113]
此外,保持部件33上配设有一对激光笔(laser pointer,激光指示器)38a、38b。激
光笔38a、38b被配置为,从它们分别照射出的激光39a、39b在第一手18a的前方交叉。另外,可在第一手18a上配置3个以上激光指示器。
[0114]
由此,当第一手18a靠近患者时,照到患者的激光39a与激光39b间的距离缩小。而且,当第一手18a靠近患者时,照射患者的激光成为1点。而且,当第一手18a进一步靠近患者时,照射患者的激光39a与激光39b间的距离增大。
[0115]
因此,操作者(医疗从业人员)通过由一对激光笔38a、38b所照射的激光39a、39b,能够容易地理解患者与医疗检查器具和/或医疗诊疗器具(无菌棉签50)的前端部的距离。
[0116]
此外,在第一臂13a及第二臂13b的各关节j1~j4上分别设置有作为使各关节连结的2个部件相对地旋转或者升降的致动器的一示例的驱动电机(未图示)。驱动电机例如可以是通过控制器14而被伺服控制的伺服电机。此外,在各关节j1~关节j4上分别设置有对驱动电机的旋转位置进行检测的旋转传感器(未图示)和对控制驱动电机的旋转的电流进行检测的电流传感器(未图示)。旋转传感器例如可以是编码器。由旋转传感器检测到的位置信息以及由电流传感器检测到的电流信息可以经由控制器14而被输出到控制装置110。
[0117]
控制器14具备运算处理器以及储存器(未图示)。运算处理器由微型处理器、cpu等构成,通过读取并执行储存器所储存的基本程序等的软件,来对机器人101的各种动作进行控制。
[0118]
储存器储存有基本程序、各种固定数据等信息。也可以在储存器中预先储存例如医院内的地图信息。
[0119]
储存器可构成为多个储存器(例如随机存取存储器及硬盘驱动器),而不必是单一的。在运算处理器由微型计算机构成的情况下,储存器的至少一部可构成为微型计算机的内部存储器,也可构成为独立的存储器。
[0120]
此外,控制器14可基于从控制装置110输入的各种指令信息来对机器人101的各种动作进行控制。
[0121]
如图1及图2所示,控制装置110具备运算处理器110a、储存器110b、以及输入器(操作器)110c。运算处理器110a由微型处理器、cpu等构成,通过读取并执行储存器110b中所储存的基本程序等的软件来控制机器人系统100的各种动作。
[0122]
储存器110b储存有基本程序、各种固定数据等的信息。储存器110b可构成为多个储存器(例如随机存取存储器及硬盘驱动器),而不必是单一的。在运算处理器110a由微型计算机构成的情况下,储存器110b的至少一部可构成为微型计算机的内部存储器,也可构成为独立的存储器。
[0123]
输入器110c是可将与机器人系统100的控制相关的各种参数、或者其他的数据等输入到运算处理器110a的设备,由键盘、触摸面板、按钮开关组等的公知的输入装置构成。在本实施方式1中,例如,可通过输入器110c输入患者的位置信息。此外,可通过操作器102来输入患者的位置信息。
[0124]
另外,控制装置110可由进行集中控制的单独的控制装置110构成,也可由相互协作地进行分散控制的多个控制装置110构成。此外,控制装置110可由微型计算机构成,也可由mpu、plc(programmable logic controller,可编辑逻辑控制器)、逻辑电路等构成。
[0125]
[机器人系统的动作以及作用效果]
[0126]
接下来,参照图1~图10的同时对本实施方式1所涉及的机器人系统100的动作及
作用效果进行详细地说明。另外,控制装置110的运算处理器110a通过读取储存器110b所容纳的程序来执行以下的动作。
[0127]
图5为表示本实施方式1所涉及的机器人系统的动作的一示例的流程图。图6为表示本实施方式1所涉及的机器人系统的机器人的动作的一示例的示意图。
[0128]
如图5所示,控制装置110通过操作者对输入器110c(和/或操作器102)进行操作,从而从输入器110c(和/或操作器102)来获取患者的位置信息(步骤s101)。
[0129]
接下来,控制装置110基于通过步骤s101获取的患者的位置信息,使机器人101从预先设定的待机场所自行运动到患者的附近(自动地移动)(步骤s102)。
[0130]
具体地,控制装置110将通过步骤s101获取的患者的位置信息输出至控制器14。控制器14基于所输入的患者的位置信息和储存器所储存的医院内的地图信息,使驱动电机驱动并使机器人101自行运动至患者的附近。
[0131]
另外,作为待机场所,也可以是远离第一空间201及第二空间202的场所(空间)。
[0132]
接下来,控制装置110获取第一拍摄装置20拍摄到的图像信息和/或影像信息并显示到第一显示装置103(步骤s103)。另外,控制装置110也可以在步骤s101或者步骤s102的处理之前执行步骤s103的处理。
[0133]
在此,参照图7~图10的同时对第一显示装置103所显示的图像信息和/或影像信息进行说明。
[0134]
图7为表示图1所示的第一显示装置上所显示的图像信息和/或影像信息的一示例的示意图。图8~图10为表示图1所示的第一显示装置上所显示的图像信息和/或影像信息的其他的示例的示意图。另外,在图8~图10中省略机器人101以及第一手18a的一部分的记载。
[0135]
如图7所示,可在第一显示装置103上显示由第一拍摄装置20拍摄到的影像信息(拍摄患者的正面的影像信息),作为第一影像信息103a。此外,也可在第一显示装置103上显示由用于拍摄患者的侧脸的拍摄装置(未图示)拍摄到的影像信息,作为第二影像信息103b。
[0136]
此外,如图8所示,也可在第一显示装置103上显示由第一拍摄装置20拍摄到的影像信息,作为第一影像信息103a。此外,也可在第一显示装置103上显示由设置在第一手18a上的照相机36拍摄到的影像信息,作为第三影像信息103c。
[0137]
