1.本实用新型涉及工业机器人技术领域,具体涉及一种机器人末端简便的手动连接器。
背景技术:
2.工业机器人在生产制造中得到广泛应用,而工业机器人末端在应用中需要经常更换不同规格的设备。
3.现有技术中,机器人末端与设备端连接通常采用螺栓紧固连接的方式,该连接方式在安装时需要调整机器人末端法兰所有安装孔与设备端精确对准才能安装所有螺栓,同时在更换设备时需要拆卸所有螺栓,再次精确对准进行装配,费时费力,尤其在更换次数较多的情况下其工作效率大大降低;也有采用气动连接的方式其更换速度快,特别是控制程序和设计结构复杂、成本高,且带有一定的安全隐患,用户不能轻易接受。
技术实现要素:
4.本实用新型目的在于提供一种机器人末端简便的手动连接器,旨在解决现有机器人末端与设备连接方式造成的工作效率低下,且结构设计复杂、成本高的问题。
5.本实用新型提供了一种机器人末端简便的手动连接器,包括连接在设备端的第一接头和连接在机器人末端的第二接头,其特征在于,还包括可拆卸连接在第二接头上的锁紧限位块,所述第一接头上设有圆柱凸部,所述圆柱凸部穿插在第二接头中与所述第二接头采用卡扣结构互相锁合或者脱离,所述锁紧限位块抵接在圆柱凸部的一侧对第一接头进行限位。
6.进一步地,所述卡扣结构包括:与所述第一接头一体设有圆柱凸部,所述圆柱凸部设有圆环扣部;以及,所述第二接头设有通孔内腔,所述通孔内腔内设为卡口,所述卡口设为卡接部;其中所述圆柱凸部穿插通孔内腔,通过第二接头位移控制卡接部与第一接头扣部的卡扣式锁合或脱离。
7.进一步地,所述圆柱凸部与所述通孔内腔等径同心圆,所述卡口与所述扣部为等径同心圆,且所述圆柱凸部与所述卡口等径不同心圆。
8.本实用新型通过第一接头圆柱凸部设置的圆环扣部与第二接头通孔内腔设置的卡接部进行卡扣式装配结构实现锁合或脱离功能,实现穿接、抽出、位移功能,结构设计简单且紧凑,体积小,装配方便。又通过第一接头圆柱凸部与第二接头通孔内腔相同直径且同一轴线圆心实现第一接头圆柱凸部穿接第二接头通孔内腔以及第二接头卡口与第一接头扣部相同直径且同一轴线圆心在第二接头位移控制下进行卡扣式装配,第二接头卡口上下端面与第一接头扣部上下端面紧紧贴合,装配时卡接部与圆环扣部自动对中,节省时间,强度高且连接稳定性好。
9.进一步地,所述第一接头远离圆柱凸部一端设为u形夹紧块且所述u形夹紧块设有螺栓安装孔,用于连接设备。
10.进一步地,所述第二接头采用马蹄形结构,所述第二接头一端设有安装孔与所述锁紧限位块连接。
11.进一步地,所述锁紧限位块设有与第二接头连接的螺纹安装孔,且所述锁紧限位块一端凸伸部抵接所述第一接头圆柱凸部的一侧。
12.由于第一接头圆柱凸部穿插第二接头通孔内腔内进行位移实现卡接后,通过第二接头设置为开口的马蹄形结构与锁紧限位块连接,锁紧限位块凸伸部抵接第一接头圆柱凸部的一侧对第一接头进行限位,增加其稳定性、可靠性,有效防止第一接头运行中无法脱落,保障设备的安全。
13.本实用新型提供一种应用于机器人末端简便的手动连接器,通过第一接头圆柱凸部设置的圆环扣部与第二接头通孔内腔设置的卡接部进行卡扣式装配结构以及锁紧限位块凸伸部端面抵接第一接头圆柱凸部的一侧实现锁合或脱离功能,结构设备简单且紧凑,接头之间易精确对中,只需装配锁紧限位块螺栓快速实现安装或更换设备,手动装配简单、节省时间,大大提高了工作效率,减少制造成本和装配难度,稳定性可靠。
