1.本技术涉及机器人技术领域,尤其涉及一种控制模块安装结构和机器人。
背景技术:
2.智能机器人的控制模块用于接收指令,并控制机器人完成相应动作。在一些模式下,为保障机器人外观完整,控制模块一般内置于机器人内部,通过通讯装置远程接受指令;在另一些模式下,为了现场对机器人进行交互操作,也为了直观展现机器人的状态参数等信息,就需要在机器人上设置可操作可显示的终端设备(平板pad等)来作为控制模块。
3.目前这两种模式分别是以不用结构的机器人来实现,还不存在可以将外部控制模块挂载到机器人上,并能够在不需要时拆除以使得机器人可适用两种场景的结构。
技术实现要素:
4.鉴于上述问题,提出了本技术实施例,以便提供一种解决上述问题或至少部分地解决上述问题的控制模块安装结构和机器人。
5.本技术实施例提供一种控制模块安装结构,包括
6.安装支架,用于可拆卸地固定至机器人主体;以及,
7.连接件,用于固定至第一控制模块;
8.所述连接件和所述安装支架其中一者设置有插槽,另一者设置有插接凸部,所述插接凸部与所述插槽适配插合。
9.可选地,所述安装支架设置有第一安装孔,所述连接件设置有连接孔;
10.还包括第一紧固件,所述第一紧固件穿设于所述第一安装孔和所述连接孔,以锁紧所述安装支架和所述连接件。
11.可选地,所述连接件包括连接部和与之呈夹角设置的所述插接凸部,所述连接部用以与所述第一控制模块固定。
12.可选地,还包括连接插头和与之插合且电导通的连接插座,所述连接插头和所述连接插座其中一者与所述第一控制模块通过导线电连接,另一者与所述机器人主体通过导线电连接;
13.所述连接插头和/或所述连接插座固定在所述安装支架。
14.可选地,所述安装支架还设置有第二安装孔,所述连接插座设置有固定孔;
15.还包括第二紧固件,所述第二紧固件穿设于所述固定孔和所述第二安装孔,以锁紧所述安装支架和所述连接插座。
16.可选地,所述连接件设有所述插接凸部,所述插接凸部设有第一避让孔,所述连接插座穿设于所述第一避让孔;所述插槽的槽壁设置有第二避让孔,以供所述连接插座穿出。
17.本技术实施例还提出一种机器人,包括:
18.机器人主体;以及,
19.控制模块安装结构,所述安装支架与所述机器人主体固定,所述连接件与所述第
一控制模块可拆卸地固定。
20.可选地,所述机器人主体设置有可容纳第二控制模块的安装区间,所述第二控制模块为内置式控制模块,所述安装支架可拆卸地固定于所述安装区间内。
21.可选地,还包括盖板,所述盖板安装至所述机器人主体以盖合所述安装区间,且所述盖板具有避开所述控制模块安装结构的让位孔。
22.可选地,所述盖板设置有第一磁吸件,所述机器人主体设置有第二磁吸件,所述第一磁吸件和所述第二磁吸件磁性连接。
23.本技术实施例提供的技术方案,机器人主体上固定设置安装支架,第一控制模块固定设置连接件,连接件和安装支架固定。如此,第一控制模块并不是直接固定至机器人本体上的,而是通过安装支架和连接件进行转接,从而方便将第一控制模块固定,并且在不需要时,可以将安装支架与机器人主体拆除,以使得机器人适应两种场景。
附图说明
24.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本技术实施例的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
25.图1为本技术实施例中的一种机器人主体的结构示意图;
26.图2为图1中机器人主体的一分解示意图;
27.图3为图1中机器人主体的部分结构示意图;
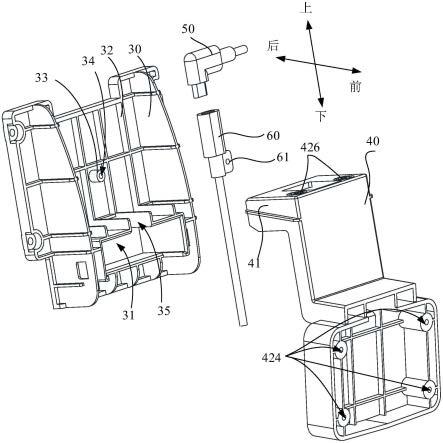
28.图4为本技术实施例中的一种控制模块安装结构的分解示意图;
29.图5为图4中控制模块安装结构的部分组装示意图;
30.图6为图5中控制模块安装结构的部分分解示意图。
31.附图标记:
32.标号名称标号名称标号名称100机器人主体21第二螺孔42连接部10胸腔外壳30安装支架421第一段11胸腔前壳31插槽422第二段111安装区间32加强肋板423第三段12胸腔后壳33凸柱424第一螺孔13前骨骼34第二安装孔425第一避让孔131限位孔
ꢀꢀ
426连接孔14盖板35第二避让孔50连接插头141让位孔40连接件60连接插座200第一控制模块41插接凸部61固定孔
具体实施方式
33.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是
