1.本发明涉及数控车床工件装夹定位技术领域,特别涉及用于泵盖车加工的数控车床定位工装及泵盖定位方法。
背景技术:
2.随着我国泵业技术的快速发展,精车加工圆形泵盖零件的需求越来越大,加工质量及效率要求也越来越高,因此对泵盖加工的精度要求也越来越高;当前数控车床工件装夹定位方法如下:1.直接找正装夹法:用百分表、划针或者目测,把工件直接放在机床工作台上或放在卡盘、机用虎钳等机床附件中,根据工件的一个或几个表面用划针或指示表找正工件准确位置后再进行夹紧;先按加工要求进行加工面位置的划线工序,然后再按划出的线痕进行找正实现定位装夹。
3.2.振动盘定位装夹法:利用震动盘将无序的工件,有序规整的选出,随后通过机械手将工件进行装夹。
4.3.夹具装夹法:将工件装在夹具上,不再进行找正,便能直接得到准确加工位置的装夹方式。
5.但是对于泵盖侧裙有突起的圆形泵盖来说,如图11,第一种方法虽然可以进行定位,但是效率较低,费时费力;第二种方法只适用于规整、规则的工件,一但遇到泵盖侧裙有突起的圆形泵盖,震动盘无法选出;第三种方法虽然简便,并且装夹效率和加工精度均较高,但是,采用夹具进行装夹会产生两个问题:1.成本较高:由于待车泵盖规格很多,对于承接外包车加工业务的加工厂而言,则需要购买相对应的泵盖夹具,无疑会造成加工成本的升高,进而造成自身竞争力的下降;2.易出现高频次夹具更换:当某些批次泵盖零件数量均较少时,则需要频繁更换夹具,造成加工效率不高的问题。
6.因此,本发明提出了用于泵盖车加工的数控车床定位工装及泵盖定位方法,其可以对泵盖侧裙有突起的圆形泵盖进行准确的定位,并且可以适应不同规格的圆形泵盖,降低成本的同时,提升了生产效率。
技术实现要素:
7.本发明所使用的技术方案为:用于泵盖车加工的数控车床定位工装,包括:套管;所述套管内转动且滑动安装有调节杆,所述调节杆上固定连接有摩擦块;所述摩擦块上固定安装有齿圈,所述套管上设有与所述齿圈相配合的阻片,所述阻片上设有与所述齿圈相配合的齿,且所述齿圈上的齿与所述阻片上的齿相接触;所述套管上滑动安装有移动头,所述移动头一端与所述调节杆相抵,另一端滑动安装有连接杆,所述移动头与连接杆之间通过弹簧弹性连接;所述阻片转动安装在所述套管上,且其中一端与所述连接杆固定连接;所述套管上设有圆盘状突起,所述圆盘状突起一侧设有推力轴承;所述推力轴承
一侧与所述套管上的圆盘状突起相抵,另一侧通过二号弹簧与所述摩擦块弹性连接;所述摩擦块外表层为橡胶材料,且橡胶材料与摩擦块固定连接;橡胶材料表面的粗糙程度不小于三爪卡盘的三个爪尖端的粗糙程度。
8.进一步的,还包括:连接壳;所述连接壳套设在所述调节杆上,且与所述调节杆固定连接;所述连接壳外侧与所述摩擦块固定连接;所述推力轴承一侧与所述套管上的圆盘状突起顶部相抵,另一侧通过二号弹簧与所述连接壳弹性连接;进一步的,还包括:二号推力轴承;所述二号推力轴承一侧与所述套管上的圆盘状突起底部固定连接;所述连接壳上设有与所述二号推力轴承另一侧相配合的圆环。
9.进一步的,所述摩擦块上滑动安装有若干个小摩擦块;所述连接壳与所述调节杆螺纹连接;所述调节杆一端转动安装有顶块;每个所述小摩擦块上均设有与所述顶块相配合的斜面;所述调节杆另一端设有用于方便对其旋转的凹槽。
10.进一步的,所述调节杆与所述顶块之间通过三号推力轴承转动连接。
11.进一步的,所述移动头与所述调节杆相抵的一端设有斜面;所述调节杆上设有与所述移动头上的斜面相配合的圆台;所述移动头上固定安装有齿条;所述齿条上的齿为棘齿;所述套管上转动安装有与所述齿条上的棘齿相配合的拨片;所述拨片与所述套管之间通过扭簧弹性连接;所述拨片用于在扭簧的作用下卡住所述齿条,使其只可向外移动;所述套管上滑动安装有压杆,且所述压杆通过三号弹簧与所述套管弹性连接;所述连接壳用于挤压所述压杆,所述压杆用于在所述连接壳的作用下挤压拨片,使得拨片不再限制齿条。
