1.本实用新型涉及服务机器人电磁兼容检测辅助设备技术领域,特别是涉及一种移动式服务机器人电磁兼容检测的带载式工装夹具。
背景技术:
2.根据gb/t 37284-2019服务机器人电磁兼容通用标准发射要求和限值规定,移动式服务机器人应当依照制造商规定的典型工作状态并充分运行(启动和性能性试验)。而目前市场上的电磁兼容实验室均采用的是驱动轮悬空的测量方法,其测量方法存在一定缺陷——空载时的工作状态无法代表其负载时临界的工作状态(即额定功率下的运行状态)。驱动轮悬空的测量方法只能作为受试机器人的整改依据,但无法作为它通过标准的依据。
3.驱动轮悬空的测量方法能够很好的测量其充电模式和回充寻找模式下的辐射发射,但是对于工作模式测试状态却有所偏差,无法代表受试机器人进行严苛工况的工作状态下的辐射发射值和辐射抗扰度。显然这种测量方法无法满足上述标准的测试要求.
4.传统的驱动轮悬空的电磁兼容测试系统对移动式服务机器人使用悬空的方式进行测试,但在检测其额定功率的工作状态时的辐射发射值和辐射抗扰度时,无法达到厂商所规定的典型工作状态下的额定工况,其辐射发射值未达到最大的发射状态,这将会影响到机器人辐射测量的最终结果和辐射抗干扰测量的功能判定等级。且该测试系统无法测量移动式服务机器人工作时的功率值。
技术实现要素:
5.本实用新型所要解决的技术问题是:为了克服现有技术中的不足,本实用新型提供一种移动式服务机器人电磁兼容检测的带载式工装夹具,实现移动式服务机器人的带载测试。
6.本实用新型解决其技术问题所要采用的技术方案是:一种移动式服务机器人电磁兼容检测的带载式工装夹具,包括前基体、后基体、升降台组件、伸缩组件、阻力托辊、自由托辊和阻尼器,所述前基体和后基体分别设置在前后两侧,所述前基体和后基体的左右两侧面分别通过一伸缩组件连接,所述伸缩组件能够调整前基体和后基体之间的距离,所述升降台组件设置在后基体上,用于承托服务机器人的从动轮侧,所述阻力托辊和自由托辊平行设置在左右两侧的伸缩组件之间,用于承托服务机器人的驱动轮侧,且所述阻力托辊与阻尼器传动连接,用于向驱动轮加载。
7.测试时,服务机器人的驱动轮支撑在阻力托辊和自由托辊之间,通过阻尼器可以向阻力托辊上施加阻力,该阻力在摩擦力的作用下会施加在驱动轮上,实现驱动轮的加载,能够模拟服务机器人的实际环境下的运行情况,提高了测试的准确性。
8.由于不同服务机器人驱动轮的大小不同,因此,为了适用不同外径的驱动轮尺寸,进一步,还包括轴距调节组件,所述轴距调节组件包括螺纹调节组件和随动调节组件,所述自由托辊一端与螺纹调节组件连接,另一端与随动调节组件连接,通过螺纹调节组件能够
调节自由托辊和阻力托辊之间的轴距,所述随动调节组件能够随同螺纹调节组件同步运动。通过轴距调节组件可以调节阻力托辊和自由托辊之间的轴距,以适应不同尺寸驱动轮的服务机器人的测试。
9.进一步,所述螺纹调节组件包括第一支撑座、螺纹杆和螺纹套,所述第一支撑座设置在前基体的一侧,所述螺纹套套设在螺纹杆上,且与螺纹杆螺纹连接,所述螺纹杆的前后两端转动连接在第一支撑座上,所述螺纹套的外壁上设有螺纹套轴部,所述自由托辊的两端设有托辊轴部,所述螺纹套轴部和一侧的托辊轴部通过一外六角螺管连接,连接时,螺纹套轴部和托辊轴部的端面对正,接头处的外部通过一根加长的外六角螺管包住,使其拥有良好的稳定性,并大大的降低了组装的难度。
10.为了保证自由托辊两端同步运动,使自由托辊和阻力托辊保持平行状态,随动调节组件是随同螺纹调节组件运动的,因此,随动调节组件无需施加扭矩,因此,进一步,所述随动调节组件包括第二支撑座、滑动杆和滑动套,所述第二支撑座设置在远离螺纹调节组件一侧的前基体上,所述滑动套套设在滑动杆上,且与滑动杆滑动连接,所述滑动杆的前后两端转动连接在第二支撑座上,所述滑动套的外壁上设有滑动套轴部,所述自由托辊的两端设有托辊轴部,所述滑动套轴部和一侧的托辊轴部通过一外六角螺管连接,连接时,滑动套轴部和托辊轴部的端面对正,接头处的外部通过一根加长的外六角螺管包住,使其拥有良好的稳定性,并大大的降低了组装的难度。