本技术实施例一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术实施例保护的范围。
34.需要说明的是,在本技术的描述中,若出现术语“第一”、“第二”等,则“第一”、“第二”仅用于方便描述不同的部件或名称,而不能理解为指示或暗示顺序关系、相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,若全文中出现“和/或”,则其含义为,包括三个并列的方案,以“a和/或b为例”,包括a方案,或b方案,或a和b同时满足的方案。
35.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
36.请结合参考图1至图6,本技术实施例提供一种控制模块安装结构和机器人,采用安装支架30和连接件40作为转接件,实现第一控制模块200和机器人主体100的连接固定,可以将外部控制模块即第一控制模块200挂载到机器人上,并能够在不需要时拆除以使得机器人可适用两种场景。
37.请结合参考图4至图6,本技术实施例提供一种控制模块安装结构,用于将第一控制模块200安装至机器人主体100上,该控制模块安装结构具体包括安装支架30和连接件40。
38.具体而言,安装支架30用于可拆卸地固定至机器人主体100;连接件40用于固定至第一控制模块200。
39.机器人主体100上固定设置安装支架30,第一控制模块200固定设置连接件40,而连接件40和安装支架30固定。如此,第一控制模块200并不是直接固定至机器人本体上的,而是通过安装支架30和连接件40进行转接,从而方便将第一控制模块200固定,并且在不需要时,可以将安装支架30与机器人主体100拆除,以使得机器人适应两种场景。
40.另外,所述连接件40和所述安装支架30其中一者设置有插槽31,另一者设置有插接凸部41,所述插接凸部41与所述插槽31适配插合。连接件40和安装支架30采用插接凸部41和插槽31的方式进行插合,插槽31对插接凸部41具有导向和定位作用,方便连接件40和安装支架30的对位安装。并且,连接件40和安装支架30通过插槽31和插接凸部41固定,该固定方式简单可靠,直接插接配合即可,因此大大方便了用户操作。
41.插接凸部41的形状包括但不限于方形、圆形、椭圆形、三角形等,插接凸部41可以是实体结构或者是空心结构。示例性的,插接凸部41包括两个相对设置的第一侧壁以及连接两个第一侧壁的第二侧壁,两个第一侧壁位于第二侧壁的同一侧。插槽31的形状与插接凸部41类似,两者紧配插合,从而避免安装支架30和连接件40松脱。示例性的,插槽31为长方形通孔。
42.本技术一些实施例中,连接件40包括连接部42和与之呈夹角设置的插接凸部41,连接部42用以与第一控制模块200固定。
43.连接部42的形状包括但不限于板状、杆状、块状等,示例性的,连接部42呈阶梯型板状,并包括依次连接的第一段421、第二段422和第三段423,第一段421和第三段423平行或者大体接近于平行,并分设于第二段422的两相对侧,相对于第二段422沿相反方向延伸;
第二段422与第一段421垂直或者接近于垂直,同样的,第二段422与第三段423垂直或者接近于垂直。如此,第一段421、第二段422和第三段423形成阶梯型。
44.其它实施例中,连接件40的连接部42还可以呈一直板,或者,连接部42呈l型等等。
45.插接凸部41连接在第一段421远离第二段422的一端,并与第一段421呈夹角设置。可选地,插接凸部41与第一段421垂直。当然,其它实施例中,插接凸部41与第一段421之间的夹角可以小于90
°
或者大于90
°
,例如但不限于60
°
、120
°
。插接凸部41与第二段422相对第一段421沿相反方向延伸。
46.连接件40与第一控制模块200固定,在一具体实施方式中,连接件40的第三段423与第一控制模块200固定。具体的固定方式包括但不限于螺钉固定、卡扣固定等。具体而言,连接部42具有相背离的第一表面和第二表面,插接凸部41设置在第一表面,且沿第二表面指向第一表面的方向延伸,第二表面面向第一控制模块200。第二表面上设置多个第一螺孔424,第一控制模块200对应设置多个第二螺孔21,螺钉穿设于第一螺孔424和第二螺孔21,从而将连接件40与第一控制模块200固定。因此第一段421可以朝后伸入到机器人主体100内,而第三段423可以向前凸出在机器人主体100前侧,从而实现与之连接的第一控制模块200凸出在机器人主体100前侧。
