1.示例性实施例总体上涉及手动工具技术,并且具体地涉及可调夹钳技术。
背景技术:
2.夹钳已被证明是用于在各种情况下抓握紧固件、配件等的有效工具。然而,由于紧固件和配件的尺寸变化很多,因此产生了对夹钳的可调节性的需要。通过引入可调夹钳来满足这种需要,该夹钳允许夹钳的手柄构件相对于彼此滑动,以增加夹钳的夹爪之间的间距,从而允许夹持宽范围的紧固件或配件尺寸。尽管可调夹钳满足了不需要许多不同尺寸的夹钳来完成各种任务的需要,但是传统可调夹钳的适应性仍然在许多方面受到限制。因此,需要在可调夹钳领域进行持续的创新,以进一步提高夹钳在各种应用中的适应性和有效性。
技术实现要素:
3.根据一些示例性实施例,提供了一种双模式夹钳。在这方面,双模式夹钳可包括第一手柄构件、第二手柄构件和通道,第一手柄构件包括第一手柄和第一夹爪,第二手柄构件包括第二手柄和第二夹爪,通道在第一手柄和第一夹爪之间设置在第一手柄构件中。该双模式夹钳还可包括可调枢轴,该枢轴固定到第二手柄构件,并设置在第一手柄构件的通道内。第二手柄构件可被配置成相对于第一手柄构件围绕由可调枢轴限定的枢转轴线枢转。双模式夹钳还可包括在接合位置和脱离位置之间可移动的模式选择器构件。在接合位置,模式选择器构件与第一手柄构件和第二手柄构件两者接合,并且当第二手柄朝向第一手柄移动时,可调枢轴使枢转轴线在通道内移动,以使第二夹爪朝向第一夹爪滑动。在脱离位置,模式选择器构件不与第一手柄构件和第二手柄构件两者接合,并且当第二手柄朝向第一手柄移动时,可调枢轴保持枢转轴线在通道内的位置。
4.根据一些示例性实施方式,提供了一种被配置成在单手自动调节模式和手动调节模式之间转换的可调夹钳。可调夹钳可包括第一手柄构件、第二手柄构件、通道以及可调枢轴,第一手柄构件包括第一手柄和第一夹爪,第二手柄构件包括第二手柄和第二夹爪,通道在第一手柄和第一夹爪之间设置在第一手柄构件中,可调枢轴固定到第二手柄构件上且设置在通道内。第二手柄构件可被配置成相对于第一手柄构件围绕由可调枢轴限定的枢转轴线枢转。可调夹钳还可包括模式选择器构件,其在可调枢轴和第二手柄之间固定到第二手柄构件。模式选择器构件在接合位置和脱离位置之间可旋转,在接合位置,模式选择器构件与第一手柄构件接触,在脱离位置,模式选择器构件不与第一手柄构件接触。在接合位置中,当第一手柄朝向第二手柄移动时,可调枢轴使枢转轴线在通道内移动,以使第二夹爪朝向第一夹爪滑动。在脱离位置,当第一手柄朝向第二手柄移动时,可调枢轴保持枢转轴线在通道内的位置。
附图说明
5.在已经概括地描述了一些示例性实施例之后,现在将参考附图,附图不一定按比例绘制,并且其中:
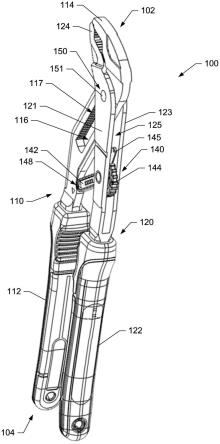
6.图1示出了根据一些示例性实施例的处于打开位置的示例性夹钳的侧视图,其中模式选择器构件处于接合位置;
7.图2示出了根据一些示例性实施例的处于闭合位置的示例性夹钳的侧视图,其中模式选择器构件处于接合位置;
8.图3示出了根据一些示例性实施例的处于闭合位置的示例性夹钳的立体俯视图,其中模式选择器构件处于接合位置;
9.图4示出了根据一些示例性实施例的处于闭合位置的示例性夹钳的横截面侧视图,其中模式选择器构件处于接合位置;
10.图5示出了根据一些示例性实施方式的图4的示例性夹钳的模式选择器构件的侧视放大图;
11.图6示出了根据一些示例性实施方式的图4的示例性夹钳的棘爪和通道的侧视放大图;
12.图7示出了根据一些示例性实施例的处于闭合位置的示例性夹钳的侧视图,其中模式选择器构件处于脱离位置;