此外,如图9所示,也可在第一显示装置103上显示由第一拍摄装置20拍摄到的影像信息,作为第一影像信息103a。此外,也可在第一显示装置103上显示由设置在第一手18a上的照相机36拍摄到的影像信息,作为第三影像信息103c。
[0138]
而且,也可在第一显示装置103上显示表示医疗检查器具和/或医疗诊疗器具的位置信息的虚拟模型,作为第四影像信息103d。具体地,作为第四影像信息103d,可显示无菌棉签50的虚拟模型,即虚拟无菌棉签50a、和患者的医疗对象部位的虚拟模型,即虚拟患者60。
[0139]
此时,控制装置110可基于患者的位置信息、由检测各驱动电机的旋转位置的旋转传感器检测到的位置信息和/或被输入到操作器102的操作信息,使第四影像信息103d内的虚拟无菌棉签50a进行移动。由此,操作者能够容易理解患者与医疗检查器具和/或医疗诊疗器具(无菌棉签50)的前端部的距离。
[0140]
而且,如图10所示,也可在第一显示装置103上显示由第一拍摄装置20拍摄到的影像信息,作为第一影像信息103a。此外,也可在第一显示装置103上显示由设置在第一手18a上的照相机36拍摄到的影像信息,作为第三影像信息103c。
[0141]
而且,也可在第一显示装置103上显示表示医疗检查器具和/或医疗诊疗器具的位置信息的虚拟模型,作为第四影像信息103d。具体地,作为第四影像信息103d,可显示无菌棉签50的虚拟模型即虚拟无菌棉签50a。
[0142]
此时,控制装置110也可基于患者的位置信息、由检测各驱动电机的旋转位置的旋转传感器检测到的位置信息和/或被输入到操作器102的操作信息,将侵入患者的体内的无菌棉签50的区域作为第一区域50b而显示在第四影像信息103d内。第一区域50b例如,如图10所示,可由阴影来表示,也可由不同于虚拟无菌棉签50a的颜色来表示。
[0143]
由此,操作者能够容易理解患者与医疗检查器具和/或医疗诊疗器具(无菌棉签50)的前端部的距离。
[0144]
接下来,如图5所示,控制装置110从操作器102获取臂13和/或手18的操作指令信息(步骤s104)。接着,控制装置110使臂13和/或手18基于通过步骤s104获取的操作指令信息进行动作(步骤s105)。
[0145]
由此,操作者通过远程操作来使机器人101相对于患者进行动作,从而能够执行医疗行为(例如诊疗和/或检查)。例如,操作者也可以对患者执行pcr检查用的检验体的采集作业。
[0146]
在此,参照图6的同时对机器人101的医疗行为作业进行说明。另外,在图6中,机器人101采用具有后述的第二显示装置24的方式。
[0147]
如图6所示,机器人101与患者之间配置有遮挡板221。遮挡板221可设置在桌子等的基台220上。此外,遮挡板221可由玻璃板等的透明的部件构成,并在大致中央部分设有开口部222。
[0148]
另外,开口部222的位置、大小可根据医疗行为的种类进行适当地设定。例如,在执行涉及内科、耳鼻科等的医疗行为的情况下,以使患者的口及鼻(医疗行为对象部分)位于开口部222的方式,适当设定开口部222的配置位置、大小。此外,在执行涉及眼科的医疗行为的情况下,以使患者的眼睛(医疗行为对象部分)位于开口部222的方式,适当设定开口部222的配置位置、大小。
[0149]
由此,能够抑制患者因咳嗽、打喷嚏而使飞沫附着在机器人101上。
[0150]
此外,在遮挡板221与患者之间设置有定位器230。定位器230具备主体231、被抵接部232、下颚放置台233。主体231可被构成为可由患者握持。此外,下颚放置台233可被构成为上下移动。
[0151]
定位器230被构成为,患者通过使额头抵接到被抵接部232来使下颚放置到下颚放置台233上,从而使患者的医疗行为对象部分位于预先设定的范围(开口部222)内。由此,患者的医疗行为对象部分的定位变得容易,能够降低操作者的操作的负担。
[0152]
另外,控制装置110在执行步骤s105的处理时,例如,可由手18保持的医疗检查器具或者医疗诊疗器具的前端部自动地使臂13和/或手18进行动作,以靠近患者。
[0153]
此外,控制装置110可使从操作器102所输入的臂13和/或手18的操作指令信息储存到储存器110b。此外,控制装置110可基于储存器110b所储存的操作指令信息,使臂13和/
或手18进行动作,从而对患者执行医疗行为(例如诊疗作业和/或检查作业)。
[0154]
此外,控制装置110可被构成为学习诊疗作业等。具体地,例如,控制装置110在使机器人101执行诊疗作业等时,操作者通过对操作器102进行操作来校正臂13和/或手18的动作的情况下,使被校正了的臂13和/或手18的操作指令信息储存在储存器110b中。
[0155]
接着,控制装置110基于被校正了的操作指令信息来使臂13和/或手18进行动作,从而对患者执行医疗行为(例如诊疗作业和/或检查作业)。然后,当再次由操作者校正臂13和/或手18的动作时,使被校正了的臂13和/或手18的操作指令信息储存到储存器110b制,从而学习诊疗作业等。
[0156]
接下来,控制装置110在操作者对操作器102(和/或输入器110c)进行操作而从操作器102(和/或输入器110c)输入医疗行为终止指令时,使机器人101自行运动到待机场所(步骤s106),从而终止本程序。
[0157]
另外,控制装置110可以如下方式进行控制,即,使机器人101自行运动到待机场所后,通过适当的手段使机器人101进行消毒之后,使机器人101处于待机状态。此外,也可由穿戴防护口罩及防护服的作业者来使机器人101进行消毒。
[0158]
以此方式构成的本实施方式1所涉及的机器人系统100中,被构成为,操作者(医疗从业人员)仅输入患者的位置信息,机器人101便自行运动到患者的附近。由此,操作者能够专注于医疗行为,进而能够降低操作者的操作的负担。
[0159]
此外,本实施方式1所涉及的机器人系统100被构成为,操作者在与患者隔开的第二空间202对机器人101进行操作。
