1.本实用新型涉及一种控制舵面,可应用于飞行器的升降舵和方向舵等控制舵面,属于增加控制舵面偏转效率、改善舵效随偏转角度的变化线性度、并且能减小飞行器阻力的装置。另外,本实用新型还涉及一种飞行器。
背景技术:
2.诸如商用客机之类的飞行器的升降舵和方向舵等控制舵面在偏转过程中,在控制舵面随着偏转角度增加期间,控制舵面的后段可以伸出额外的面积,并且在控制舵面回归中立位置后,能够完全收回随偏转增加的面积。
3.为了提升方向舵舵效,增加面积和尾力臂是比较有效的手段,但是会存在以下技术难点:
4.(1)对于通过增加面积来提升方向舵舵效的方式:如果直接增加控制舵面的面积,则往往意味着更大巡航阻力,这降低了例如大型客机的飞行器的经济性和竞争力。
5.(2)对于增加尾力臂来提升方向舵舵效的方式:改善舵效的效率较低,且会大幅更改飞行器总体设计,有潜在的发生未知问题的风险。
6.因此,设计一种不增加巡航阻力又同时有效地增加舵效的控制舵面的形式极为重要。
7.在由中国航空工业集团公司西安飞机设计研究所于2017年8月1日提交的、题为《一种升降舵》、公开号为cn107512384的发明专利中,公开了一种升降舵,其中以升降舵偏转来实现飞机的纵向配平与操纵,避免因设置平尾安装角调整机构而带来的结构布置、重量、疲劳载荷和可靠性等一系列问题。然而,该升降舵在偏转时无法增大控制舵面面积。
8.在由空中客车操作有限责任公司于2018年1月15日提交的、题为《升力面》、公开号为cn108327895的发明专利中,提出了一种具有涡流发生器的升力面,通过可移动间断部,使升降舵偏转来实现涡流发生器收缩,以达到延迟气流分离和失速,提高升力/控制面有效性的作用。然而,该发明主要是通过在安定面上开缝,收缩涡流发生器来起到增加舵效等效果,而不能增大升降舵面积。
9.因此迫切需要一种控制舵面,该控制舵面能够减轻或者克服现有技术的控制舵面中的缺点中的一个或多个。
技术实现要素:
10.本实用新型的目的是提出一种控制舵面,该控制舵面依靠舵面偏转时机构的运动,使作动器作动,从而伴随控制舵面的偏转,实现舵面面积的增加,从而实现提升控制舵面舵效的目的。此外,通过对舵面偏转角度和舵面伸出量比例关系进行调整,可以调整飞行器舵效随舵面偏转变化的线性度。
11.根据本实用新型的一个方面,提供了一种控制舵面,该控制舵面可以包括:
12.固定面,固定面固定到飞行器的翼部;
13.伸缩舵面,伸缩舵面附连到固定面,并且能够绕枢转轴线枢转;
14.第一作动器,第一作动器的第一端枢转地固定到固定面,而第一作动器的第二端枢转地固定到伸缩舵面,第一作动器的作动使得伸缩舵面绕枢转轴线枢转;
15.其中,伸缩舵面可以包括固定部分、活动部分以及附连在固定部分与活动部分之间的第二作动器,第二作动器的作动(例如伸长或缩回等)能够改变活动部分相对于固定部分的位置。
16.这种控制舵面是一种伴随伸缩舵面的运动而可伸缩的控制舵面。在伸缩舵面的枢转以及其活动部分相对于固定部分的移动过程中(例如偏转过程中),伸缩舵面能够在控制舵面弦长方向上伸长,从而达到控制舵面随舵面偏转角度的增加而弦长增长的目的。
17.根据本实用新型的上述方面,较佳地,固定部分可以包括引导槽,而活动部分可以具有引导部,引导部的形状与引导槽的形状可以匹配,以容纳在引导槽中。
18.这样,在控制舵面回归中立位置(初始未伸出)后,能够完全收回随偏转增加的面积,从而使得在不需要时减少舵面面积,以减少飞行器的阻力,进而提高燃油收益。
19.根据本实用新型的上述方面,较佳地,第二作动器可以是线性作动器,并且第二作动器的伸长可与使活动部分远离固定部分移动。通过使活动部分远离固定部分移动,能够方便且可靠地增大伸缩舵面的面积。