13.图8示出了根据一些示例性实施例的处于打开位置的示例性夹钳的侧视图,其中模式选择器构件处于脱离位置;以及
14.图9示出了根据一些示例性实施例的具有另一示例性模式选择器构件的示例性夹钳的横截面侧视图。
具体实施方式
15.现在将在下文中参考附图更全面地描述一些示例性实施例,在附图中示出了一些但不是所有示例性实施例。实际上,本文描述和描绘的示例不应解释为限制本公开的范围、适用性或配置。相反,提供这些示例性实施例是为了使本公开满足适用的法律要求。相同的附图标记始终表示相同的元件。此外,如本文所使用的,术语“或”应解释为每当其操作数中的一个或多个为真时就结果为真的逻辑运算符。如本文所使用的,可操作联接应该理解为涉及直接或间接连接,在任一情况下,该直接或间接连接使得能够实现可操作地彼此联接的部件的功能性互连。如本文所使用的,可操作联接应该理解为涉及直接或间接连接,在任一情况下,该直接或间接连接使得能够实现可操作地彼此联接的部件的功能性互连。
16.本文所述的各种示例性实施方式涉及双模式可调夹钳。这种夹钳可被配置成在第一模式下作为可调夹钳操作,一旦枢轴位置被设定成用于期望的夹爪距离,夹钳就继续在该位置操作,直到用户将枢轴位置重新设定到不同位置。在第二模式中,示例性夹钳可以作为自动调节夹钳操作,由此,当用户使夹钳的手柄朝向彼此移动时,夹钳的夹爪自动地朝向彼此滑动,直到例如夹爪在紧固件上闭合。在使用示例性夹钳时在这些模式之间转换的能力为各种应用增加了显著的灵活性和效率。
17.例如,在用户需要作用于多个相同尺寸的紧固件的情况下,这是常见的情况,用户可以首先将示例性夹钳置于自动调节模式。在该模式中,用户可将示例性夹钳应用于第一
紧固件。因为示例性夹钳处于自动调节模式,示例性夹钳的夹爪可一起滑动并自动向下调节到紧固件上,以针对紧固件的尺寸将夹爪调节到最佳间距。然后,用户可以将示例性夹钳从自动调节模式转换到手动调节模式,这将保持示例性夹钳的夹爪的间距。然后,用户可以操作第一紧固件,例如,以在期望的方向上转动紧固件(例如,拧紧或拧松)。在操作第一紧固件之后,用户可从第一紧固件移除示例性夹钳以将示例性夹钳移动至第二紧固件。因为示例性夹钳处于手动调节模式(而不是自动调节模式),所以即使手柄移动到闭合位置(手柄朝向彼此移动)并且夹爪不与紧固件接合,夹爪的相对间距也将被保持。这样,用户可以将示例性夹钳直接移动到第二紧固件,而不用考虑夹爪已经改变间距,因为夹钳不再处于自动调节模式。此后,可以在保持夹爪之间的间距的情况下继续接合相同尺寸的附加紧固件。
18.这样,根据一些示例性实施方式,示例性夹钳可提供用于选择性地接合或脱离自动调节模式。此外,示例性夹钳可由用户控制,以经由模式选择器构件的致动在自动调节模式和手动调节模式之间转换。在自动调节模式中,模式选择器构件可以定位成使得模式选择器构件处于接合位置,其中模式选择器构件与示例性夹钳的两个手柄构件都接触。在接合位置,可以在手柄构件之间提供两个接合点,即,由夹钳的可调枢轴限定的枢转轴线和经由模式选择器构件的接合。这样,当模式选择器构件处于接合位置时,示例性夹钳可自动调节可调枢轴的位置和夹爪之间的距离,如下面进一步描述的。
19.模式选择器构件还可以定位在脱离位置,在该脱离位置,模式选择器构件不与示例性夹钳的两个手柄构件接合或接触。在脱离位置,示例性夹钳可以以手动调节模式操作。在手动调节模式中,当示例性夹钳的手柄朝向彼此移动时,可调枢轴和相关联的枢转轴线可保持当前位置,从而保持夹爪之间的当前距离。为了改变可调枢轴的位置,手柄可以彼此远离地移动到调节分离位置,在该调节分离位置处,允许可调枢轴通过用户的手的推动而滑动,以增加或减小夹爪之间的距离。根据一些示例性实施例,在增加夹爪之间的距离的方向上移动可调枢轴和枢转轴线可仅在手动调节模式中执行。