[0160]
由此,能够抑制与疑似有病毒等的感染的患者的接触。因此,能够充分地抑制对操作者的病毒等的感染。
[0161]
此外,通过机器人101移动到处于各病房等的患者附近,从而无需操作者在医院内进行移动。因此,能够充分地抑制对操作者的感染。
[0162]
而且,通过机器人101进行移动,从而能够降低被病毒等感染的患者在医院内的移动次数和/或移动距离。由此,能够降低病毒等的扩散。
[0163]
此外,本实施方式1所涉及的机器人系统100中,一对激光笔38a、38b以从它们分别照射的激光39a、39b交叉的方式被配置在第一手18a(手18)上。
[0164]
由此,当第一手18a靠近患者时,照到患者的激光39a与激光39b间的距离缩小。而且,当第一手18a靠近患者时,照到患者的激光成为1点。而且,当第一手18a进一步靠近患者时,照到患者的激光39a与激光39b间的距离增大。
[0165]
因此,操作者(医疗从业人员)通过由一对激光笔38a、38b所照射的激光39a、39b,能够容易地理解患者与医疗检查器具和/或医疗诊疗器具(无菌棉签50)的前端部的距离。
[0166]
而且,本实施方式1所涉及的机器人系统100中,表示医疗检查器具和/或医疗诊疗器具的位置信息的虚拟模型作为第四影像信息103d而被显示到第一显示装置103上。由此,操作者能够容易理解患者与医疗检查器具和/或医疗诊疗器具(无菌棉签50)的前端部的距离。
[0167]
此时,控制装置110通过在第一显示装置103上显示患者的医疗对象部位的虚拟模型即虚拟患者60,从而能够更容易理解患者与医疗检查器具和/或医疗诊疗器具(无菌棉签50)的前端部的距离。
[0168]
[变形例1]
[0169]
接下来,参照图11的同时对本实施方式1所涉及的机器人系统100的变形例进行说明。
[0170]
图11为表示本实施方式1中的变形例1的机器人系统的概要结构的示意图。
[0171]
如图11所示,本变形例1的机器人系统100与实施方式1所涉及的机器人系统100的基本结构相同,但不同点在于机器人101由垂直多关节型机器人构成。
[0172]
以此方式构成的本变形例1的机器人系统100,也会实现与实施方式1所涉及的机器人系统100同样的作用效果。
[0173]
(实施方式2)
[0174]
本实施方式2所涉及的机器人系统为,在实施方式1(包括变形例)所涉及的机器人系统中,机器人还具备第一声音输入装置和第一声音输出装置,第二空间中还配置有第二声音输入装置和第二声音输出装置,控制装置被构成为,将被输入到第一声音输入装置中的声音信息输出至第二声音输出装置,将被输入到第二声音输入装置的声音信息输出至第一声音输出装置。
[0175]
本实施方式2所涉及的机器人系统的运转方法为,在实施方式1(包括变形例)所涉及的机器人系统的运转方法中,机器人还具备第一声音输入装置和第一声音输出装置,第二空间中还配置有第二声音输入装置和第二声音输出装置,控制装置被构成为,将被输入到第一声音输入装置中的声音信息输出至第二声音输出装置,将被输入到第二声音输入装置中的声音信息输出至第一声音输出装置。
[0176]
以下,参照图12的同时对本实施方式2所涉及的机器人系统的一示例进行说明。
[0177]
[机器人系统的结构]
[0178]
图12为表示本实施方式2所涉及的机器人系统的概要结构的示意图。
[0179]
如图12所示,本实施方式2所涉及的机器人系统100与实施方式1所涉及的机器人系统100的基本结构相同,但不同点在于,机器人101具有第一声音输入装置21及第一声音输出装置22这一点和第二空间202中配置有第二声音输入装置104及第二声音输出装置105。
[0180]
第一声音输入装置21及第二声音输入装置104例如可由麦克风构成。此外,第一声音输出装置22及第二声音输出装置105可由扬声器构成。
[0181]
另外,第二声音输入装置104及第二声音输出装置105可由带麦克风的耳机(耳麦)构成。此外,在第一显示装置103由头戴式显示器构成的情况下,第二声音输入装置104及第二声音输出装置105可由被安装到该头戴式显示器上的麦克风及耳机构成。
[0182]
以此方式构成的本实施方式2所涉及的机器人系统100,也会实现与实施方式1所涉及的机器人系统100同样的作用效果。
[0183]
此外,在本实施方式2所涉及的机器人系统100中,由于机器人101上设置有第一声音输入装置21及第一声音输出装置22,第二空间202中配置有第二声音输入装置104及第二声音输出装置105,因此在患者与操作者之间能够进行沟通。
[0184]
由此,例如在操作者为医疗从业人员的情况下,或者在操作者的旁边有医疗从业人员的情况下,能够对患者执行问诊、听诊、检查结果的传达、治疗方针的传达等的医疗行为。
[0185]
(实施方式3)
[0186]
本实施方式3所涉及的机器人系统为,在实施方式1(包括变形例)或者实施方式2所涉及的机器人系统中,机器人还具备收纳药物、膳食、检查用试剂、检验体、医疗检查器具、以及医疗诊疗器具之中至少1个运送品的收纳装置。
[0187]
本实施方式3所涉及的机器人系统的运转方法为,在实施方式1(包括变形例)或者实施方式2所涉及的机器人系统的运转方法中,机器人还具备收纳药物、膳食、检查用试剂、检验体、医疗检查器具、以及医疗诊疗器具之中至少1个运送品的收纳装置。
[0188]
以下,参照图13的同时对本实施方式3所涉及的机器人系统的一示例进行说明。
[0189]
[机器人系统的结构]
[0190]
图13为表示本实施方式3所涉及的机器人系统的概要结构的示意图。
[0191]
如图13所示,本实施方式3所涉及的机器人系统100与实施方式1所涉及的机器人系统100的基本结构相同,但不同点在于,机器人101还具备收纳药物、膳食、检查用试剂、检验体、医疗检查器具、以及医疗诊疗器具之中至少1个运送品的收纳装置23。
[0192]