20.根据本实用新型的上述方面,较佳地,第二作动器还可以包括复位弹簧,复位弹簧附连在固定部分和活动部分之间,并且在固定部分和活动部分之间施加朝向彼此的预紧力。
21.这样,在控制舵面在中立位时,舵面可伸缩部分(伸缩舵面)在弹簧预紧力的作用下,处于收起状态,能够避免活动部分的意外伸出,从而确保控制舵面的安全性,并且确保降低伸缩舵面的面积。
22.根据本实用新型的上述方面,较佳地,控制舵面还可以包括连杆机构,连杆机构枢转地连接在固定面与伸缩舵面的固定部分之间,用于配合第二作动器的作动,以支承/协助伸缩舵面绕枢转轴线枢转。这样,连杆机构可以跟随第二作动器被动运动,并且协助第二作动器支承伸缩舵面,从而确保飞行时的舵面稳定性。
23.根据本实用新型的上述方面,较佳地,连杆机构可以包括铰接在一起的第一连杆和第二连杆,其中,第一连杆的远离第二连杆的端部铰接到伸缩舵面的固定部分,而第二连杆的远离第一连杆的端部固定地连接到固定面。这样,简化了连杆机构的设计并提高了可靠性。
24.根据本实用新型的上述方面,较佳地,枢转轴线可以定位在固定部分的中间位置,并且第一作动器的第二端在枢转轴线的上方枢转地固定到伸缩舵面,使得第一作动器的伸长引起伸缩舵面的自由端向下偏转。这种布置可以在增大偏转度与保持伸缩舵面的稳定性之间获得折衷。
25.根据本实用新型的上述方面,较佳地,控制舵面还可以包括第三作动器,第三作动器与第一作动器关于枢转轴线对称布置,其中,第三作动器的第一端枢转地固定到固定面,而第三作动器的第二端在枢转轴线的下方枢转地固定到伸缩舵面。
26.第三作动器能够主动起作用以与第一作动器配合动作,以控制伸缩舵面的偏转,例如在第一作动器推动伸缩舵面时,第三作动器可以拉动伸缩舵面,从而能够提供更稳定
且更大的作动力,以控制伸缩舵面的偏转,并且将伸缩舵面更稳定地保持在偏转后的位置。
27.控制舵面还可以包括信号传送装置,信号传送装置连通第一作动器和第二作动器,以在第一作动器和第二作动器之间传输信号。信号传送装置可以协调第一作动器和第二作动器的作动,使得伸缩舵面的活动部分在固定部分被偏转后远离固定部分移动,从而实现期望的控制舵面的面积的增大及舵面偏转,即、实现一种伴随运动可伸缩的控制舵面。
28.根据本实用新型的另一方面,提供了一种飞行器,其中,该飞行器可以包括根据以上方面所述的控制舵面。
29.由此可以看出:在相同控制舵面中立位置面积条件下,本实用新型的控制舵面具有更高的控制舵面效率;通过增加的舵面面积与舵面偏转角度的对应关系,本实用新型的控制舵面能够调整舵效与舵偏的对应关系,可以提升舵效随舵面偏转的线性度;另外,在相同舵效的情况下,根据本实用新型的控制舵面拥有更小的中立位置面积,以及更低的飞行器巡航阻力。由于大型客机每减小1count的阻力,可分别多载旅客约2500~3700人次/架/年,燃油收益分别约50~260万元/架/年,因此,根据本实用新型的控制舵面具有较高的经济效益。
30.由此,通过本实用新型的控制舵面能够满足使用要求,实现了预定的目的。
附图说明
31.为了进一步清楚地描述根据本实用新型的控制舵面,下面将结合附图和具体实施方式对本实用新型进行详细说明,在附图中:
32.图1是根据本实用新型的第一非限制性实施例的控制舵面处于未偏转状态的示意图;
33.图2是根据本实用新型的第一非限制性实施例的控制舵面处于偏转后的状态的示意图;
34.图3是图1和图2中所示的控制舵面的状态的比较;
35.图4是根据本实用新型的第二非限制性实施例的控制舵面处于未偏转状态的示意图;
36.图5是根据本实用新型的第二非限制性实施例的控制舵面的未偏转状态与偏转后的状态的比较;