20.已经概括地描述了示例性实施例的一些方面,现在参照图1,其示出了根据一些示例性实施例的双模式可调夹钳100的示例性实施例。夹钳100可限定前端102和后端104。关于结构,夹钳100可包括第一手柄构件110、第二手柄构件120和可调枢轴150。
21.第一手柄构件110可以是包括第一手柄112和第一夹爪114的细长构件。第一手柄112可以设置在第一手柄构件110的后端,并且可以包括可以形成第一手柄112的向后延伸部分,或者第一手柄112可以附接到向后延伸部分。例如,第一手柄112可以包括可以固定到第一手柄构件110的向后延伸部分的抓握部(例如,橡胶化抓握部)。第一夹爪114可设置在第一手柄构件110的前端处。第一夹爪114可被配置成能够在至少一侧上接合紧固件、配件等。在这方面,第一夹爪114可包括示例性特征,诸如夹持齿和凹口,其被配置成夹持紧固件、配件等或促进与紧固件、配件等的无滑动接合或减少的滑动接合。
22.第二手柄构件120可以是包括第二手柄122和第二夹爪124的细长构件。第二手柄122可设置在第二手柄构件120的后端,并且可包括可形成第二手柄122的向后延伸部分,或者第二手柄122可附接到该延伸部分。例如,第二手柄122可包括可固定到第二手柄构件120的向后延伸部分的抓握部(例如,橡胶化抓握部)。第二夹爪124可以设置在第二手柄构件120的前端处。第二夹爪124可被配置成在至少一侧上接合紧固件、配件等。在这方面,第二
夹爪124可包括示例性特征,诸如夹持齿和凹口,其被配置成夹持紧固件、配件等或促进与紧固件、配件等的无滑动接合或减少的滑动接合。
23.第一手柄构件110还可包括通道116。通道116可以形成为第一手柄构件110中的开口,并且可以沿着第一手柄构件110的长度在第一手柄112和第一夹爪114之间延伸。根据一些示例性实施例,通道116可包括设置在通道116的侧边缘上的通道齿117,其可被配置成允许可调枢轴150的棘齿运动,如下文进一步描述的。
24.可调枢轴150可通过销151在第二夹爪124与第二手柄122之间的位置处固定到第二手柄构件120。如下面参照图4-6进一步描述的,可调枢轴150可限定枢轴位置196,第一手柄构件110可相对于第二手柄构件120绕该枢轴位置枢转。此外,可调枢轴150可设置在通道116内,并且第一手柄构件110可通过设置在通道116内的可调枢轴150而联接到第二手柄122。可调枢轴150可被配置成以滑动方式在通道116内移动。可调枢轴150和相关枢轴位置196在通道116内的移动可允许夹钳100的可调节性。当可调枢轴150在通道116内向前移动时,第一夹爪114向第二夹爪124移动,从而减小夹钳100的夹爪间距。而且,当可调枢轴150在通道116中向后移动时,第一夹爪114远离第二夹爪124移动,从而增大夹钳100的夹爪间距。