作为收纳装置23,例如可使用带盖的箱、托盘等各种收纳用品。此外,收纳装置23可由金属(例如不锈钢)构成,以应对高压灭菌、干热灭菌等灭菌处理。而且,收纳装置23可被构成为能够将内部空间维持在规定温度(例如0℃、-20℃、-80℃),以便能够运送检验体。
[0193]
此外,也可在收纳装置23内收纳例如自动移液器、用于自动移液器的吸头、微型管、离心沉淀管、离心分离机、pcr装置等各种器具和/或实验装置。
[0194]
以此方式构成的本实施方式3所涉及的机器人系统100,也会实现与实施方式1所涉及的机器人系统100同样的作用效果。
[0195]
此外,本实施方式3所涉及的机器人系统100中,机器人101还具备收纳药物、膳食、检查用试剂、检验体、医疗检查器具、以及医疗诊疗器具之中至少1个运送品的收纳装置23。由此,能够降低护士等医疗行为辅助者的作业。此外,能够降低医疗行为辅助者与病毒等的传染病患者接触的机会,从而能够充分抑制医疗行为辅助者的病毒等的感染。
[0196]
(实施方式4)
[0197]
本实施方式4所涉及的机器人系统为,在实施方式1(包括变形例)~3中任一实施方式所涉及的机器人系统中,还具备与第一空间及第二空间隔开的第三空间,机器人在第三空间被消毒。
[0198]
此外,本实施方式4所涉及的机器人系统中,机器人可被构成为,对该机器人本身进行消毒。
[0199]
而且,本实施方式4所涉及的机器人系统中,控制装置可被构成为还执行(c),即在(b)后,使机器人自行运动到第三空间来使该机器人被消毒。
[0200]
本实施方式4所涉及的机器人系统的运转方法为,在实施方式1(包括变形例)~3中任一实施方式所涉及的机器人系统的运转方法中,还具备与第一空间及第二空间隔开的第三空间,机器人在第三空间被消毒。
[0201]
此外,本实施方式4所涉及的机器人系统的运转方法中,机器人被构成为可对该机器人本身进行消毒。
[0202]
而且,本实施方式4所涉及的机器人系统的运转方法中,还具备(c),即在(b)后,机器人自行运动到第三空间并使该机器人被消毒。
[0203]
以下,参照图14及图15的同时对本实施方式4所涉及的机器人系统的一示例进行说明。
[0204]
[机器人系统的结构]
[0205]
图14为表示本实施方式4所涉及的机器人系统的概要结构的示意图。
[0206]
如图14所示,本实施方式4所涉及的机器人系统100与实施方式1所涉及的机器人系统100的基本结构相同,但不同点在于还具备与第一空间201及第二空间202隔开的第三空间203。
[0207]
第一空间201与第二空间202与第三空间203是彼此分离的空间。第一空间201与第二空间202与第三空间203分别由分隔部件210隔开。
[0208]
另外,也可在构成第三空间203的房间(灭菌室)设置前室。此外,也可在前室设置以该前室成为负压且第二空间202(灭菌室的内部空间)成为正压的方式所构成的风扇过滤单元。风扇过滤单元可使用公知的风扇过滤单元。
[0209]
分隔部件210可具备许可/禁止移向第三空间203的卷帘(门)206。
[0210]
机器人101可被构成为,对该机器人101本身进行消毒。具体地,例如,可用手18保持以喷雾的方式喷出具有杀菌、抗病毒作用的乙醇溶液等的溶液的喷雾器,并将上述溶液喷向机器人101,从而对该机器人101本身进行消毒。
[0211]
此外,还可用手18来保持照射紫外线的照射器,并将紫外线照向机器人101,从而对该机器人101本身进行消毒。
[0212]
而且,可在第三空间203配置防护罩(手术单)。机器人101可被构成为,通过穿脱防护罩来维持灭菌、抗病毒状态。
[0213]
具体地,机器人101在第三空间203中套上防护罩,之后,移向第一空间201来执行医疗行为。医疗行为终止后,移动到未配置防护罩的另一第三空间203,取下防护罩。然后,移动至配置有防护罩的第三空间203并套上防护罩。
[0214]
[机器人系统的动作及作用效果]
[0215]
接下来,参照图14及图15的同时对本实施方式4所涉及的机器人系统100的动作及作用效果进行详细地说明。另外,控制装置110的运算处理器110a通过读取储存器110b所容纳的程序来执行以下的动作。
[0216]
图15为表示本实施方式4所涉及的机器人系统的动作的一示例的流程图。
[0217]
如图15所示,本实施方式4所涉及的机器人系统100的动作与实施方式1所涉及的机器人系统100的基本的动作相同,但不同点在于控制装置110执行步骤s106a的处理而取代步骤s106的处理这一点、和在步骤s106a的处理之后执行步骤s107的处理这一点。
[0218]
具体地,当从操作器102(和/或输入器110c)输入医疗行为终止指令信息时,控制装置110使机器人101自行运动至第三空间203(步骤s106a)。
[0219]
接下来,控制装置110在第三空间203使机器人101消毒(步骤s107),从而终止本程序。
[0220]
以此方式构成的本实施方式4所涉及的机器人系统100,也会实现与实施方式1所涉及的机器人系统100同样的作用效果。
[0221]
此外,本实施方式4所涉及的机器人系统100中,机器人101被构成为,对该机器人101本身进行消毒。由此,无需由穿戴了防护口罩及防护服的作业者来使机器人101进行消
毒。因此,能够提供便于使用的机器人系统100。
[0222]
[变形例1]
[0223]
接下来,对本实施方式4所涉及的机器人系统100的变形例进行说明。
[0224]
本实施方式4中的变形例1的机器人系统为,在第三空间配置有被构成为对机器人进行消毒的消毒装置。
[0225]
本实施方式4中的变形例1的机器人系统的运转方法为,在第三空间配置有被构成为对机器人进行消毒的消毒装置。
[0226]
以下,参照图16的同时对本实施方式4中的变形例1的机器人系统的一示例进行说明。
[0227]
[机器人系统的结构]
[0228]
图16为表示本实施方式4中的变形例1的机器人系统的概要结构的示意图。
[0229]