47.安装支架30可以呈板状、块状、杆状、空腔状等等,安装支架30的形状可以是圆形、方形、三角形等。在一具体实施方式中,安装支架30包括底板以及连接在底板两相对侧的两个侧板,底板上形成有插槽31,安装支架30通过其底板与机器人本体固定。进一步地,安装支架30的底板和侧板上设置多个加强肋板32,多个加强肋板32可以呈纵横交错设置,加强肋板32能够增加安装支架30的强度。可选地,加强肋板32之间形成上述的插槽31,且插槽31还贯穿底板,形成通孔。
48.进一步地,安装支架30设置有第一安装孔(图未示出),连接件40设置有连接孔426;第一紧固件(图未示出)穿设于第一安装孔和连接孔426,以锁紧安装支架30和连接件40。第一紧固件包括但不限于螺钉、螺栓、铆钉等。通过将第一紧固件锁紧安装支架30和连接件40,可以避免安装支架30和连接件40脱离,从而使得第一控制模块200稳定安装在机器人本体上。
49.可选地,安装支架30设置两个第一安装孔,两个第一安装孔设置在插槽31的槽顶,连接件40对应设置两个连接孔426。具体地,连接件40的插接凸部41设有两个连接孔426,两个连接孔426沿左右方向间隔设置,且连接孔426可沿上下方向贯穿插接凸部41。第一避让孔425可以设置在两个连接孔426之间。
50.进一步地,安装结构还包括连接插头50和与之插合且电导通的连接插座60,连接插头50和连接插座60其中一者与第一控制模块200通过导线电连接,另一者与机器人主体100通过导线电连接;因此当将连接插头50和连接插座60插合时,第一控制模块200和机器人本体通电导通,可以实现电信号的传递。在一示例中,连接插头50与机器人本体通过导线连通,即连接插头50是从机器人本体的内部走线引出到安装区间中,连接插座60与第一控制模块200通电通过导线连通。
51.连接插座60设置有插孔,连接插头50则设有插头端,插头端插入到插孔内,实现电连接。
52.上述中,连接插头50和连接插座60其中一者固定在安装支架30。或者,连接插头50
和连接插座60两者都固定在安装支架30。例如,将连接插座60固定在安装支架30上,而连接插头50是插合在连接插座60的,故而相当于连接插头50也相对安装支架30固定。
53.具体组装时,可以先将安装支架30固定至机器人主体100,连接件40固定至第一控制模块200,然后再分别将第一控制模块200上的连接插座60固定至安装支架30,连接件40也固定至安装支架30,机器人本体上引出的连接插头50插入到连接插座60内,从而实现第一控制模块200相对机器人本体的固定,且实现两者的电连接。
54.通过设置连接插头50和连接插座60的形式来实现第一控制模块200和机器人主体100之间的电导通,可以直接采用插接的形式,而不需要在后续进行反复的导线连接操作,即使在取下第一控制模块200时,也仅需要将连接插座60和连接插头50分离即可,不需要拆除导线,因此大大方便了导线的布置,也方便了第一控制模块200与机器人主体100分离。
55.进一步地,安装支架30还设置有第二安装孔34,连接插座60设置有固定孔61;第二紧固件穿设于固定孔61和第二安装孔34,以锁紧安装支架30和连接插座60。第二紧固件包括但不限于螺钉、螺栓、铆钉等。
56.在一具体实施方式中,安装支架30设置凸柱33,凸柱33上设置第二安装孔34,连接插座60的固定孔61套设在凸柱33外,故而在组装时,可以先将连接插座60的固定孔61套设在安装支架30的凸柱33外,然后再采用第二紧固件将连接插座60和安装支架30锁紧。凸柱33伸入到固定孔61内,可以起到预定位的作用,便于后语第二紧固件与固定孔61和第二安装孔34的对准。
57.进一步地,连接件40设有插接凸部41,插接凸部41设有第一避让孔425,连接插座60穿设于第一避让孔425;插槽31的槽壁设置有第二避让孔35,以供连接插座60穿出。
58.以上下方向为例,插接凸部41设置在连接件40的上端,并朝后延伸,故而插槽31的槽口朝前设置,因此插接凸部41向后插入凹插槽31内。第一避让孔425沿上下方向贯穿插接凸部41,连接插座60沿上下方向穿设于第一避让孔425。插槽31的上槽壁设置第二避让孔35,连接插座60向上穿过第二避让孔35后穿出,并与位于上方的第二安装孔34通过第二紧固件锁定,且与上方的连接插头50插接。