25.夹钳100还可包括模式选择器构件140。根据一些示例性实施例,模式选择器构件140可以例如在可调枢轴150和第二手柄122之间的位置处固定到第二手柄构件120。模式选择器构件140可以例如经由穿过模式选择器构件140和第二手柄构件120的销141固定到第二手柄构件120。在这方面,销141可允许模式选择器构件140围绕销141并相对于第二手柄构件120旋转。模式选择器构件140可以包括主体部分144,其例如包括开口以接收销141。根据一些示例性实施例,主体部分144还可以包括用户抓握特征,其促进用户旋转模式选择器构件140的能力。在图1所示的示例性实施例中,用户抓握特征是在主体部分144的弯曲边缘上的一系列凹口,其延伸超出第二手柄构件120的边缘,以允许用户使用手指(例如拇指)来旋转模式选择器构件140。根据一些示例性实施例,模式选择器构件140还可以包括臂142。
26.根据一些示例性实施例,模式选择器构件140可以在也称为接合位置的第一位置和称为脱离位置的第二位置之间旋转。在接合位置,臂142朝向第一手柄构件110旋转,使得如果第二手柄122朝向第一手柄112移动(即,沿箭头198的方向),则第一手柄构件110可以与臂142的末端146接触。在接合位置,可以是圆形(例如,凸形)的尖端146可以与第一手柄构件110中的对应接合凹口118接合。根据一些示例性实施例,接合凹口118可以是圆形的(例如,凹形)以接收臂142的尖端126。可替代地,在脱离位置,臂142可以旋转远离第一手柄构件110,使得当第二手柄122朝向第一手柄112移动时,模式选择器构件140的臂142不与第一手柄构件110接合,如下面关于图7和8进一步描述的。
27.关于夹钳100的操作,图1示出了处于接合位置的模式选择器构件140和基本上间隔开的夹爪124和114。因为模式选择器构件140处于接合位置,所以可以执行自动调节模式操作。当用户在手柄112和122上施加力以使第二手柄122沿方向198朝向第一手柄112移动时,可调枢轴150可由于多支点枢转动作而被推动以在通道116中向前滑动。在这方面,当第二手柄122朝向第一手柄112移动时,模式选择器构件140的臂142的末端146可在凹口118内旋转,第二手柄构件120可绕销141沿方向190旋转,并且第二手柄构件120可绕枢轴位置196相对于第一手柄构件110旋转。结果,可调枢轴150可在通道116内沿方向192移动(例如,通
过如下所述的进行棘齿作用),并且第二夹爪124可沿方向194朝向第一夹爪114移动。这样,第二夹爪124朝第一夹爪114自动调节,直到夹爪114和124相遇,或者夹爪114和124夹紧在定位在夹爪114和124之间的紧固件、配件等上。如图2所示,第二手柄122已经朝向第一手柄112移动,直到第二夹爪124自动调节以与第一夹爪114相遇。同样如图2所示,相对于图1所示的夹钳100的部件的定位,第二夹爪124已经自动调整,并且臂142的末端146已经在凹口118中枢转,第二手柄构件120已经围绕销141旋转,并且第二手柄构件120已经围绕枢轴位置196相对于第一手柄构件110旋转。
28.参照图3,以俯视立体图示出了夹钳100。如图3所示,根据一些示例性实施例,第二手柄构件120可包括由侧构件121和123形成的开口125。侧构件121和123可被固定在第二手柄122和第二夹爪124之间。根据一些示例性实施例,模式选择器构件140可以在开口125内固定到第二手柄构件120。此外,模式选择器构件140的臂142可以被配置成当模式选择器构件140处于脱离位置时旋转到开口125中,使得臂142设置在侧构件121和123之间。另外,如图3所示,根据一些示例性实施例,第一手柄构件110的第一夹爪114部分也可穿过开口125,并且通过可调枢轴150和可调枢轴150的销151固定到第二手柄构件120。
