1.本发明涉及工业机器人技术领域,具体涉及一种工业机器人用机械抓取装置。
背景技术:
2.随着科技的不断发展,工业使用的机器人的数量也来也多,应用范围也越来越广泛,工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。
3.工业机器人为了配合各功能模块的正常使用通常都设置有机械抓取装置,一般的抓取装置力度不容易控制,在抓取一些硬性不够的物件时,如纸质圆形箱体、塑料圆形箱体等圆形物件时,力度太大可能会对被抓取的物品造成损坏,力度较小的话,由于传统的抓取装置与圆形物件的接触面较小,这就会使得在抓取时导致物品脱落。
技术实现要素:
4.为解决上述技术问题,本发明提供一种工业机器人用机械抓取装置,包括:连接座,所述连接座上设置有连接柱,所述连接柱的两端分别贯穿连接座的两侧外壁并延伸至外侧,所述连接柱的延伸部外表面套设有轴承,所述连接柱与连接座通过轴承活动连接,所述连接座的正面外壁中轴处固定连接有连接盘,固定柱,所述固定柱固定连接在连接盘远离连接座的一侧外壁,所述固定柱外壁上开设有若干个滑槽,所述滑槽的内部固定连接有滑杆,所述滑杆外壁上滑动套设有移动块,所述移动块的侧壁固定连接有电动推杆,所述电动推杆远离移动块的一端与连接盘的侧壁固定连接,辅助板,所述辅助板的数量为四个,四个所述辅助板分别固定连接在固定柱远离连接盘的一端外壁,所述辅助板上开设有限位槽,所述限位槽内部中轴处固定连接有限位杆,所述限位杆上滑动设置有限位块,所述限位块与移动块之间通过转动板转动连接,所述限位块远离转动板的一侧外壁固定连接有抓手。
5.进一步地,所述移动块上开设有倾斜槽,所述倾斜槽内部固定连接有转动柱,所述限位块远离抓手的一端固定连接有辅助转动柱,其中,所述转动板的两端分别转动套设在辅助转动柱与转动柱的外表面。
6.进一步地,所述抓手远离限位块的一端固定连接有夹持板,所述夹持板远离抓手的一侧外壁固定连接有若干个半圆摩擦柱,其中,所述夹持板呈弧形设置,所述半圆摩擦柱的外表面呈粗糙面。
7.进一步地,所述抓手的内部开设有气体腔,所述夹持板的内部开设有气压腔,且气体腔与气压腔连通设置。
8.进一步地,所述半圆摩擦柱的内部开设有辅助腔,所述夹持板的侧壁开设有若干个流通槽,若干个所述流通槽分别正对着若干个辅助腔设置,所述流通槽与辅助腔连通设置。
9.进一步地,所述抓手的顶部外壁固定连接有活塞管,所述活塞管的底侧外壁开设
有气体孔,所述气体孔与气体腔连通设置。
10.进一步地,所述活塞管的内部滑动设置有活塞盘,所述活塞盘的外壁与活塞管的内壁接触设置,所述活塞盘的顶部外壁固定连接有活塞拉杆,所述活塞拉杆远离活塞盘的一端滑动贯穿活塞管的顶部外壁并延伸至外侧,且其延伸部与辅助板的侧壁固定连接。
11.进一步地,所述半圆摩擦柱的底侧外壁分别固定连接有若干个吸盘,若干个所述吸盘与辅助腔连通设置。
12.与现有技术相比,本发明的有益效果是:(1)、该工业机器人用机械抓取装置,工作人员可以将该装置通过连接柱和轴承活动设置在工业机器人上,当需要对物料进行抓取时,工作人员可以启动电动推杆,可以推动移动块在滑杆上移动,可以使转动板发生转动,可以使抓手在限位块的作用下延伸限位杆上下移动,从而实现对物料的抓取效果。
13.(2)、该工业机器人用机械抓取装置,通过该装置的设置,通过在抓手上设置夹持板,且夹持板呈弧形状态,这样在对圆形物料进行抓取时,可以使夹持板始终与圆形物料表面接触,从而可以增大该装置与圆形物料之间的接触面积,从而增强了抓取效果,增强了该装置的稳定性,防止在抓取过程中,圆形物料滑脱。
14.(3)、该工业机器人用机械抓取装置,通过在夹持板的夹持面设置有若干个半圆摩擦柱,且其外壁为摩擦面,这样就使得在抓取物料时,该装置与圆形物料的接触面为摩擦面,进而可以增大该装置与圆形物料之间的摩擦力,进而进一步增强了该装置对物料的抓取效果,使得圆形物料在抓取时更加稳定。