12.进一步的,所述套管上固定安装有若干个位移传感器和色彩传感器;所述摩擦块与所述色彩传感器相对应的面上分为若干个扇形区域,每个扇形区域上均涂有颜色,且每个扇形区域的颜色均不相同;所述位移传感器用于检测其与所述摩擦块之间的距离;所述色彩传感器用于检测其对应的所述摩擦块上的扇形区域颜色是否发生变化。
13.进一步的,所述套管上设有避空,且标记有刻度线,所述刻度线位于所述避空一侧;所述调节杆上设有标记线;所述标记线和刻度线用于表示所述小摩擦块移动的距离。
14.用于泵盖车加工的数控车床泵盖定位方法,该方法包括如下步骤:s1.将套管固定安装在车床刀塔上;s2.将泵盖待加工端套设在摩擦块上;s3.手动旋动三爪卡盘,并使得三爪卡盘三个爪所形成的圆的直径略大于泵盖夹持处外侧的直径;s4.启动刀塔,使刀塔逐渐向三爪卡盘靠近;s5.当位移传感器所感应到的其与摩擦块之间的距离发生变化时,启动三爪卡盘,使其开始转动;s6.当位移传感器所感应到的其与摩擦块之间的距离达到预设值时,刀塔停止前进;
s7.当位移传感器所感应到的其与摩擦块之间的距离达到预设值,三爪卡盘停止旋转,并且刀塔停止前进;s8.当位移传感器所感应到的其与摩擦块之间的距离到达预设值,且刀塔前进的行程到达预设值、色彩传感器感应到的颜色不断发生变化,表明定位准确,此时手动旋紧三爪卡盘;反之,如果刀塔前进的行程没有到达预设值,或者色彩传感器感应到的颜色没有发生变化,则表明定位不准确,需重新操作。
15.进一步的,步骤s1之前旋动调节杆,使若干个小摩擦块外侧所形成的圆形直径略小于泵盖加工端内侧直径。
16.由于本发明采用了上述技术方案,本发明具有的有益效果为:本发明相较于传统的定位方法,可快速、高效、准确的对侧裙带有突起的圆形泵盖进行定位,使加工的精度得到提升;操作简便,只需将泵盖放到摩擦块上即可。
附图说明
17.图1-图2为本发明整体结构示意图。
18.图3为本发明整体结构示意图。
19.图4为本发明调节杆与阻片位置关系示意图。
20.图5为本发明图4中a处结构放大示意图。
21.图6为本发明套管整体结构示意图。
22.图7为本发明调节杆整体结构示意图。
23.图8为本发明调节杆与小摩擦块位置关系示意图。
24.图9为本发明连接壳整体结构示意图。
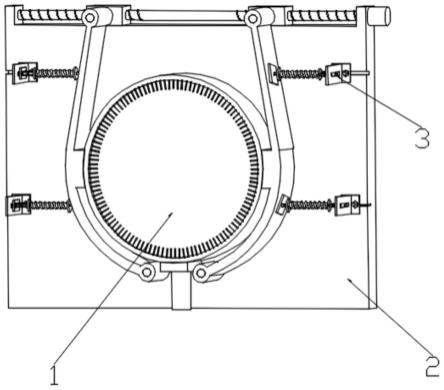
25.图10为本发明使用状态示意图。
26.图11为本发明背景技术中泵盖种类举例示意图。
27.附图标记:套管-1;调节杆-2;摩擦块-3;齿圈-4;阻片-5;移动头-6;连接杆-7;推力轴承-8;连接壳-9;二号推力轴承-10;小摩擦块-11;顶块-12;齿条-13;拨片-14;压杆-15。
具体实施方式
28.实施例,如图1-10所示,用于泵盖车加工的数控车床定位工装,包括:套管1;套管1内转动且滑动安装有调节杆2,调节杆2上固定连接有摩擦块3;摩擦块3上固定安装有齿圈4,套管1上设有与齿圈相配合的阻片5,阻片5上设有与齿圈4相配合的齿,且齿圈4上的齿与阻片5上的齿相接触;套管1上滑动安装有移动头6,移动头6一端与调节杆2相抵,另一端滑动安装有连接杆7,移动头6与连接杆7之间通过弹簧弹性连接;阻片5转动安装在套管1上,且其中一端与连接杆7固定连接;套管1上设有圆盘状突起,圆盘状突起一侧设有推力轴承8;推力轴承8一侧与套管1上的圆盘状突起相抵,另一侧通过二号弹簧与摩擦块3弹性连接;摩擦块3外表层为橡胶材料,且橡胶材料与摩擦块3固定连接;橡胶材料表面的粗糙程度不小于三爪卡盘的三个爪尖端的粗糙程度。