29.考虑到图3提供的立体图,图4示出了夹钳100的横截面侧视图,使得侧构件121被移除并且设置在开口125中的部件可见。在这方面,图4示出了模式选择器构件140的完整侧视图。因此,夹钳100还可包括与第二手柄构件120和模式选择器构件140联接的弹簧145。弹簧145可以是扭簧,其可以经由弹簧145的第一端处的突起147联接到第二手柄构件120。弹簧145的第二端可以与模式选择器部件140的主体部分144上的凹入表面149接合,并且当模式选择器部件140旋转时允许其沿着凹入表面149滑动。在操作中,弹簧145通过与第二手柄构件120和模式选择器构件140的联接,可操作以通过要求用户在位置之间移动时克服最大弹簧力而将模式选择器构件140保持在接合位置或脱离位置。这样,由于弹簧145施加的偏压,模式选择器构件140在不被用户有意地推动到另一位置的情况下将倾向于保持在接合位置或脱离位置。
30.参照图4,并且更详细地参照图5,可以看到模式选择器构件140和第一紧固构件150之间的接合。在这方面,接合凹口118被示出为包括接收模式选择器构件140的臂142的尖端146的凹形弯曲部分。根据一些示例性实施例,尖端146被示出为包括凸形弯曲面,该凸形弯曲面对应于接合凹口118的凹形弯曲部分。另外,接合凹口118的后侧可以升高,以确保在自动调节模式操作期间,当尖端146在接合凹口118内枢转或旋转时,尖端146保持坐落在接合凹口118中,如上所述。
31.此外,图4的横截面图还示出了可调枢轴150的附加特征。在这方面,参考图4以及图6中提供的放大视图,可调枢轴150可包括棘爪152。在这方面,棘爪152可以包括棘爪齿154和棘爪杆156。棘爪齿154可被配置成与通道齿117交接或接合,以促进夹钳100的可调节性特征。夹钳100还可包括弹簧157,其促使棘爪齿154与通道齿117接合。在这方面,如图6中最佳示出的,棘爪152可以比通道116的宽度窄,这可以允许棘爪152在通道116内围绕销151枢转。在没有其它外力的情况下,弹簧157可以迫使棘爪152进入棘爪齿154与通道齿117接合的位置,并且棘爪152在通道116内处于枢轴位置,因为由弹簧157施加的力偏离销151。
32.棘爪齿154可以成形为接合由通道齿117形成的沟槽。此外,棘爪齿154和通道齿117中的任一个或两者可以成形为允许棘爪152在向前方向上进行进行棘齿运动(棘爪一起
滑动)并且当棘爪齿154与通道齿117接合时防止棘爪152在向后方向上移动。在这方面,例如,通道齿117的后面可以相对于通道齿117的前面的陡峭或者甚至负坡度具有平缓的坡度(小的正坡度)。棘爪齿154可以以相应的方式成形,使得棘爪齿154的后面具有陡峭或甚至负坡度,并且棘爪齿154的前面具有相对平缓的坡度(小的正坡度)。通道齿117的后面和棘爪齿154的前面的平缓或小的正坡度可以允许棘爪齿154骑在通道齿117的后面上(同时棘爪152抵抗弹簧157的推动而枢转并且压缩弹簧157),以允许在自动调节模式操作期间当棘爪152在通道116内沿向前方向移动时在通道齿117上进行棘齿运动。
33.另外,由于通道齿117和棘爪齿154的前表面的陡峭或负坡度,棘爪152以及因此枢轴位置196可保持在通道116中的当前位置。这样,当模式选择器构件140移动到脱离位置时,手柄112和122可以一起移动以闭合夹爪114和124,而不发生自动调节动作。