11.具体的,所述升降台组件包括升降台和升降杆,所述升降台平行设置在后基体的上方,且底部通过多个升降杆与后基体连接,所述升降台上表面为压花面,压花可以是瓦楞或网纹等,以提高与从动轮之间的摩擦力,保证测试时的稳定。
12.具体的,所述后基体设有台阶面,所述台阶面低于后基体的上表面,台阶面上设有与升降杆数量相同的连接孔,升降杆通过连接孔与后基体连接,将所述升降台组件设置在台阶面上。
13.进一步,所述前基体上设有至少一个阻尼器安装槽,至少有一个阻尼器安装槽内安装有所述阻尼器。不同服务机器人测试时,需要提供的阻尼不尽相同,因此,在前基体上预留多个阻尼器安装槽,根据提供的阻尼大小来设置阻尼器的数量,阻尼器通过皮带与阻力托辊连接。
14.作为优选,所述伸缩组件包括至少一个伸缩杆,所述伸缩杆包括杆芯和杆套,所述杆芯设置在杆套内部,且能够相对杆套伸缩,所述杆套的端部固定连接在后基体上,所述杆芯的端部固定连接在前基体上。
15.为了提高伸缩的稳定性,作为优选,每侧的伸缩杆为两个,且两个所述伸缩杆上下设置,即一个伸缩杆位于上方,一个伸缩杆位于下方。
16.进一步,为了提高传动的稳定性,所述阻力托辊的外周面上设有传动连接部,所述传动连接部的表面进行粗糙处理。采用皮带实现阻力托辊和阻尼器的连接,传动连接部表面进行粗糙处理,以增大与皮带之间的摩擦力,避免测试时打滑。
17.作为优选,该工装夹具还配适了水平仪,可以准确的调整受试机器人的水平位置。阻力托辊之上还链接了磁阻尼器减速系统,可以对托辊自由的施加阻力以更精准的模拟各种工作状态。系统还搭载了功率检测装置,可以实时检测受试机器人的工作功率,可以准确的测量出典型工作状态下的辐射发射值,以减少试验误差,得出更准确的试验数据。
18.本实用新型的有益效果是:该工装夹具集基体、伸缩滑杆、传动螺纹式伸缩机构于一体,可以精准调节外观尺寸和驱动轮轮距,可以试验当前市场上绝大部分型号的移动式服务机器人,适用性广。托辊之间创新式搭载了传动螺纹式伸缩机构,通过可拆卸摇动把手可以更加牢固并精准平滑的调节托辊之间的轮距,并且该机构能够承受更大的负荷并且不会因此而改变托辊之间的轮距。升降台、托辊的传动螺纹伸缩机构和水平仪的组合可以可以准确的保持受试机器人整体的水平放置,并增加整个检测过程的稳定性与可靠性。磁阻尼器通过铰链皮带与托辊进行链接,可以自由调节受试机器人的运行阻力以完美模拟受试机器人的工作状态,使测试的结果更准确,更具有可靠性。
附图说明
19.下面结合附图和实施例对本实用新型作进一步说明。
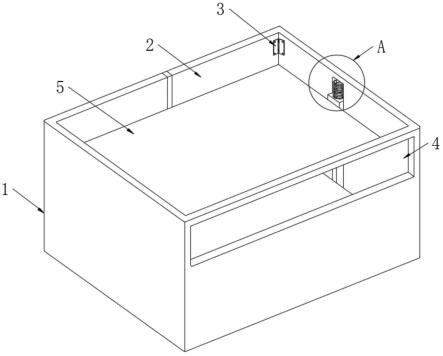
20.图1是移动式服务机器人的结构示意图。
21.图2是本实用新型工装夹具的使用状态示意图。
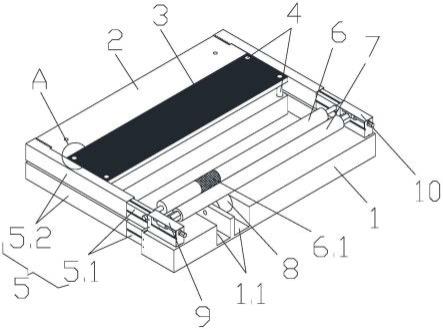
22.图3是本实用新型工装夹具的立体结构示意图。
23.图4是图3中a处的放大结构示意图。
24.图5是本实用新型工装夹具的俯视结构示意图。
25.图6是后基体的结构示意图。
26.图7是自由托辊的连接结构示意图。
27.图8是自由托辊的连接结构示意图(不含支撑座)。
28.图9是图7中自由托辊轴向剖面结构示意图。