如图16所示,本变形例1的机器人系统100与实施方式4所涉及的机器人系统100的基本结构相同,但不同点在于在构成第三空间203的灭菌室配置消毒装置300。
[0230]
作为消毒装置300,可以是以喷雾的方式喷出具有杀菌、抗病毒作用的乙醇溶液等溶液的喷雾器。此外,作为消毒装置300,可以是照射紫外线的照射器。而且,还可在灭菌室配置不同于机器人101的机器人,该机器人对喷雾器或照射器进行保持来执行机器人101的消毒作业。
[0231]
以此方式构成的本变形例1的机器人系统100,也会实现与实施方式4所涉及的机器人系统100同样的作用效果。
[0232]
(实施方式5)
[0233]
本实施方式5所涉及的机器人系统为,在实施方式1~4(包括变形例)中任一实施方式所涉及的机器人系统中,机器人还具备第二显示装置,第二空间中还配置有第二拍摄装置,控制装置被构成为,在(b)中,使由第二拍摄装置拍摄到的图像信息和/或影像信息显示到第二显示装置。
[0234]
本实施方式5所涉及的机器人系统的运转方法为,在实施方式1~4(包括变形例)中任一实施方式所涉及的机器人系统的运转方法中,机器人还具备第二显示装置,第二空间中还配置有第二拍摄装置,控制装置被构成为,在(b)中,使由第二拍摄装置拍摄到的图像信息和/或影像信息显示到第二显示装置。
[0235]
以下,参照图17及图18,对本实施方式5所涉及的机器人系统的一示例进行说明。
[0236]
[机器人系统的结构]
[0237]
图17为表示本实施方式5所涉及的机器人系统的概要结构的示意图。
[0238]
如图17所示,本实施方式5所涉及的机器人系统100与实施方式1所涉及的机器人系统100的基本结构相同,但不同点在于机器人101还具备第二显示装置24这一点、和第二空间202中还配置有第二拍摄装置106这一点。
[0239]
第二显示装置24被构成为,显示第二拍摄装置106拍摄到的图像信息和/或影像信息。作为第二显示装置24,例如可由放置型的显示器构成。
[0240]
第二拍摄装置106被构成为,对图像和/或影像进行拍摄,并将拍摄到的图像信息和/或影像信息经由控制装置110及控制器14输出到第二显示装置24上。作为第二拍摄装置106,例如可以是摄像机。
[0241]
[机器人系统的动作及作用效果]
[0242]
接下来,参照图17及图18的同时对本实施方式5所涉及的机器人系统100的动作及作用效果进行详细地说明。另外,控制装置110的运算处理器110a通过读取储存器110b所容纳的程序来执行以下的动作。
[0243]
图18为表示本实施方式5所涉及的机器人系统的动作的一示例的流程图。
[0244]
如图18所示,本实施方式5所涉及的机器人系统100的动作与实施方式1所涉及的机器人系统100的基本动作相同,但不同点在于控制装置110执行步骤s103a的处理而取代步骤s103的处理。
[0245]
具体地,控制装置110从待机场所自行运动至患者的附近(步骤s102)后,执行以下的处理。
[0246]
控制装置110获取由第一拍摄装置20拍摄到的图像信息和/或影像信息并显示到第一显示装置103,并获取由第二拍摄装置106拍摄到的图像信息和/或影像信息并显示到第二显示装置24(步骤s103a)。另外,控制装置110可在步骤s101或者步骤s102的处理之前执行步骤s103a的处理。
[0247]
以此方式构成的本实施方式5所涉及的机器人系统100,也会实现与实施方式1所涉及的机器人系统100同样的作用效果。
[0248]
此外,本实施方式5所涉及的机器人系统100中,机器人101还具备第二显示装置24,第二空间202中还配置有第二拍摄装置106。
[0249]
由此,在患者与操作者(医疗从业人员)之间能够进行沟通。
[0250]
(实施方式6)
[0251]
本实施方式6所涉及的机器人系统具备:具备臂的机器人,该臂具有对医疗检查器具和/或医疗诊疗器具进行保持的手;操作器,其被构成为对机器人进行操作;控制装置,配置有机器人的第一空间与配置有操作器的第二空间被隔开,在手上配置有第一拍摄装置,控制装置被构成为执行(α),即,基于从操作器所输入的臂和/或手的操作指令信息,使臂和/或手进行动作。
[0252]
此外,在本实施方式6所涉及的机器人系统中,也可以采用如下方式,即,机器人系统还具备第一拍摄装置、和被构成为显示由第一拍摄装置拍摄到的图像信息和/或影像信息的第一显示装置,控制装置被构成为,在使由第一拍摄装置拍摄到的图像信息和/或影像信息显示到第一显示装置的状态下执行(α)。
[0253]
此外,本实施方式6所涉及的机器人系统中,机器人和操作器可以主从方式构成。
[0254]
此外,本实施方式6所涉及的机器人系统中,第一拍摄装置既可配置在机器人上,也可配置在机器人的手上。
[0255]
此外,本实施方式6所涉及的机器人系统中,也可采用如下方式,即,一对激光指示器以从该激光指示器照射的光交叉的方式被配置在手上。
[0256]
此外,本实施方式6所涉及的机器人系统中,第一显示装置可被构成为,显示表示医疗检查器具和/或医疗诊疗器具的位置信息的虚拟模型。
[0257]
此外,本实施方式6所涉及的机器人系统中,第一显示装置可被构成为,显示患者的医疗行为对象部位的虚拟模型。
[0258]
而且,本实施方式6所涉及的机器人系统中,也可在操作器上配置操作开关,该操
作开关被构成为指示医疗检查器具和/或医疗诊疗器具的保持的释放。
[0259]
本实施方式6所涉及的机器人系统的运转方法为,机器人系统具备:具备臂的机器人,该臂具有对医疗检查器具和/或医疗诊疗器具进行保持的手;操作器,其被构成为对机器人进行操作,配置有机器人的第一空间与配置有操作器的第二空间被隔开,在手上配置有第一拍摄装置,该机器人系统的运转方法具备(α),即,臂和/或手基于从操作器输入的臂和/或手的操作指令信息进行动作。
[0260]