34.在这方面,图7示出了夹钳100的侧视图,其中模式选择器构件140处于脱离位置,并且夹爪114和124闭合。另外,如图7所示,模式选择器构件140的臂142隐藏在开口125内的侧边缘121后面。然而,模式选择器部件140的主体部分144的用户抓握特征可以延伸出开口125,以促进用户能够旋转用户抓握特征,从而克服弹簧145的偏压将模式选择器部件140和臂142旋转出脱离位置并进入接合位置。
35.现在将描述根据一些示例性实施例的调节夹爪114和124以增大夹爪114和124之间的间距的操作。在这方面,参照图8,第二手柄122可沿方向199远离第一手柄112移动,以使第二手柄构件120相对于第一手柄构件110绕枢轴位置196枢转。再次参见图6,当第一手柄构件110相对于第二手柄构件120围绕枢轴位置196旋转时,由于与通道齿117和弹簧157的接合,棘爪152与第一手柄构件110一起旋转。当该旋转继续时,固定到第二手柄构件120的销158响应性地朝向棘爪杆156移动,直到销158与棘爪杆156接触。如果在进行这种接触之后继续旋转,则销158将在棘爪杆156上施加力,以使棘爪152抵抗弹簧157的推动而在通道116内枢转。当棘爪152枢转时(参照图6沿逆时针方向),棘爪齿154将被拉动而脱离与通道齿117的接合。由于棘爪齿154不再与通道齿117接合,具有棘爪152的可调枢轴150和枢轴位置196可以在图8的向后方向193上(以及在向前方向上)滑动。滑动运动可以是双手操作,这需要第一只手抓住第一手柄112,第二只手抓住第二手柄122,并且通过第二手柄122使第二手柄构件120例如沿向后方向滑动。因此,由于第二手柄构件120和可调枢轴150的滑动运动,第二夹爪124也可沿方向195运动。当第二手柄122随后朝向第一手柄112移动时,销153可与棘爪杠杆156脱离接合,并且棘爪齿154可与通道齿117重新接合,从而防止可调枢轴150和棘爪152在向后方向上进一步移动。
36.根据一些示例性实施例,图9示出了夹钳101形式的另一示例性实施例。除了模式选择器构件240和模式选择器构件240与第一手柄构件110之间的接合之外,夹钳101可以类似于夹钳100。
37.在这方面,图9是夹钳101的横截面侧视图,其中侧构件121被移除。在这方面,夹钳101可包括模式选择器构件240,其可围绕销241在接合位置和脱离位置之间旋转。模式选择器构件240可以包括具有带齿尖端246的臂242。带齿尖端246可以包括一个或多个齿,所述齿被配置成与设置在第一手柄构件110的顶部边缘上的接合齿238交接或接合。夹钳101还可包括可用于双重目的弹簧245。在这方面,类似于弹簧145,弹簧245可以操作以将模式选择器构件240保持在接合位置或脱离位置,在接合位置,带齿尖端246与接合齿238接合以在
自动调节模式下操作,在脱离位置,带齿尖端246不与接合齿238接合以在手动调节模式下操作。然而,弹簧245还可以在处于接合位置的模式选择器构件240上施加偏压,以便于带齿尖端246在接合齿238上接合进行棘齿运动,从而执行自动调节操作。
38.因为可调枢轴150在夹钳101中的构造方式与在夹钳100中的相同,所以在手动调节模式中夹钳101的操作可以与上面提供的描述类似。这样,当模式选择器构件240处于脱离位置时,夹钳101的操作可以与夹钳100的操作相同。然而,关于自动调节模式,夹钳101可以类似地起作用,尽管以不同的方式起作用。
