技术特征:
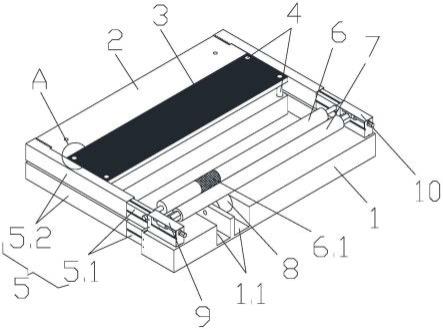
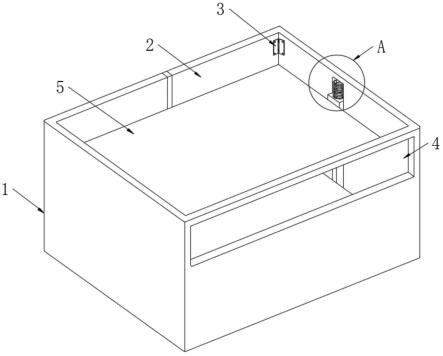
1.一种移动式服务机器人电磁兼容检测的带载式工装夹具,其特征在于:包括前基体、后基体、升降台组件、伸缩组件、阻力托辊、自由托辊和阻尼器,所述前基体和后基体分别设置在前后两侧,所述前基体和后基体的左右两侧面分别通过一伸缩组件连接,所述伸缩组件能够调整前基体和后基体之间的距离,所述升降台组件设置在后基体上,用于承托服务机器人的从动轮侧,所述阻力托辊和自由托辊平行设置在左右两侧的伸缩组件之间,用于承托服务机器人的驱动轮侧,且所述阻力托辊与阻尼器传动连接,用于向驱动轮加载。2.如权利要求1所述的移动式服务机器人电磁兼容检测的带载式工装夹具,其特征在于:还包括轴距调节组件,所述轴距调节组件包括螺纹调节组件和随动调节组件,所述自由托辊一端与螺纹调节组件连接,另一端与随动调节组件连接,通过螺纹调节组件能够调节自由托辊和阻力托辊之间的轴距,所述随动调节组件能够随同螺纹调节组件同步运动。3.如权利要求2所述的移动式服务机器人电磁兼容检测的带载式工装夹具,其特征在于:所述螺纹调节组件包括第一支撑座、螺纹杆和螺纹套,所述第一支撑座设置在前基体的一侧,所述螺纹套套设在螺纹杆上,且与螺纹杆螺纹连接,所述螺纹杆的前后两端转动连接在第一支撑座上,所述螺纹套的外壁上设有螺纹套轴部,所述自由托辊的两端设有托辊轴部,所述螺纹套轴部和一侧的托辊轴部通过一外六角螺管连接。4.如权利要求2所述的移动式服务机器人电磁兼容检测的带载式工装夹具,其特征在于:所述随动调节组件包括第二支撑座、滑动杆和滑动套,所述第二支撑座设置在远离螺纹调节组件一侧的前基体上,所述滑动套套设在滑动杆上,且与滑动杆滑动连接,所述滑动杆的前后两端转动连接在第二支撑座上,所述滑动套的外壁上设有滑动套轴部,所述自由托辊的两端设有托辊轴部,所述滑动套轴部和一侧的托辊轴部通过一外六角螺管连接。5.如权利要求1所述的移动式服务机器人电磁兼容检测的带载式工装夹具,其特征在于:所述升降台组件包括升降台和升降杆,所述升降台平行设置在后基体的上方,且底部通过多个升降杆与后基体连接,所述升降台上表面为压花面。6.如权利要求1所述的移动式服务机器人电磁兼容检测的带载式工装夹具,其特征在于:所述后基体设有台阶面,所述台阶面低于后基体的上表面,所述升降台组件设置在台阶面上。7.如权利要求1所述的移动式服务机器人电磁兼容检测的带载式工装夹具,其特征在于:所述前基体上设有至少一个阻尼器安装槽,至少有一个阻尼器安装槽内安装有所述阻尼器。8.如权利要求1所述的移动式服务机器人电磁兼容检测的带载式工装夹具,其特征在于:所述伸缩组件包括至少一个伸缩杆,所述伸缩杆包括杆芯和杆套,所述杆芯设置在杆套内部,且能够相对杆套伸缩,所述杆套的端部固定连接在后基体上,所述杆芯的端部固定连接在前基体上。9.如权利要求8所述的移动式服务机器人电磁兼容检测的带载式工装夹具,其特征在于:每侧的伸缩杆为两个,且两个所述伸缩杆上下设置。10.如权利要求1所述的移动式服务机器人电磁兼容检测的带载式工装夹具,其特征在于:所述阻力托辊的外周面上设有传动连接部,所述传动连接部的表面进行粗糙处理。
技术总结
本实用新型提供一种移动式服务机器人电磁兼容检测的带载式工装夹具,包括前基体、后基体、升降台组件、伸缩组件、阻力托辊、自由托辊和阻尼器,前后基体的左右两侧面分别通过一伸缩组件连接,伸缩组件能够调整前基体和后基体之间的距离,升降台组件设置在后基体上,用于承托服务机器人的从动轮,阻力托辊和自由托辊平行设置在左右两侧的伸缩组件之间,用于承托服务机器人的驱动轮,且阻力托辊与阻尼器传动连接,用于向驱动轮加载。本工装夹具前后基体之间通过伸缩组件连接,可自由调节两基体间尺寸,能适应大多数的服务机器人的电磁兼容测试;基体上分别搭载了升降台和可调轴距式托辊,可以稳定的支撑不同尺寸的服务机器人,实现工作状态下检测。现工作状态下检测。现工作状态下检测。
技术研发人员:沙诗伟 张志鹏 张诚 朱李斌 林梅霞 杨晓勇 刘磊 梅海龙 张恒佳 高章
受保护的技术使用者:中汽研汽车检验中心(常州)有限公司
技术研发日:2022.05.20
技术公布日:2022/11/21
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。