29.图中:100、工装夹具,1、前基体,1.1、阻尼器安装槽,2、后基体,2.1、台阶面,2.2、连接孔,3、升降台,4、升降杆,5、伸缩杆,5.1、杆芯,5.2、杆套,6、阻力托辊,6.1、传动连接部,7、自由托辊,7.1、托辊轴部,8、阻尼器,9、螺纹调节组件,9.1、第一支撑座,9.2、螺纹杆,9.3、螺纹套,9.31、螺纹套轴部,10、随动调节组件,10.1、第二支撑座,10.2、滑动杆,10.3、滑动套,10.31、滑动套轴部,11、外六角螺管,200、服务机器人,201、驱动轮,202、从动轮。
具体实施方式
30.现在结合附图对本实用新型作详细的说明。此图为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。方向和参照(例如,上、下、左、右、等等) 可以仅用于帮助对附图中的特征的描述。因此,并非在限制性意义上采用以下具体实施方式,并且仅仅由所附权利要求及其等同形式来限定所请求保护的主题的范围。
31.服务机器人底部的驱动轮和从动轮数量是不尽相同的,本实施例以图1所示的服务机器人为例,对工装夹具100的使用及结构进行说明,图中,服务机器人200的底部设有两个驱动轮201和两个从动轮202,测试时,驱动轮201处于运转状态,从动轮202处于静止状态。
32.如图2所示,测试时,需要将服务机器人200放置在工装夹具100上,且主动轮201支撑在阻力托辊6和自由托辊7上,从动轮202支撑在升降台3上。
33.如图3所示,本实用新型的一种移动式服务机器人电磁兼容检测的带载式工装夹
具100,包括前基体1、后基体2、升降台组件、伸缩组件、阻力托辊6、自由托辊7和阻尼器8,所述前基体1和后基体2分别设置在前后两侧,所述前基体1和后基体2的左右两侧面分别通过一伸缩组件连接,所述伸缩组件能够调整前基体1和后基体2之间的距离,所述升降台组件设置在后基体2上,用于承托服务机器人的从动轮侧,所述阻力托辊6和自由托辊7平行设置在左右两侧的伸缩组件之间,用于承托服务机器人的驱动轮侧,且所述阻力托辊6与阻尼器8传动连接,用于向驱动轮加载。
34.测试时,服务机器人的驱动轮支撑在阻力托辊6和自由托辊7之间,通过阻尼器8可以向阻力托辊6上施加阻力,该阻力在摩擦力的作用下会施加在驱动轮上,实现驱动轮的加载,能够模拟服务机器人的不同环境下的运行情况,提高了测试的准确性。
35.由于不同服务机器人驱动轮的大小不同,因此,为了适用不同外径的驱动轮尺寸,进一步,还包括轴距调节组件,所述轴距调节组件包括螺纹调节组件9和随动调节组件10,所述自由托辊7一端与螺纹调节组件9连接,另一端与随动调节组件10连接,通过螺纹调节组件9能够调节自由托辊7和阻力托辊6之间的轴距,所述随动调节组件10能够随同螺纹调节组件9同步运动。通过轴距调节组件可以调节阻力托辊6和自由托辊7之间的轴距,以适应不同尺寸驱动轮的服务机器人的测试。
36.前基体1上设有至少一个阻尼器安装槽1.1,至少有一个阻尼器安装槽1.1内安装有所述阻尼器8。不同服务机器人测试时,需要提供的阻尼不尽相同,因此,在前基体1上预留多个阻尼器安装槽1.1,根据提供的阻尼大小来设置阻尼器8的数量,阻尼器8通过皮带(图中未示出)与阻力托辊6连接;本实施例中阻尼器安装槽1.1有两个,其中一个内安装有阻尼器8。后基体2设有台阶面2.1,所述台阶面2.1低于后基体2的上表面,台阶面2.1上设有与升降杆4数量相同的连接孔2.2,升降杆4通过连接孔2.2与后基体2连接,将所述升降台组件设置在台阶面2.1上。本实施例中,连接孔2.2为螺纹孔,升降杆4上具有螺纹,通过螺纹连接,便于升降台3的水平调整。前基体1和后基体2采用环氧树脂制成,且环氧树脂的相对介电常数大于1.4。