此外,本实施方式6所涉及的机器人系统的运转方法中,也可采用如下方式,即,机器人系统被构成为还具备第一拍摄装置、和显示由第一拍摄装置拍摄到的图像信息和/或影像信息的第一显示装置,在使由第一拍摄装置拍摄到的图像信息和/或影像信息显示到第一显示装置的状态下执行(α)。
[0261]
此外,本实施方式6所涉及的机器人系统的运转方法中,机器人与操作器可以主从方式构成。
[0262]
此外,本实施方式6所涉及的机器人系统的运转方法中,第一拍摄装置既可配置在机器人上,也可配置在手上。
[0263]
此外,本实施方式6所涉及的机器人系统的运转方法中,也可采用如下方式,即,一对激光指示器以从该激光指示器照射的光交叉的方式被配置在手上。
[0264]
此外,本实施方式6所涉及的机器人系统的运转方法中,第一显示装置可被构成为,显示表示医疗检查器具和/或医疗诊疗器具的位置信息的虚拟模型。
[0265]
此外,本实施方式6所涉及的机器人系统的运转方法中,第一显示装置可被构成为,显示患者的医疗行为对象部位的虚拟模型。
[0266]
而且,本实施方式6所涉及的机器人系统的运转方法中,也可在操作器上配置操作开关,该操作开关被构成为,指示医疗检查器具和/或医疗诊疗器具的保持的释放。
[0267]
以下,参照图19~图22的同时对本实施方式6所涉及的机器人系统的一示例进行说明。
[0268]
[机器人系统的结构]
[0269]
图19及图20为表示本实施方式6所涉及的机器人系统的概要结构的示意图。
[0270]
如图19及图20所示,本实施方式6所涉及的机器人系统100与实施方式1所涉及的机器人系统100的基本结构相同,但不同点在于机器人101被设置在第一空间201(机器人101为放置型)。此外,机器人101的第一手18a的结构不同。
[0271]
在此,参照图21的同时对机器人101的第一手18a的结构进行说明。
[0272]
图21为表示图19所示的机器人的手的概要结构的示意图。另外,图21中,机器人的上下方向及前后方向表示为图中的上下方向及前后方向。
[0273]
如图21所示,第一手18a具有主体31、中间部件32、以及保持部件33。主体31与中间部件32经由旋转关节j5而连结。此外,中间部件32与保持部件33经由旋转关节j6而连结。由此,保持部件33可相对于主体31绕旋转轴线l4和/或旋转轴线l5进行转动。
[0274]
主体31上设有使保持部件33转动的致动器34。致动器34例如可以是通过控制器14而被伺服控制的伺服电机。此外,主体31上设有对伺服电机的旋转位置进行检测的旋转传感器(未图示)、和对控制伺服电机的旋转的电流进行检测的电流传感器(未图示)。旋转传感器例如可以是编码器。由旋转传感器检测到的位置信息、以及由电流传感器检测到的电
流信息也可经由控制器14而被输出到控制装置110。
[0275]
中间部件32的下端部设有支承部件35。支承部件35上安装有照相机(第一拍摄装置)36。照相机36被构成为,对图像和/或影像进行拍摄,并将拍摄到的图像信息和/或影像信息输出至控制装置110。作为照相机36,例如可以是摄像机,也可以是x射线拍摄装置。
[0276]
此外,作为照相机36拍摄的对象,例如,在利用无菌棉签采集鼻咽拭子的情况下,可以是患者的鼻孔。此外,例如,用抽吸导管等采集来自唾液、下呼吸道的检验体(咳痰等)的情况下,可以是患者的口腔。
[0277]
另外,在本实施方式1中采用支承部件35及照相机36被配置在中间部件32的下端部的方式,但并不局限于此。支承部件35及照相机36也可被配置在中间部件32的上端部等。此外,支承部件35及照相机36也可被配置在保持部件33上。
[0278]
保持部件33上安装有用于保持/释放医疗检查器具或者医疗诊疗器具的卡盘机构37。作为卡盘机构37,例如可由空气卡盘构成。卡盘机构37在此为保持用于采集pcr检查用的检验体的无菌棉签50。
[0279]
此外,保持部件33上配设有一对激光笔(激光指示器)38a、38b。激光笔38a、38b被配置为,从它们分别照射出的激光39a、39b在第一手18a的前方交叉。另外,可在第一手18a上配置3个以上激光指示器。
[0280]
由此,当第一手18a靠近患者时,照到患者的激光39a与激光39b间的距离缩小。而且,当第一手18a靠近患者时,照到患者的激光成为1点。而且,当第一手18a进一步靠近患者时,照到患者的激光39a与激光39b间的距离增大。
[0281]
因此,操作者(医疗从业人员)通过由一对激光笔38a、38b所照射的激光39a、39b,能够容易地理解患者与医疗检查器具和/或医疗诊疗器具(无菌棉签50)的前端部的距离。
[0282]
[机器人系统的动作及作用效果]
[0283]
接下来,参照图19~图22的同时对本实施方式6所涉及的机器人系统100的动作及作用效果进行详细地说明。另外,控制装置110的运算处理器110a通过读取储存器110b所容纳的程序来执行以下的动作。
[0284]
图22为表示本实施方式6所涉及的机器人系统的动作的一示例的流程图。
[0285]
如图22所示,控制装置110获取由第一拍摄装置20拍摄到的图像信息和/或影像信息并显示到第一显示装置103(步骤s201)。另外,第一显示装置103上所显示的图像信息和/或影像信息也可以是图6~图10所示的示例。
[0286]
接下来,控制装置110从操作器102获取臂13和/或手18的操作指令信息(步骤s202)。接着,控制装置110基于通过步骤s104获取的操作指令信息,使臂13和/或手18进行动作(步骤s203)。
[0287]
由此,操作者通过远程操作来使机器人101相对于患者进行动作,从而能够执行医疗行为(例如、诊疗和/或检查)(参照图6)。例如,操作者可执行pcr检查用的检验体的采集作业。
[0288]
另外,控制装置110可使从操作器102输入的臂13和/或手18的操作指令信息储存到储存器110b。此外,控制装置110可基于储存器110b所储存的操作指令信息,使臂13和/或手18进行动作,从而对患者执行医疗行为(例如诊疗作业和/或检查作业)。
[0289]