37.图6是根据本实用新型的第三非限制性实施例的控制舵面处于未偏转状态的示意图;
38.图7是根据本实用新型的第四非限制性实施例的控制舵面处于未偏转状态的示意图;
39.图8是根据本实用新型的第四非限制性实施例的控制舵面处于偏转后的状态的示意图;以及
40.图9是图7和图8中所示的控制舵面的状态的比较。
41.上述附图仅仅是示意性的,未严格按照比例绘制。
42.图中的附图标记在附图和实施例中的列表:
43.100-控制舵面,包括:
44.10-固定面;
45.20-伸缩舵面,包括:
46.21-固定部分,包括:
47.21a-引导槽;
48.22-活动部分,包括:
49.22a-引导部;
50.22b-自由端;
51.23-第二作动器;
52.30-第一作动器,包括:
53.31-第一端;
54.32-第二端;
55.40-连杆机构,包括:
56.41-第一连杆;
57.42-第二连杆;
58.50-第三作动器,包括:
59.51-第一端;
60.52-第二端;
61.60-信号传送装置;
62.a-枢转轴线。
具体实施方式
63.应当理解,除非明确地指出相反,否则本实用新型可以采用各种替代的取向和步骤顺序。还应当理解,附图中所示及说明书中的具体装置仅是本文公开和限定的实用新型构思的示例性实施例。因而,除非另有明确的声明,否则所公开的各种实施例涉及的具体取向、方向或其它物理特征不应被视为限制。
64.升降舵是飞行器水平尾翼可操纵的部分,主要作用是控制飞机的俯仰运动,这种俯仰运动的强度由重心和水平尾翼面的距离(力臂的大小)和水平尾部翼面上气动力有效性决定。方向舵是指在垂直尾翼上为实现飞机航向操纵的可活动的翼面部分。一般用铰链连接在垂直安定面后部。驾驶员可通过脚蹬操纵它左右偏转,从而控制飞机航向。本实用新型中提到的控制舵面可以是应用于升降舵的控制舵面,也可以是应用于方向舵的控制舵面。
65.下面结合附图来具体说明根据本实用新型的非限制性实施例的控制舵面100。
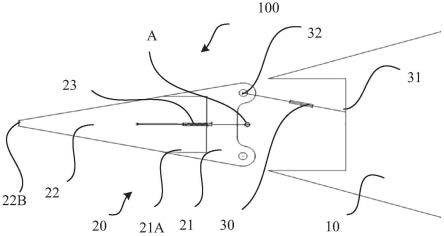
66.图1是根据本实用新型的第一非限制性实施例的控制舵面100处于未偏转状态的示意图。
67.如图所示并且作为非限制性实施例,该第一实施例的控制舵面100可以包括:固定面10、伸缩舵面20和第一作动器30。
68.固定面10可以固定到飞行器的翼部或者是翼部的一部分。如本文所用,术语“翼部”可以是指飞行器的例如机翼、尾翼(包括平尾、垂尾等)或类似的结构。例如固定面10可以固定到水平尾翼或者垂直尾翼,或者是平尾翼或者垂直尾翼的一部分,即与平尾翼或者垂直尾翼成整体。固定面10主要用于承载伸缩舵面20,并且用于安装相应的作动装置。
69.伸缩舵面20可以附连到固定面10,例如伸缩舵面20可以借助枢转轴铰接到固定面10,并且能够绕枢转轴线a枢转。枢转轴例如可以在两端处固定连接到固定面10,而在中间经由套筒等枢转地连接到伸缩舵面20。该枢转轴线a可以是枢转轴的中心轴线。例如,伸缩舵面20可以借助第一作动器30的作动以绕枢转轴线a枢转。
70.在替代实施例中,可以不存在枢转轴,例如伸缩舵面20在与附图中的上下方向垂直的前后方向的两端处铰接到固定面10。此时,枢转轴线a可以是连接在两个铰接部的中心之间的轴线。
71.如图所示,伸缩舵面20可以包括固定部分21、活动部分22以及第二作动器23。
72.固定部分21可以包括引导槽21a,该引导槽21a可以设置在固定部分21的中间部分,并且在与固定面10相反的方向上开口,该开口可以是矩形开口的形式。