29.使用时,将套管1固定在刀塔上,然后将泵盖套在摩擦块3上,然后启动三爪卡盘,并且三个爪所形成圆直径略大于泵盖直径;随后启动刀塔,使得刀塔前进;在三爪卡盘接触到泵盖的侧裙时,三爪卡盘和泵盖之间产生摩擦力,此时二号弹簧是被压缩,并且三爪卡盘和泵盖之间、摩擦块3和泵盖之间均会产生摩擦力;由于三爪卡盘使在不停的转动的,因此在摩擦力的作用下,三爪卡盘有带动泵盖和摩擦块3转动的趋势;但是由于摩擦块3上固定安装有齿圈4,套管1上设有阻片5,因此阻片5会阻止摩擦块3进行转动;根据摩擦力公式,n为正压力,μ为动摩擦因数,其只与材料和接触面积的粗糙程度有关;由于在刀塔前进过程中,摩擦块3与泵盖之间的压力等于三爪卡盘与泵盖之间的压力,因此正压力n相等;并且由于摩擦块3外表层为橡胶材料,并且表面的粗糙程度不小于三爪卡盘的三个爪尖端的粗糙程度,因此摩擦块3与泵盖之间的摩擦系数大于三爪卡盘与泵盖之间的摩擦系数,也就是说摩擦块3与泵盖之间的摩擦力大于三爪卡盘与泵盖之间的摩擦力;因此,此时三爪卡盘转动时,不会带动泵盖转动;由于刀塔在不断的前进、二号弹簧处于压缩状态,并且三爪卡盘在转动,因此,当在三爪卡盘的转动过程中,泵盖侧裙上的突起卡入三爪卡盘的任意两个爪之间时,三爪卡盘与泵盖之间即不存在摩擦力,此时三爪卡盘即可带动泵盖和摩擦块3转动;在刀塔继续向前运动过程中,根据摩擦力公式,以及弹簧弹力公式,二号弹簧逐渐被压缩,形变量逐渐增加,以致正压力n逐渐增大,从而使得摩擦块3与泵盖之间的摩擦力逐渐增大,使得阻片5所产生的阻力不足以阻碍摩擦块3旋转,弹簧被反复压缩,即此时三爪卡盘转动时,三爪卡盘会带动泵盖和摩擦块3同时转动;在刀塔的前进过程中,位移传感器所检测到其与摩擦块3之间的距离越来越短,并且色彩传感器所检测到的颜色在不断变化,当位移传感器所检测的距离到达预设值时,刀塔停止前进,三爪卡盘抓紧泵盖,随后刀塔退出,完成定位。
30.具体的,如图3-5所示,本方案还包括:连接壳9、二号推力轴承10;连接壳9套设在调节杆2上,且与调节杆2通过螺纹固定连接;连接壳9外侧与摩擦块3通过螺纹固定连接;推力轴承8一侧与套管1上的圆盘状突起顶部相抵,另一侧通过二号弹簧与连接壳9弹性连接;二号推力轴承10一侧与套管1上的圆盘状突起底部固定连接;连接壳9上设有与二号推力轴承10另一侧相配合的圆环;摩擦块3上滑动安装有四个小摩擦块11;调节杆2与顶块12之间通过三号推力轴承转动连接;每个小摩擦块11上均设有与顶块12相配合的斜面;调节杆2另一端设有用于方便对其旋转的十字凹槽;移动头6与调节杆2相抵的一端设有斜面;调节杆2上设有环形避空,环形避空上设有与移动头6上的斜面相配合的圆台;移动头6上固定安装有齿条13;齿条13上的齿为棘齿;套管1上转动安装有与齿条13上的棘齿相配合的拨片14;拨片14与套管1之间通过扭簧弹性连接;拨片14用于在扭簧的作用下卡住齿条13,使其只可向外移动;
套管1上滑动安装有压杆15,且压杆15通过三号弹簧与套管1弹性连接;连接壳9用于挤压压杆15,压杆15用于在连接壳9的作用下挤压拨片14,使得拨片14不再限制齿条13;套管1上设有避空,且标记有刻度线,刻度线位于避空一侧;调节杆2上设有标记线;标记线和刻度线用于表示小摩擦块11移动的距离;当加工直径较大的泵盖时,在泵盖套设在摩擦块3之前,通过螺丝刀对准调节杆2上的十字凹槽,旋动调节杆2,使其向前端移动,在调节杆2向前移动的过程中,通过顶块12使得四个小摩擦块11向外移动,直至四个小摩擦块11所形成的圆直径略小于泵盖待加工端的内径,随后将泵盖套在摩擦块3上,可防止摩擦块3直径与泵盖待加工端内径相差过大,导致刀塔前进后,三爪卡盘无法加持,或者加持偏移过大;此外,在调节杆2向前移动中,调节杆2上的圆台挤压移动头6使得弹簧被压缩,从而使得摩擦块3转动的阻力增大;此外,由于泵盖直径增加,三爪卡盘与泵盖之间的摩擦力矩也会增加,摩擦力矩公式为:,l为从转动轴到力的矢量距离,f为矢量力,即三爪卡盘与泵盖之间的摩擦力,由于三爪卡盘与泵盖之间的摩擦力矩增加,因此三爪卡盘带动泵盖和摩擦块3进行旋转的趋势增加,因此,通过移动头6和弹簧,使得阻片5对摩擦块3的阻力增加,以此来保证泵盖侧裙上的突起没有卡入三爪卡盘的任意两爪之间时,三爪卡盘不会带动泵盖转动。