39.在这方面,在模式选择器构件240处于接合位置的情况下,带齿尖端246可以与接合齿238接合。当第二手柄122向第一手柄112移动时,在其上设置有接合齿238的倾斜边缘(平行于在其上设置有通道齿117的内部通道表面)操作,以使第二手柄构件120沿向前方向移动,从而也使可调枢轴150和枢轴位置196沿向前方向移动。当第二手柄构件120沿向前方向移动并以自动调节方式使第二夹爪124朝向第一夹爪114滑动时,模式选择器240在第一手柄构件110上施加力,同时在接合齿238上沿向前方向进行棘齿运动。在这方面,与夹钳100一起旋转的臂的尖端不同,带齿尖端在接合齿238上进行棘齿运动。
40.根据一些示例性实施例,提供了一种双模式夹钳。在这方面,双模式夹钳可包括第一手柄构件、第二手柄构件和通道,第一手柄构件包括第一手柄和第一夹爪,第二手柄构件包括第二手柄和第二夹爪,通道在第一手柄和第一夹爪之间设置在第一手柄构件中。该双模式夹钳还可包括可调枢轴,该枢轴固定到第二手柄构件,并设置在第一手柄构件的通道内。第二手柄构件可被配置成相对于第一手柄构件围绕由可调枢轴限定的枢转轴线枢转。双模式夹钳还可包括在接合位置和脱离位置之间可移动的模式选择器构件。在接合位置,模式选择器构件与第一手柄构件和第二手柄构件两者接合,并且当第二手柄朝向第一手柄移动时,可调枢轴使枢转轴线在通道内移动,以使第二夹爪朝向第一夹爪滑动。在脱离位置,模式选择器构件不与第一手柄构件和第二手柄构件两者接合,并且当第二手柄朝向第一手柄移动时,可调枢轴保持枢转轴线在通道内的位置。
41.根据一些示例性实施例,可调枢轴可以在第二夹爪和第二手柄之间固定到第二手柄构件,并且模式选择器构件可以在可调枢轴和第二手柄之间固定到第二手柄构件。另外或替代地,根据一些示例性实施例,模式选择器构件可以被配置为在接合位置和脱离位置之间枢转。另外或替代地,根据一些示例性实施例,模式选择器构件可包括具有圆形端部的臂,并且第一手柄构件可包括接合凹口,该接合凹口被配置成当模式选择器构件处于接合位置时接收模式选择器构件的臂的圆形端部。另外或替代地,根据一些示例性实施例,当可调枢轴在通道内移动时,模式选择器构件的臂的圆形端部可在第一手柄构件的接合凹口内旋转。另外或替代地,根据一些实例实施例,可调枢轴可包括棘爪,且棘爪可包括棘爪齿。通道还可以包括通道齿,并且棘爪可以被弹簧偏压以迫使棘爪齿与通道齿接合。另外或替代地,根据一些示例性实施例,棘爪还可以包括从棘爪延伸的棘爪杆。第二手柄构件还可包括销,并且当第一手柄远离第二手柄移动时,棘爪杆可朝向销移动,直到棘爪杆与销接合,使得第一手柄远离第二手柄的继续移动导致棘爪齿与通道齿脱离。另外或替代地,根据一些示例性实施例,在接合位置中,当第一手柄朝向第二手柄移动时,随着枢转轴线在通道内移动,棘爪齿在通道齿上进行棘齿运动,使第二夹爪朝向第一夹爪滑动。另外或替代地,根据一些示例性实施例,模式选择器构件可包括臂,该臂具有设置在该臂的端部处的选择器齿,
并且第一手柄构件可包括设置在第一手柄构件的外边缘上的接合齿。此外,双模式夹钳还可包括联接到模式选择器构件和第二手柄构件的弹簧。弹簧可以被配置成迫使选择器齿与接合齿接合。另外或替代地,根据一些示例性实施例,在接合位置中,选择器齿可以与接合齿接合,并且当第二手柄朝向第一手柄移动时,选择器齿在接合齿上进行棘齿运动。