73.活动部分22可以具有引导部22a和自由端22b。引导部22a的形状与引导槽21a的形状匹配,以容纳在引导槽21a中,例如附图中示出的具有大致矩形的横截面。自由端22b也是伸缩舵面20的最末端,并且可以具有大致三角形的截面。当然伸缩舵面20也可以具有大致弧形的轮廓。
74.第二作动器23附连在固定部分21与活动部分22之间,例如,第二作动器23的两端分别固定连接到固定部分21与活动部分22,使得第二作动器23的作动改变活动部分22相对于固定部分21的位置。
75.作为非限制性实施例,第二作动器23可以是线性作动器,例如气动缸、直线电机等,并且第二作动器23的伸长使活动部分22远离固定部分21移动,而第二作动器23的缩回使活动部分22朝向固定部分21移动。
76.另外,较佳地,第二作动器23还可以包括复位弹簧,复位弹簧附连在固定部分21和活动部分22之间,并且在固定部分21和活动部分22之间施加朝向彼此的预紧力。
77.复位弹簧可以是本领域已知的任何类型的直线弹簧或者扭簧等,只要其对固定部分21和活动部分22之间施加预紧力即可,因此,为简洁起见,本实用新型对此不再详细描述。
78.如图1中示出的,第一作动器30的第一端31可以枢转地固定到固定面10,而第一作动器的第二端32可以枢转地固定到伸缩舵面20,以便在作动时,适应与它们之间的连接角度的变化。
79.如本文所用,描述“枢转地固定”例如可以包括铰接、枢轴连接等连接方式。例如为了使第一作动器30的第一端31枢转地固定到固定面10,第一端31可以借助枢轴连接到固定面10的一部分,使得第一作动器30与固定面10之间的角度可以围绕枢轴改变。
80.图2是根据本实用新型的第一非限制性实施例的控制舵面100处于偏转后的状态的示意图。
81.如图2所示,第一作动器30已经伸长,使得伸缩舵面20绕枢转轴线a枢转,即逆时针旋转。此时,活动部分22的自由端22b向下偏转。同时,第二作动器23伸长,使得引导部22a沿着引导槽21a移动,进而使活动部分22远离固定部分21移动,即,保持在图2所示的位置。
82.此时,伸缩舵面20随控制舵面100弦长方向的伸长,达到控制舵面100随舵面偏转角度的增加而弦长增长的目的,从而增大了控制舵面100面积,进而提升了控制舵面100的舵效。
83.图3是图1和图2中所示的控制舵面100的状态的比较。如图所示,伸缩舵面20向下偏转并且伸长,并且控制舵面100面积增加,即,由虚线示出的偏转后且伸长的伸缩舵面20的面积大于实线示出的未偏转且缩回的处于中立面(初始位置)的伸缩舵面20的面积。
84.图4是根据本实用新型的第二非限制性实施例的控制舵面100处于未偏转状态的示意图;图5是根据本实用新型的第二非限制性实施例的控制舵面100的未偏转状态与偏转后的状态的比较。
85.该实施例的的控制舵面100与图1-3中示出的第一实施例的不同在于,在图4和5中示出的实施例中,控制舵面100还包括连杆机构40,连杆机构40枢转地连接在固定面10与伸缩舵面20的固定部分21之间,用于配合第二作动器23的作动,以支承伸缩舵面20绕枢转轴线a枢转。
86.较佳地,连杆机构40包括铰接在一起的第一连杆41和第二连杆42,其中,第一连杆41的远离第二连杆42的端部铰接到伸缩舵面20的固定部分21,而第二连杆42的远离第一连杆41的端部固定地连接到固定面10。
87.这样,在第一作动器30作动时(例如伸长或收缩时),伸缩舵面20的固定部分21能够围绕枢转轴线枢转。此时,第一连杆41和第二连杆42之间的夹角会相应改变,以被动地跟随固定部分21的偏转移动,从而为固定部分21提供辅助支承。