31.具体的,如图1-2所示,套管1上固定安装有两个位移传感器和一个色彩传感器;摩擦块3与色彩传感器相对应的面上分为多个扇形区域,每个扇形区域上均涂有颜色,且每个扇形区域的颜色均不相同;位移传感器用于检测其与摩擦块3之间的距离;色彩传感器用于检测其对应的摩擦块3上的扇形区域颜色是否发生变化。
32.工作原理、方法:使用时,首先根据泵盖待加工端的内径大小使用螺丝刀对准调节杆2后端的十字凹槽,使得调节杆2转动,同时根据调节杆2标记线与套管1上刻度线对应的数值,来使得四个小摩擦块11伸出摩擦块3,使得四个小摩擦块11所组成的圆的直径略小于泵盖待加工端的内径,随后将套管1固定安装在刀塔上,随后启动三爪卡盘,并使得三爪卡盘三个爪所形成的圆的直径略大于泵盖夹持处外侧的直径;然后启动刀塔,使刀塔逐渐向三爪卡盘靠近;在泵盖与三爪卡盘发生接触时,二号弹簧被压缩,通过二号弹簧吸收刀塔前进的行程,防止损坏车床,刀塔继续前进;此时位移传感器所感应到的其与摩擦块3之间的距离发生变化,启动三爪卡盘,使其开始转动,在三爪卡盘转动时,并且泵盖侧裙上的突起没有卡入三爪卡盘的任意两个爪之间时,三爪卡盘与泵盖之间存在摩擦力,并且泵盖和摩擦块3之间也存在摩擦力,三爪卡盘在转动的过程中存在驱动泵盖和摩擦块3转动的趋势,但是由于阻片5给摩擦块3的转动提供阻力,摩擦块3外表面为树脂材料,且表面粗糙程度不小于三爪卡盘的三个爪尖端的粗糙程度,因此当泵盖侧裙上的突起没有卡入三爪卡盘的任意两个爪时,三爪卡盘无法带动泵盖以及摩擦块3旋转,当泵盖侧裙上的突起卡入三爪卡盘的任意两个爪之间后,三爪卡盘带动泵盖进行转动,并且随着刀塔的前进,使得摩擦块3与泵盖之间的摩擦力逐渐增大,当阻片5提供的阻力不足以阻碍摩擦块3转动时,三爪卡盘带动泵盖和摩擦块3同时旋转,此时色彩传感器所检测到的颜色发生不断地改变;并且位移传感器所感应的距离不断缩小;当位移传感器所感应到的其与摩擦块之间的距离达到预设值时,刀塔停止前进;在位移传感器所感应到的其与摩擦块3之间的距离达到预设值时,如果刀塔前进
的行程达到预设值,并且色彩传感器所检测到的颜色不断发生改变时,表明泵盖定位准确;在位移传感器所感应到的其与摩擦块3之间的距离达到预设值时,但是刀塔前进的行程没有达到预设值,或者色彩传感器所述检测到的颜色没有发生改变,则表明泵盖定位出现偏差,需要重新进行定位。
33.在刀塔不断前进的过程中,连接壳9与压杆15之间距离不断缩小,并且在达到位移传感器的预设值时,连接壳9挤压压杆15,使得压杆15按压弄拨片14,从而使得拨片14不在限制齿条13,由于刀塔在前进的过程中,并且摩擦块3顶住泵盖后,调节杆2相对于套管1运动,运动方向为朝向刀塔方向,此时调节杆2不再限制移动头6,即阻片5阻碍摩擦块3转动的力减小;此过程可在泵盖完成定位后,减小阻片5与齿圈4之间摩擦产生的损耗,延长使用寿命。
34.本发明的实施方式只是作为例子提示的,不是要限定发明的范围。这些新的实施方式能够以其他各种各样的形态实施,在不脱离发明的主旨的范围内能够进行各种各样的省略、替换、变更。这些实施方式及其变形包含在发明的范围或主旨中,并且包含在权利要求书所记载的发明和其等价的范围中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。