42.根据一些示例性实施方式,提供了一种配置成在自动调节模式和手动调节模式之间转换的可调夹钳。可调夹钳可包括第一手柄构件、第二手柄构件、通道以及可调枢轴,第一手柄构件包括第一手柄和第一夹爪,第二手柄构件包括第二手柄和第二夹爪,通道在第一手柄和第一夹爪之间设置在第一手柄构件中,可调枢轴固定到第二手柄构件上且设置在通道内。第二手柄构件可被配置成相对于第一手柄构件围绕由可调枢轴限定的枢转轴线枢转。可调夹钳还可包括模式选择器构件,其在可调枢轴和第二手柄之间固定到第二手柄构件。模式选择器构件在接合位置和脱离位置之间可旋转,在接合位置,模式选择器构件与第一手柄构件接触,在脱离位置,模式选择器构件不与第一手柄构件接触。在接合位置中,当第一手柄朝向第二手柄移动时,可调枢轴使枢转轴线在通道内移动,以使第二夹爪朝向第一夹爪滑动。在脱离位置,当第一手柄朝向第二手柄移动时,可调枢轴保持枢转轴线在通道内的位置。
43.另外,根据一些示例性实施方式,可调夹钳还可包括与模式选择器构件联接的模式选择器弹簧。模式选择器弹簧可以被配置为偏置选择器构件的旋转运动,以将模式选择器构件保持在当前位置。在这方面,当前位置可以是接合位置或脱离位置。另外或替代地,根据一些示例性实施例,模式选择器构件可包括具有圆形端部的臂,并且第一手柄构件可包括接合凹口,该接合凹口被配置成当模式选择器构件处于接合位置时接收模式选择器构件的臂的圆形端部。另外或替代地,根据一些示例性实施例,当可调枢轴在通道内移动时,模式选择器构件的臂的圆形端部可在第一手柄构件的接合凹口内旋转。另外或替代地,根据一些示例性实施例,可调枢轴在第二夹爪与可调枢轴之间固定到第二手柄构件。另外或替代地,根据一些实例实施例,可调枢轴可包括棘爪,且棘爪可包括棘爪齿。通道可以包括通道齿,并且棘爪可以被弹簧偏压以迫使棘爪齿与通道齿接合。另外或替代地,根据一些示例性实施例,棘爪还可以包括从棘爪延伸的棘爪杆。第二手柄构件还可包括销,并且当第一手柄远离第二手柄移动时,棘爪杆可朝向销移动,直到棘爪杆与销接合,使得第一手柄远离第二手柄的继续移动导致棘爪齿与通道齿脱离。另外或替代地,根据一些示例性实施例,在接合位置中,当第一手柄朝向第二手柄移动时,随着枢转轴线在通道内移动,棘爪齿可以在通道齿上进行棘齿运动,使第二夹爪朝向第一夹爪滑动。另外或替代地,根据一些示例性实施例,模式选择器构件可包括臂,该臂具有设置在该臂的端部处的选择器齿,并且第一手柄构件可包括设置在第一手柄构件的外边缘上的接合齿。可调夹钳还可包括联接到模式选择器构件和第二手柄构件的弹簧。弹簧可以被配置成迫使选择器齿与接合齿接合。另外或替代地,根据一些示例性实施例,在接合位置中,选择器齿可以与接合齿接合,并且当第二手柄朝向第一手柄移动时,选择器齿可以在接合齿上进行棘齿运动。
44.受益于在前述描述和相关附图中呈现的教导,本发明所属领域的技术人员将想到本文阐述的本发明的许多修改和其它实施方式。因此,应当理解,本发明不限于所公开的具体实施方式,并且修改和其它实施方式旨在包括在所附权利要求的范围内。此外,虽然前面的描述和相关联的附图在元件和/或功能的某些示例性组合的上下文中描述了示例性实施
方式,但是应当理解,在不脱离所附权利要求的范围的情况下,可以通过替代实施方式来提供元件和/或功能的不同组合。在这方面,例如,与上文明确描述的那些不同的元件和/或功能的组合也被预期为可以在所附权利要求中的一些中阐述。在本文描述了优点、益处或问题的解决方案的情况下,应当理解,这些优点、益处和/或解决方案可以适用于一些示例性实施方式,但不一定适用于所有示例性实施方式。因此,本文所述的任何优点、益处或解决方案不应被认为对所有实施方式或本文所要求保护的实施方式是关键的、必需的或必要的。尽管在此使用了特定术语,但是它们仅在一般性和描述性意义上使用,而不是为了限制的目的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。