技术特征:
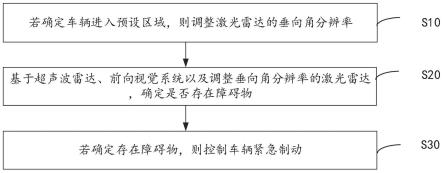
1.一种井下矿区的安全保护方法,其特征在于,所述井下矿区的安全保护方法包括:若确定车辆进入预设区域,则调整激光雷达的垂向角分辨率;基于超声波雷达、前向视觉系统以及调整垂向角分辨率的激光雷达,确定是否存在障碍物;若确定存在障碍物,则控制车辆紧急制动。2.如权利要求1所述的井下矿区的安全保护方法,其特征在于,所述调整激光雷达的垂向角分辨率的步骤包括:以车辆前向预设位置的坡度值减去车辆当前位置的坡度值,得到坡度值差值;获取激光雷达的安装高度、预设水平识别距离以及预设垂向扫描范围;基于所述安装高度、预设水平识别距离、预设垂向扫描范围以及坡度值差值,计算得到目标扫描角度范围;将目标扫描角度范围内激光雷达的角分辨率提升至第一预设分辨率,并将非目标扫描角度范围的其他扫描角度范围内激光雷达的角分辨率降低至第二预设分辨率。3.如权利要求2所述的井下矿区的安全保护方法,其特征在于,所述基于所述安装高度、预设水平识别距离、预设垂向扫描范围以及坡度值差值,计算得到目标扫描角度范围的步骤包括:将所述安装高度、预设水平识别距离、预设垂向扫描范围的下限值以及坡度值差值代入到第一公式中,得到目标扫描角度范围的下限值,其中,第一公式为:其中,θ1为目标扫描角度范围的下限值,h为激光雷达的安装高度,h1为激光雷达的预设垂向扫描范围的下限值,l为激光雷达的预设水平识别距离,i为坡度值差值;将所述安装高度、预设水平识别距离、预设垂向扫描范围的上限值以及坡度值差值代入到第二公式中,得到目标扫描角度范围的上限值,其中,第二公式为:其中,θ2为为目标扫描角度范围的上限值,h2为激光雷达的预设垂向扫描范围的上限值,h为激光雷达的安装高度,l为激光雷达的预设水平识别距离,i为坡度值差值。4.如权利要求1所述的井下矿区的安全保护方法,其特征在于,在所述若确定存在障碍物,则控制车辆紧急制动的步骤之前还包括:获取声音传感器所采集的多路声音信号;判断所述多路声音信号中是否存在预设信号;若所述多路声音信号中存在预设信号,则确定存在障碍物。5.如权利要求4所述的井下矿区的安全保护方法,其特征在于,所述判断所述多路声音信号中是否存在预设信号的步骤包括:基于多路声音信号的声音频率,确定所述多路声音信号中是否存在处于预设频域范围内的双频信号;若确定存在,则判断所述双频信号在预设距离内的声音强度是否大于预设强度值;
若大于,则确定所述双频信号的持续时长是否超过预设时长;若超过预设时长,则确定所述双频信号为有效信号;当在多路声音信号中监测到至少预设路的有效信号时,则确定所述多路声音信号中存在预设信号。6.一种井下矿区的安全保护装置,其特征在于,所述井下矿区的安全保护装置包括:调整模块,用于若确定车辆进入预设区域,则调整激光雷达的垂向角分辨率;确定模块,用于基于超声波雷达、前向视觉系统以及调整垂向角分辨率的激光雷达,确定是否存在障碍物;控制模块,用于若确定存在障碍物,则控制车辆紧急制动。7.如权利要求6所述的井下矿区的安全保护装置,其特征在于,所述调整模块,具体用于:以车辆前向预设位置的坡度值减去车辆当前位置的坡度值,得到坡度值差值;获取激光雷达的安装高度、预设水平识别距离以及预设垂向扫描范围;基于所述安装高度、预设水平识别距离、预设垂向扫描范围以及坡度值差值,计算得到目标扫描角度范围;将目标扫描角度范围内激光雷达的角分辨率提升至第一预设分辨率,并将非目标扫描角度范围的其他扫描角度范围内激光雷达的角分辨率降低至第二预设分辨率。8.如权利要求7所述的井下矿区的安全保护装置,其特征在于,所述调整模块,还具体用于:将所述安装高度、预设水平识别距离、预设垂向扫描范围的下限值以及坡度值差值代入到第一公式中,得到目标扫描角度范围的下限值,其中,第一公式为:其中,θ1为目标扫描角度范围的下限值,h为激光雷达的安装高度,h1为激光雷达的预设垂向扫描范围的下限值,l为激光雷达的预设水平识别距离,i为坡度值差值;将所述安装高度、预设水平识别距离、预设垂向扫描范围的上限值以及坡度值差值代入到第二公式中,得到目标扫描角度范围的上限值,其中,第二公式为:其中,θ2为为目标扫描角度范围的上限值,h2为激光雷达的预设垂向扫描范围的上限值,h为激光雷达的安装高度,l为激光雷达的预设水平识别距离,i为坡度值差值。9.一种井下矿区的安全保护设备,其特征在于,所述井下矿区的安全保护设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的井下矿区的安全保护程序,其中所述井下矿区的安全保护程序被所述处理器执行时,实现如权利要求1至5中任一项所述的井下矿区的安全保护方法的步骤。10.一种可读存储介质,其特征在于,所述可读存储介质上存储有井下矿区的安全保护程序,其中所述井下矿区的安全保护程序被处理器执行时,实现如权利要求1至5中任一项所述的井下矿区的安全保护方法的步骤。
技术总结
本发明提供一种井下矿区的安全保护方法、装置、设备及可读存储介质,井下矿区的安全保护方法包括:若确定车辆进入预设区域,则调整激光雷达的垂向角分辨率;基于超声波雷达、前向视觉系统以及调整垂向角分辨率的激光雷达,确定是否存在障碍物;若确定存在障碍物,则控制车辆紧急制动。本发明通过在车辆进入预设区域时,提升车辆基于激光雷达的行人识别能力,减少漏识别矿工人员的概率,以尽可能地避免车辆行驶至这些预设区域时,与井下矿工人员发生碰撞,从而提高了井下矿区的自动驾驶车辆在作业时的安全性。业时的安全性。业时的安全性。
技术研发人员:樊景帅 张昌德 裴鹏鹏 库新怡 林琬
受保护的技术使用者:东风商用车有限公司
技术研发日:2022.08.10
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。