59.本技术实施例中,安装支架30与机器人主体100通过螺钉固定。示例性的,安装支架30的四个角各自设置一个螺孔,机器人主体100对应设置四个限位孔131而与安装支架30连接。当然,安装支架30和机器人主体100之间还可以采用焊接固定、卡扣卡接等。
60.请结合参考图1至图3,机器人主体100包括胸腔骨骼以及设置在胸腔骨骼外侧的胸腔外壳10,胸腔外壳10可大体与人体的胸部外形呈仿形设置,此处的仿形指的是两者的外形大体相同或者类似。
61.为方便其它结构的安装,胸腔外壳10可以是中空的结构,例如胸腔外壳10具有一容置腔,该容置腔内能够容纳一些电子元器件和电子元器件之间的电连接线。
62.在本技术一些实施例中,胸腔外壳10可以是由至少两个壳体拼接形成。示例性的,胸腔外壳10包括位于前侧的胸腔前壳11和位于后侧的胸腔后壳12,胸腔前壳11和胸腔后壳12拼接形成一容置腔。此外,在一些实施例中,胸腔外壳10还可以由更多个单独的壳体拼接形成。或者,在本技术另一些实施例中,胸腔外壳10为一个整体的壳体。
63.胸腔外壳10附着于胸腔骨骼(图2和图3中示出的为胸腔骨骼的前骨骼13)上。此处的附着指的是,胸腔外壳10的内侧面至少部分抵靠在胸腔骨骼,通过胸腔骨骼进行支撑。
64.一些具体实施方式中,胸腔骨骼设置在容置腔,并与胸腔外壳10固定。其中,胸腔外壳10作为外观件,起到美观以及防护的作用,胸腔骨骼可以作为结构加强件,保证整体强度,同时,胸腔骨骼还可以起到支撑作用,使得胸腔外壳10附着在胸腔骨骼上,减小甚至避免胸腔外壳10被挤压变形。
65.胸腔骨骼可以呈块状、杆状、椭圆状等等。示例性的,胸腔骨骼的大体外形可与胸腔外壳10类似,从而使得两者更加契合,且胸腔外壳10的更多区域能够抵靠在胸腔骨骼,两者之间接触面积更大,因此胸腔骨骼对胸腔外壳10的支撑效果更好。
66.在一些实施例中,胸腔骨骼可以是一个整体的骨骼,能够同时供胸腔前壳11和胸腔后壳12抵靠。当然,在一些实施例中,胸腔骨骼可以通过多个骨骼拼接形成。示例性的,胸腔骨骼包括位于前方的前骨骼13(图中示出的为前骨骼13)和位于后方的后骨骼,前骨骼13和后固定相互连接。胸腔前壳11的内侧面抵靠于前骨骼13的前侧,胸腔后壳12的内侧面抵靠于后骨骼的后侧。
67.进一步地,机器人主体100还设有安装区间111,该安装区间111用于容纳第二控制模块,第二控制模块为内置式控制模块,即设置在机器人主体100的内部。第一控制模块200可以是外置式控制模块,用于设置在机器人主体100的内部。
68.在一具体实施方式中,胸腔外壳10设置有安装区间111,安装支架30固定在胸腔骨骼,并经由安装区间111显露。在安装支架30上设置连接件40,可以使得连接件40部分凸出在安装区间111外,而与位于外侧的第一控制模块200固定。第一控制模块200能够将安装区间111部分遮挡或者是全部遮挡。以第一控制模块200设置在机器人主体100的前侧为例,本实施例中,胸腔前壳11设置安装区间111,安装支架30固定在前骨骼13上。
69.进一步地,机器人还包括盖板14,盖板14安装至机器人主体100,并与安装区间111盖合,且盖板14避开安装结构。此处盖板14避开安装结构指的是,盖板14设置避开控制模块安装结构的让位孔141,控制模块安装结构穿过让位孔141。设置盖板14后,将安装区间111盖住,避免内部零部件显露在外。
70.为方便组装,盖板14设置有第一磁吸件,机器人主体100如胸腔外壳10设置有第二磁吸件,第一磁吸件和第二磁吸件磁性连接。第一磁吸件和第二磁吸件其中一者为磁铁,另一者为磁铁或者金属件。设置磁吸的方式,可以快速组装或者拆除盖板14和胸腔外壳10。可选地,盖板14的四个角分别设置一个第一磁吸件,因此相对应地,胸腔外壳10也设置四个第二磁吸件。
71.第一控制模块200可以是显示屏、触摸屏,一具体实施方式中,第一控制模块200为pad。
72.本技术实施例还提供一种机器人,机器人包括控制模块安装结构,控制模块安装结构的具体结构请参考上述实施例,此处不再赘述。
73.最后应说明的是:以上实施例仅用以说明本技术实施例的技术方案,而非对其限制;尽管参照前述实施例对本技术实施例进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术实施例各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