此外,控制装置110可被构成为学习诊疗作业等。具体地,例如,控制装置110在使
机器人101执行诊疗作业等时操作者通过对操作器102进行操作来校正臂13和/或手18的动作的情况下,使被校正了的臂13和/或手18的操作指令信息储存到储存器110b。
[0290]
接着,控制装置110基于被校正了的操作指令信息来使臂13和/或手18进行动作,从而对患者执行医疗行为(例如诊疗作业和/或检查作业)。然后,当再次由操作者校正臂13和/或手18的动作时,使被校正了的臂13和/或手18的操作指令信息储存到储存器110b,从而学习诊疗作业等。
[0291]
接下来,控制装置110在操作者对操作器102(和/或输入器110c)进行操作而从操作器102(和/或输入器110c)输入医疗行为终止指令信息时(步骤s204中为是),终止本程序。
[0292]
另外,控制装置110可以如下方式进行控制,在本程序终止后,通过适当的手段使机器人101进行消毒之后,使机器人101处于待机状态。此外,也可由穿戴防护口罩及防护服的作业者来使机器人101消毒。
[0293]
以此方式构成的本实施方式6所涉及的机器人系统100中,被构成为,操作者在与患者隔开的第二空间202对机器人101进行操作。
[0294]
由此,能够抑制与疑似有病毒等的感染的患者的接触。因此,能够充分抑制对操作者的病毒等的感染。
[0295]
此外,本实施方式6所涉及的机器人系统100中,一对激光笔38a、38b以从它们分别照射的激光39a、39b交叉的方式被配置在第一手18a(手18)上。
[0296]
由此,当第一手18a靠近患者时,照到患者的激光39a与激光39b间的距离缩小。而且,当第一手18a靠近患者时,照到患者的激光成为1点。而且,当第一手18a进一步靠近患者时,照到患者的激光39a与激光39b间的距离增大。
[0297]
因此,操作者(医疗从业人员)通过由一对激光笔38a、38b所照射的激光39a、39b,能够容易理解患者与医疗检查器具和/或医疗诊疗器具(无菌棉签50)的前端部的距离。
[0298]
而且,本实施方式6所涉及的机器人系统100中,表示医疗检查器具和/或医疗诊疗器具的位置信息的虚拟模型作为第四影像信息103d而被显示到第一显示装置103。由此,操作者能够容易理解患者与医疗检查器具和/或医疗诊疗器具(无菌棉签50)的前端部的距离。
[0299]
此时,控制装置110通过在第一显示装置103上显示患者的医疗对象部位的虚拟模型即虚拟患者60,从而能够更容易地理解患者与医疗检查器具和/或医疗诊疗器具(无菌棉签50)的前端部的距离。
[0300]
[变形例1]
[0301]
接下来,参照图23的同时对本实施方式6所涉及的机器人系统的变形例进行说明。
[0302]
图23为表示本实施方式6中的变形例1的机器人系统的概要结构的示意图。
[0303]
如图23所示,本变形例1的机器人系统100与实施方式6所涉及的机器人系统100的基本结构相同,但不同点在于机器人101由垂直多关节型机器人构成。
[0304]
以此方式构成的本变形例1的机器人系统100,也会实现与实施方式6所涉及的机器人系统100同样的作用效果。
[0305]
(实施方式7)
[0306]
本实施方式7所涉及的机器人系统为,在实施方式6(包括变形例)所涉及的机器人
系统中,机器人还具备第一声音输入装置和第一声音输出装置,第二空间中还配置有第二声音输入装置和第二声音输出装置,控制装置被构成为,将被输入到第一声音输入装置中的声音信息输出至第二声音输出装置,将被输入到第二声音输入装置中的声音信息输出至第一声音输出装置。
[0307]
以下,参照图24的同时对本实施方式7所涉及的机器人系统的一示例进行说明。
[0308]
[机器人系统的结构]
[0309]
图24为表示本实施方式7所涉及的机器人系统的概要结构的示意图。
[0310]
如图24所示,本实施方式7所涉及的机器人系统100与实施方式6所涉及的机器人系统100的基本结构相同,但不同点在于机器人101具有第一声音输入装置21及第一声音输出装置22这一点、和在第二空间202中配置有第二声音输入装置104及第二声音输出装置105这一点。
[0311]
第一声音输入装置21及第二声音输入装置104例如可由麦克风构成。此外,第一声音输出装置22及第二声音输出装置105可由扬声器构成。
[0312]
另外,第二声音输入装置104及第二声音输出装置105可由带麦克风的耳机(耳麦)构成。此外,在第一显示装置103由头戴式显示器构成的情况下,第二声音输入装置104及第二声音输出装置105可由被安装到该头戴式显示器上的麦克风及耳机构成。
[0313]
以此方式构成的本实施方式7所涉及的机器人系统100,也会实现与实施方式6所涉及的机器人系统100同样的作用效果。
[0314]
此外,本实施方式7所涉及的机器人系统100中,由于机器人101上设有第一声音输入装置21及第一声音输出装置22,第二空间202中配置有第二声音输入装置104及第二声音输出装置105,因此在患者与操作者之间能够进行沟通。
[0315]
由此,例如在操作者为医疗从业人员的情况下,或者操作者的旁边有医疗从业人员的情况下,能够对患者执行问诊、听诊、检查结果的传达、治疗方针的传达等的医疗行为。
[0316]
(实施方式8)
[0317]
本实施方式8所涉及的机器人系统为,在实施方式6(包括变形例)或7中任一实施方式所涉及的机器人系统中,机器人还具备第二显示装置,第二空间中还配置有第二拍摄装置,控制装置被构成为,在(α)中,使第二拍摄装置拍摄到的图像信息和/或影像信息显示到第二显示装置。
[0318]
本实施方式8所涉及的机器人系统的运转方法为,在实施方式6(包括变形例)或7中任一实施方式所涉及的机器人系统的运转方法中,机器人还具备第二显示装置,第二空间中还配置有第二拍摄装置,在(α)中,第二显示装置被构成为,显示第二拍摄装置拍摄到的图像信息和/或影像信息。
[0319]