88.如图所示并且作为非限制性实施例,枢转轴线a可以定位在固定部分21的中间位置,例如关于上下方向对称的中间位置,并且第一作动器30的第二端32在枢转轴线a的上方枢转地固定到伸缩舵面20,使得第一作动器30的伸长引起伸缩舵面20的自由端22b向下偏转。
89.图6是根据本实用新型的第三非限制性实施例的控制舵面100处于未偏转状态的示意图。
90.该实施例的的控制舵面100与图1-3中示出的第一实施例的不同在于,在图6中示出的实施例中,控制舵面100还包括第三作动器50,第三作动器50与第一作动器30关于枢转轴线a对称布置,其中,第三作动器50的第一端51枢转地固定到固定面10,而第三作动器50的第二端52在枢转轴线a的下方枢转地固定到伸缩舵面20。
91.应当理解,虽然在附图示出的实施例中,第一作动器30和第三作动器50分别在枢转轴线a的上方和下方枢转地固定到伸缩舵面20,但是本领域技术人员可以设想其余的布置形式,例如相反地布置,并行的布置等。
92.图7是根据本实用新型的第四非限制性实施例的控制舵面100处于未偏转状态的示意图;图8是根据本实用新型的第四非限制性实施例的控制舵面100处于偏转后的状态的示意图;而图9是图7和图8中所示的控制舵面100的状态的比较。
93.该实施例的控制舵面100与图4-5中示出的第二实施例的不同在于,在图7-9中示出的实施例中,控制舵面100还包括信号传送装置60,信号传送装置连通第一作动器30和第二作动器23,以在第一作动器30和第二作动器23之间传输信号。
94.信号传送装置60在附图中示出为有线连接方式,但是替代地也可以是无线连接的方式,并且可以包括未示出的控制器等,以协调各个作动器的操作。
95.另外,在控制舵面100包括第三作动器50的实施例(例如参照图6示出的实施例)中,信号传送装置60还可以连接到第三作动器50。信号传送装置60可以用于确保在伸缩舵
面20偏转时,跟随该伸缩舵面20的偏转运动,伸缩舵面20的活动部分22远离固定部分21移动,从而形成一种伴随运动可伸缩的控制舵面20。
96.此时,伸缩舵面20随固定部分21的偏转在控制舵面100的弦长方向上伸长,达到控制舵面100随舵面偏转角度的增加而弦长增长的目的,从而增大了控制舵面100面积,进而提升了控制舵面100的舵效。
97.综上所述,根据本实用新型的控制舵面100能够通过增加控制舵面的面积来增加舵效,通过舵偏角度和舵面伸出量比例关系的设计来改善控制舵面效率的线性度,并且通过减小控制舵面中立位置面积,来实现飞行器减阻的目标。
98.如本文所用的表示方位或取向的术语“上方”、“下方”、“上下方向”、“前后方向”以及用于表示顺序的用语“第一”、“第二”等仅仅是为了使本领域普通技术人员更好地理解以较佳实施例形式示出的本实用新型的构思,而非用于限制本实用新型。除非另有说明,否则所有顺序、方位或取向仅用于区分一个元件/部件/结构与另一个元件/部件/结构的目的,并且除非另有说明,否则不表示任何特定顺序、操作顺序、方向或取向。例如,在替代实施例中,“第一作动器”可以替代地是指“第三作动器”。
99.综上所述,根据本实用新型的实施例的控制舵面100克服了现有技术中的缺点,实现了预期的实用新型目的。
100.虽然以上结合了较佳实施例对本实用新型的控制舵面进行了说明,但是本技术领域的普通技术人员应当认识到,上述示例仅是用来说明的,而不能作为对本实用新型的限制。因此,可以在权利要求书的实质精神范围内对本实用新型进行各种修改和变型,这些修改和变型都将落在本实用新型的权利要求书所要求的范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。