37.伸缩组件包括至少一个伸缩杆5,所述伸缩杆5包括杆芯5.1和杆套5.2,所述杆芯5.1设置在杆套5.2内部,且能够相对杆套5.2伸缩,所述杆套5.2的端部固定连接在后基体2上,所述杆芯5.1的端部固定连接在前基体1上。为了提高伸缩的稳定性,本实施例中,每侧的伸缩杆5为两个,且两个所述伸缩杆5上下设置,左右两侧下层伸缩杆5的杆芯5.1端部与前基体1固定连接,左右两侧上层伸缩杆5的杆芯5.1端部分别与第一支撑座9.1和第二支撑座10.1固定连接,且上层伸缩杆5的杆芯5.1端部还设有贯穿杆芯5.1的轴孔,用于阻力托辊6两端的轴部连接。
38.升降台组件包括升降台3和升降杆4,所述升降台3平行设置在后基体2的上方,且底部通过多个升降杆4与后基体2连接,所述升降台3上表面为压花面,压花可以是瓦楞或网纹等,以提高与从动轮之间的摩擦力,保证测试时的稳定。
39.螺纹调节组件9包括第一支撑座9.1、螺纹杆9.2和螺纹套9.3,所述第一支撑座9.1设置在前基体1的左侧,所述螺纹套9.3套设在螺纹杆9.2上,且与螺纹杆9.2螺纹连接,所述螺纹杆9.2的前后两端转动连接在第一支撑座9.1上,所述螺纹套9.3的外壁上设有螺纹套轴部9.31,所述自由托辊7的两端设有托辊轴部7.1,所述螺纹套轴部9.31和一侧的托辊轴部7.1通过一外六角螺管11连接,连接时,螺纹套轴部9.31和托辊轴部7.1的端面对正,接头
处的外部通过一根加长的外六角螺管11包住,使其拥有良好的稳定性,并大大的降低了组装的难度。实现螺纹杆9.2转动的方式有多种,本实施例中螺纹杆9.2的前端伸出第一支撑座9.1,端部为外六角结构,可以采用可拆卸的内六角把手来进行手动的调整,调整完后可以将把手直接取下,也可以直接使螺纹杆9.2与电机驱动结构连接,实现自动的控制。
40.为了保证自由托辊7两端同步运动,使自由托辊7和阻力托辊6保持平行状态,随动调节组件10是随同螺纹调节组件9运动的,因此,随动调节组件10无需施加扭矩,因此,进一步,所述随动调节组件10包括第二支撑座10.1、滑动杆10.2和滑动套10.3,所述第二支撑座10.1设置前基体1的右侧,所述滑动套10.3套设在滑动杆10.2上,且与滑动杆10.2滑动连接,所述滑动杆10.2的前后两端转动连接在第二支撑座10.1上,所述滑动套10.3的外壁上设有滑动套轴部10.31,所述自由托辊7的两端设有托辊轴部7.1,所述滑动套轴部10.31和一侧的托辊轴部7.1通过一外六角螺管11连接,连接时,滑动套轴部10.31和托辊轴部7.1的端面对正,接头处的外部通过一根加长的外六角螺管11包住,使其拥有良好的稳定性,并大大的降低了组装的难度。
41.本实施例中阻力托辊6和自由托辊7采用的结构是托辊的常规结构,其两端的轴部和中间的辊部之间是能够相对转动的,因此,示意图中未画出具体连接关系。为了提高传动的稳定性,所述阻力托辊6的外周面上设有传动连接部6.1,所述传动连接部6.1的表面进行粗糙处理。本实施例中采用皮带实现阻力托辊6和阻尼器8的连接,传动连接部6.1表面进行粗糙处理,以增大与皮带之间的摩擦力,避免测试时打滑。阻尼器8是一种比较成熟的器件,其上具有用于传动连接的轴部,阻尼器8轴部与阻力托辊6的传动连接部6.1通过皮带传动连接。
42.采用本实用新型的带载式工装夹具100进行辐射发射和辐射抗扰度的测试时,可对待测的移动式服务机器人进行典型工作状态下的辐射发射值和辐射抗扰度进行准确的测量。可以精准调节外观尺寸、驱动轮轮距和驱动阻力,可适应市面上绝大部分的移动式服务机器人并可对各种情形下的工作状态进行模拟同时可实时检测运行功率以达到精准测量其额定工况下的辐射发射值和辐射抗扰度。
43.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关的工作人员完全可以在不偏离本实用新型的范围内,进行多样的变更以及修改。本项实用新型的技术范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。