以下,参照图25及图26的同时对本实施方式8所涉及的机器人系统的一示例进行说明。
[0320]
[机器人系统的结构]
[0321]
图25为表示本实施方式8所涉及的机器人系统的概要结构的示意图。
[0322]
如图25所示,本实施方式8所涉及的机器人系统100与实施方式6所涉及的机器人系统100的基本结构相同,但不同点在于机器人101还具备第二显示装置24这一点、和在第二空间202中还配置有第二拍摄装置106这一点。
[0323]
第二显示装置24被构成为显示第二拍摄装置106拍摄到的图像信息和/或影像信息。作为第二显示装置24,例如可由放置型的显示器构成。
[0324]
第二拍摄装置106被构成为,拍摄图像和/或影像进行,并将拍摄到的图像信息和/或影像信息经由控制装置110及控制器14输出至第二显示装置24。作为第二拍摄装置106,例如可以是摄像机。
[0325]
[机器人系统的动作及作用效果]
[0326]
接下来,参照图25及图26的同时对本实施方式8所涉及的机器人系统100的动作及作用效果进行详细地说明。另外,控制装置110的运算处理器110a通过读取储存器110b所容纳的程序来执行以下的动作。
[0327]
图26为表示本实施方式8所涉及的机器人系统的动作的一示例的流程图。
[0328]
如图26所示,本实施方式8所涉及的机器人系统100的动作与实施方式6所涉及的机器人系统100的基本的动作相同,但不同点在于控制装置110取代步骤s201的处理而执行步骤s201a的处理。
[0329]
具体地,控制装置110获取由第一拍摄装置20拍摄到的图像信息和/或影像信息并显示到第一显示装置103上,获取由第二拍摄装置106拍摄到的图像信息和/或影像信息并显示到第二显示装置24上(步骤s201a)。
[0330]
以此方式构成的本实施方式8所涉及的机器人系统100,也会实现与实施方式6所涉及的机器人系统100同样的作用效果。
[0331]
此外,本实施方式8所涉及的机器人系统100中,机器人101还具备第二显示装置24,在第二空间202中还配置有第二拍摄装置106。
[0332]
由此,患者与操作者(医疗从业人员)之间能够进行沟通。
[0333]
根据上述说明,作为本领域技术人员来说,本发明的许多改良或者其他的实施方式是显而易见的。因此,上述说明仅应被解释为示例,并且是以教导本领域技术人员执行本发明的最佳方式为目的而提供的。在不脱离本发明的情况下,其构造和/或功能的细节节可以实质上改变。
[0334]
产业上的可利用性
[0335]
根据本发明的机器人系统及其运转方法,能够充分降低在医院内的医疗从业人员等的感染,因此在机器人的领域中是有用的。
[0336]
标号说明
[0337]
2a 第一装配部;
[0338]
2b 第二装配部;
[0339]
5a 第一连杆;
[0340]
5b 第二连杆;
[0341]
12 台车;
[0342]
13 臂;
[0343]
13a 第一臂;
[0344]
13b 第二臂;
[0345]
14 控制器;
[0346]
15a 第一臂部;
[0347]
15b 第二臂部;
[0348]
16 基轴;
[0349]
17a 第一手腕部;
[0350]
17b 第二手腕部;
[0351]
18 手;
[0352]
18a 第一手;
[0353]
18b 第二手;
[0354]
19 车轮;
[0355]
20 第一拍摄装置;
[0356]
21 第一声音输入装置;
[0357]
22 第一声音输出装置;
[0358]
23 收纳装置;
[0359]
24 第二显示装置;
[0360]
31 主体;
[0361]
32 中间部件;
[0362]
33 保持部件;
[0363]
34 致动器;
[0364]
35 支承部件;
[0365]
36 照相机;
[0366]
37 卡盘机构;
[0367]
38a 激光笔;
[0368]
38b 激光笔;
[0369]
39b 激光;
[0370]
39a 激光;
[0371]
50 无菌棉签;
[0372]
50a 虚拟无菌棉签;
[0373]
50b 第一区域;
[0374]
60 虚拟患者;
[0375]
100 机器人系统;
[0376]
101 机器人;
[0377]
102 操作器;
[0378]
102a 解除按钮;
[0379]
103 第一显示装置;
[0380]
103a 第一影像信息;
[0381]
103b 第二影像信息;
[0382]
103c 第三影像信息;
[0383]
103d 第四影像信息;
[0384]
104 第二声音输入装置;
[0385]
105 第二声音输出装置;
[0386]
106 第二拍摄装置;
[0387]
110 控制装置;
[0388]
110a 运算处理器;
[0389]
110b 储存器;
[0390]
110c 输入器;
[0391]
201 第一空间;
[0392]
202 第二空间;
[0393]
203 第三空间;
[0394]
204 卷帘;
[0395]
205 卷帘;
[0396]
206 卷帘;
[0397]
210 分隔部件;
[0398]
220 基台;
[0399]
221 遮挡板;
[0400]
222 开口部;
[0401]
230 定位器;
[0402]
231 主体;
[0403]
232 被抵接部;
[0404]
233 下颚放置台;
[0405]
300 消毒装置;
[0406]
j1 旋转关节;
[0407]
j2 旋转关节;
[0408]
j3 直动关节;
[0409]
j4 旋转关节;
[0410]
j5 旋转关节;
[0411]
j6 旋转关节;
[0412]
l1 旋转轴线;
[0413]
l2 旋转轴线;
[0414]
l3 旋转轴线;
[0415]
l4 旋转轴线;
[0416]
l5 旋转轴线。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。