15.(4)、该工业机器人用机械抓取装置,当抓手在对物料进行抓取时,抓手的相互靠近,可以使活塞拉杆拉动活塞盘沿着活塞管的内部发生移动,进而可以对气体腔和气压腔内部的气体进行抽拉,以此可以使吸盘与物料外壁接触部呈现出负压状态,以此可以增大该装置在抓取时对物料的夹持吸附力度,从而进一步增强了该装置对物料抓取时的稳定性。
附图说明
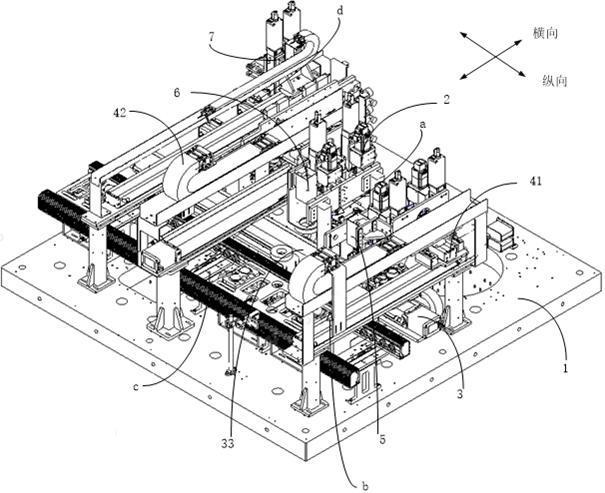
16.图1为本发明整体结构示意图;图2为本发明移动块整体结构示意图;图3为本发明图2中a的放大图;图4为本发明抓手整体结构示意图;图5为本发明辅助板整体结构示意图;图6为本发明抓手整体结构立体剖视图;图7为本发明图6中b的放大图;图8为本发明半圆摩擦柱整体结构示意图。
17.图中:1、连接座;11、连接柱;12、轴承;13、连接盘;2、固定柱;21、滑槽;22、滑杆;23、移动块;24、电动推杆;3、辅助板;31、限位槽;32、限位杆;33、限位块;34、转动板;35、抓手;4、倾斜槽;41、转动柱;42、辅助转动柱;5、夹持板;51、半圆摩擦柱;6、气体腔;61、气压腔;62、辅助腔;63、流通槽;7、活塞管;71、气体孔;8、活塞盘;81、活塞拉杆;9、吸盘。
具体实施方式
18.下面结合附图和具体实施方式对本发明作进一步详细的说明。本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
19.实施例1请参阅图1-图4所示,本发明为一种工业机器人用机械抓取装置,包括:连接座1,连接座1上设置有连接柱11,这样设置的目的是为了便于固定连接整体装置,连接柱11的两端分别贯穿连接座1的两侧外壁并延伸至外侧,这样设置的目的是为了便于连接柱11的限位,连接柱11的延伸部外表面套设有轴承12,这样设置的目的是为了便于连接柱11的固定,连接柱11与连接座1通过轴承12活动连接,这样设置的目的是为了便于该装置的拆卸,连接座1的正面外壁中轴处固定连接有连接盘13,这样设置的目的是为了便于辅助设置固定柱2;固定柱2,固定柱2固定连接在连接盘13远离连接座1的一侧外壁,这样设置的目的是为了便于固定固定柱2,固定柱2外壁上开设有若干个滑槽21,这样设置的目的是为了便于辅助设置滑杆22,滑槽21的内部固定连接有滑杆22,这样设置的目的是为了便于辅助设置移动块23,滑杆22外壁上滑动套设有移动块23,这样设置的目的是为了便于移动块23的移动,移动块23的侧壁固定连接有电动推杆24,这样设置的目的是为了便于推动移动块23移动,电动推杆24远离移动块23的一端与连接盘13的侧壁固定连接,这样设置的目的是为了便于固定电动推杆24;辅助板3,辅助板3的数量为四个,这样设置的目的是为了便于对辅助板3的数量进行限定,四个辅助板3分别固定连接在固定柱2远离连接盘13的一端外壁,这样设置的目的是为了便于固定辅助板3,辅助板3上开设有限位槽31,这样设置的目的是为了便于辅助设置限位杆32,限位槽31内部中轴处固定连接有限位杆32,这样设置的目的是为了便于对限位块33进行限位,限位杆32上滑动设置有限位块33,这样设置的目的是为了便于限位块33的移动,限位块33与移动块23之间通过转动板34转动连接,这样设置的目的是为了便于限位块33的移动,限位块33远离转动板34的一侧外壁固定连接有抓手35,这样设置的目的是为了便于抓取。
20.移动块23上开设有倾斜槽4,这样设置的目的是为了便于辅助设置转动柱41,倾斜槽4内部固定连接有转动柱41,这样设置的目的是为了便于对转动板34进行限位,限位块33远离抓手35的一端固定连接有辅助转动柱42,这样设置的目的是为了便于转动板34的转动;其中,转动板34的两端分别转动套设在辅助转动柱42与转动柱41的外表面,这样设置的目的是为了便于对转动板34进行转动。
