技术特征:
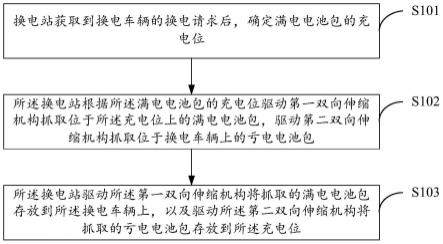
1.一种基于双伸缩机构的换电方法,其特征在于,包括:换电站获取到换电车辆的换电请求后,确定满电电池包的充电位;所述换电站根据所述满电电池包的充电位驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;所述换电站驱动所述第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第二双向伸缩机构将抓取的亏电电池包存放到所述充电位。2.根据权利要求1所述的换电方法,其特征在于,所述换电站包含:具有多个充电位的充电仓;用于第一双伸缩机构和第二双向伸缩机构沿轨道横向移动的换电仓;其中,所述换电仓中的轨道两端分别比所述充电仓多一个充电位的长度;或者所述充电仓的两端分别设有一个与充电位大小相同的空闲位,且所述充电仓与所述换电仓的长度相同。3.根据权利要求2所述的换电方法,其特征在于,所述换电站在确定满电电池包的充电位之后,还包括:换电站确定所述第一双伸缩机构和所述第二双伸缩机构的设置模式为分体模式还是合体模式;其中,所述分体模式是指所述第一双向伸缩机构设置在第一换电机器人上,所述第二双向伸缩机构设置在第二换电机器人上;所述合体模式是指所述第一双向伸缩机构和所述第二双向伸缩结构均设置在第三换电机器人上。4.根据权利要求3所述的换电方法,其特征在于,所述换电站根据所述满电电池包的充电位驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包包括:当所述换电站确定第一双伸缩机构和第二双伸缩机构的设置模式为分体模式时,将与所述满电电池包的充电位距离最近的换电机器人作为第一换电机器人,同时将未与所述满电电池包的充电位距离最近的换电机器人作为第二换电机器人,并向所述第一换电机器人发送第一指令,同时向所述第二换电机器人发送第二指令;所述第一换电机器人根据所述第一指令驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,同时所述第二换电机器人根据第二指令驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;或者所述第一换电机器人根据所述第一指令驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包之后,所述第二换电机器人根据第二指令驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;或者所述第二换电机器人根据第二指令驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包之后,所述第一换电机器人根据所述第一指令驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包。5.根据权利要求4所述的换电方法,其特征在于,所述换电站驱动所述第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第二双向伸缩机构将抓取的亏电电池包存放到所述充电位包括:所述换电站向所述第一换电机器人发送第三指令,同时向所述第二换电机器人发送第
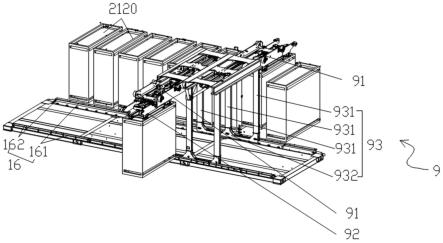
四指令;所述第一换电机器人根据所述第三指令驱动第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,同时所述第二换电机器人根据所述第四指令驱动第二双向伸缩机构将抓取的亏电电池包存放到所述充电位;或者所述第一换电机器人根据所述第三指令驱动第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上之后,所述第二换电机器人根据所述第四指令驱动第二双向伸缩机构将抓取的亏电电池包存放到所述充电位;或者所述第二换电机器人根据所述第四指令驱动第二双向伸缩机构将抓取的亏电电池包存放到所述充电位之后,所述第一换电机器人根据所述第三指令驱动第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上。6.根据权利要求3所述的换电方法,其特征在于,所述换电站根据所述满电电池包的充电位驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包包括:当所述换电站确定第一双伸缩机构和第二双伸缩机构的设置模式为合体模式时,将与所述满电电池包的充电位距离最近的双伸缩机构作为第一双伸缩机构,同时将未与所述满电电池包的充电位距离最近的双伸缩机构作为第二双伸缩机构,并向所述第三换电机器人发送第五指令;所述第三换电机器人根据所述第五指令驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包之后,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;或者所述第三换电机器人根据所述第五指令驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包之后,驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包。7.根据权利要求6所述的换电方法,其特征在于,所述换电站驱动所述第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第二双向伸缩机构将抓取的亏电电池包存放到所述充电位包括:所述换电站向所述第三换电机器人发送第六指令;所述第三换电机器人根据所述第六指令驱动第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上之后,驱动第二双向伸缩机构将抓取的亏电电池包存放到所述充电位;或者所述第三换电机器人根据所述第六指令驱动第二双向伸缩机构将抓取的亏电电池包存放到所述充电位之后,驱动第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上。8.一种基于双伸缩机构的换电系统,其特征在于,包括:换电车辆,用于向换电站发送换电请求;换电站,用于获取到换电车辆的换电请求后,确定满电电池包的充电位;根据所述满电电池包的充电位驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;以及驱动所述第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第二双向伸缩机构将抓取的亏电电池包存放到所述充电位。9.一种电子设备,其特征在于,包括:存储器;处理器;以及计算机程序;其中,所述计算
机程序存储在所述存储器中,并被配置为由所述处理器执行以实现如权利要求1-7任一项所述的方法。10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序;所述计算机程序被处理器执行以实现如权利要求1-7任一项所述的方法。
技术总结
本发明公开了一种基于双伸缩机构的换电方法、系统、设备及存储介质,涉及换电技术领域,其方法包括:换电站获取到换电车辆的换电请求后,确定满电电池包的充电位;所述换电站根据所述满电电池包的充电位驱动第一双向伸缩机构抓取位于所述充电位上的满电电池包,驱动第二双向伸缩机构抓取位于换电车辆上的亏电电池包;所述换电站驱动所述第一双向伸缩机构将抓取的满电电池包存放到所述换电车辆上,以及驱动所述第二双向伸缩机构将抓取的亏电电池包存放到所述充电位。电池包存放到所述充电位。电池包存放到所述充电位。
技术研发人员:杨轶 蔡宁 郭鹏 刘须宝 王若蒙
受保护的技术使用者:上海融青新能源科技有限公司
技术研发日:2022.08.02
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。