21.实施例2与实施例1的区别特征,如图1-图8所示抓手35远离限位块33的一端固定连接有夹持板5,这样设置的目的是为了便于夹
持,夹持板5远离抓手35的一侧外壁固定连接有若干个半圆摩擦柱51,这样设置的目的是为了便于增大摩擦力;其中,夹持板5呈弧形设置,这样设置的目的是为了便于对夹持板5进行限位,半圆摩擦柱51的外表面呈粗糙面,这样设置的目的是为了便于增大摩擦力。
22.抓手35的内部开设有气体腔6,这样设置的目的是为了便于储存气体,夹持板5的内部开设有气压腔61,这样设置的目的是为了便于气体的流动,且气体腔6与气压腔61连通设置,这样设置的目的是为了便于气体的进入。
23.半圆摩擦柱51的内部开设有辅助腔62,这样设置的目的是为了便于气体的流通,夹持板5的侧壁开设有若干个流通槽63,这样设置的目的是为了便于气体的传输,若干个流通槽63分别正对着若干个辅助腔62设置,这样设置的目的是为了便于对流通槽63进行限位,流通槽63与辅助腔62连通设置,这样设置的目的是为了便于气体的进入。
24.抓手35的顶部外壁固定连接有活塞管7,这样设置的目的是为了便于对气体进行抽拉,活塞管7的底侧外壁开设有气体孔71,这样设置的目的是为了便于气体的进入,气体孔71与气体腔6连通设置,这样设置的目的是为了便于气体的流动。
25.活塞管7的内部滑动设置有活塞盘8,这样设置的目的是为了便于对气体进行抽拉,活塞盘8的外壁与活塞管7的内壁接触设置,这样设置的目的是为了便于对活塞盘8进行限位,活塞盘8的顶部外壁固定连接有活塞拉杆81,这样设置的目的是为了便于拉动活塞盘8,活塞拉杆81远离活塞盘8的一端滑动贯穿活塞管7的顶部外壁并延伸至外侧,这样设置的目的是为了便于活塞拉杆81的移动,且其延伸部与辅助板3的侧壁固定连接,这样设置的目的是为了便于固定活塞拉杆81。
26.半圆摩擦柱51的底侧外壁分别固定连接有若干个吸盘9,这样设置的目的是为了便于增大抓取时的吸力,若干个吸盘9与辅助腔62连通设置,这样设置的目的是为了便于在抓取时产生负压。
27.本实施例的一个具体应用为:工作人员可以将该装置通过连接柱11和轴承12活动设置在工业机器人上,当需要对物料进行抓取时,工作人员可以启动电动推杆24,可以推动移动块23在滑杆22上移动,可以使转动板34发生转动,可以使抓手35在限位块33的作用下延伸限位杆32上下移动,从而实现对物料的抓取效果,其次,通过该装置的设置,通过在抓手35上设置夹持板5,且夹持板5呈弧形状态,这样在对圆形物料进行抓取时,可以使夹持板5始终与圆形物料表面接触,从而可以增大该装置与圆形物料之间的接触面积,从而增强了抓取效果,增强了该装置的稳定性,防止在抓取过程中,圆形物料滑脱。
28.同时,通过在夹持板5的夹持面设置有若干个半圆摩擦柱51,且其外壁为摩擦面,这样就使得在抓取物料时,该装置与圆形物料的接触面为摩擦面,进而可以增大该装置与圆形物料之间的摩擦力,进而进一步增强了该装置对物料的抓取效果,使得圆形物料在抓取时更加稳定,其次,当抓手35在对物料进行抓取时,抓手35的相互靠近,可以使活塞拉杆81拉动活塞盘8沿着活塞管7的内部发生移动,进而可以对气体腔6和气压腔61内部的气体进行抽拉,以此可以使吸盘9与物料外壁接触部呈现出负压状态,以此可以增大该装置在抓取时对物料的夹持吸附力度,从而进一步增强了该装置对物料抓取时的稳定性。
29.显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域及相关领域的普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。本发明中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。