附图说明
14.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单的介绍,应当理解,以下附图仅示出了本实用新型的应用实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
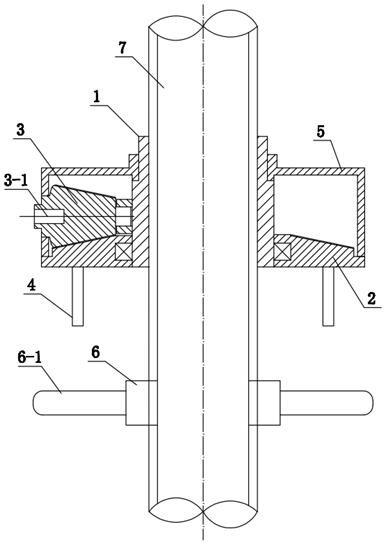
15.图1为本实用新型实施例提供的一种机器人末端简便的手动连接器的结构示意图;
16.图2为本实用新型实施例提供的一种机器人末端简便的手动连接器的第一接头示意图;
17.图3为本实用新型实施例提供的一种机器人末端简便的手动连接器的第二接头示意图;
18.图4为本实用新型实施例提供的一种机器人末端简便的手动连接器的锁紧限位块示意图;
19.图中:1-第一接头,2-第二接头,3-锁紧限位块,11-圆柱凸部,12-扣部,13-u形夹紧块,14-平面端面,20-通孔内腔,21-卡口,22-卡接部,23-安装孔,24-法兰安装孔,25-卡口台阶,26-第二接头开口平面端面,30-安装孔,31-锁紧限位块凸伸部。
具体实施方式
20.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.以下结合具体实施例对本实用新型的具体实现进行详细描述。
22.如图1所示,在实施例中,一种机器人末端简便的手动连接器,包括连接在设备端的第一接头和连接在机器人末端的第二接头,还包括可拆卸连接在第二接头上的锁紧限位
块,所述第一接头上设有圆柱凸部,所述圆柱凸部穿插在第二接头中与所述第二接头采用卡扣结构互相锁合或者脱离,所述锁紧限位块抵接在圆柱凸部的一侧对第一接头进行限位。
23.具体地,如图1至图2所示,所述圆柱凸部11设有圆环扣部12,所述圆柱凸部11的圆心与所述圆环扣部12圆心为偏心设置,进而形成所述第一接头圆柱凸部的圆环扣部12,所述圆环扣部12的直径等于所述圆柱凸部11的直径;所述第二接头2还设有通孔内腔20,通孔内腔20直径与所述第一接头1的圆柱凸部11的外径相等,使得所述第一接头的圆柱凸部11能穿插第二接头内;所述第二接头通孔内腔20一侧设有卡口21,所述卡口21处设有与第一接头1圆环扣部12相配合的圆环卡接部22,所述圆环卡接部22的直径与所述第一接头1圆环扣部12的直径相等,所述圆环卡接部22的圆心与所述通孔内腔20的圆心为偏心设置,且偏心距离和方向与所述第一接头1圆柱凸部11、圆环扣部12圆心偏心距离相等、方向相反,进而在所述卡口21形成与第一接头1扣部12配合的卡口台阶25。
24.实施例中,一种机器人末端简便的手动连接器,所述第一接头1圆柱凸部11圆心与所述第二接头2通孔内腔20的圆心在同一轴线上,第一接头1圆柱凸部11可穿插第二接头2通孔内腔20内,第二接头2再通过机器人末端程序控制位移使其圆心不在同一轴线上,因第二接头圆环卡接部22与第一接头圆环扣部12为同一圆心且圆弧面相同在位移时自动对中,进一步使所述第一接头1圆环扣部12圆心与所述第二接头2圆环卡接部22圆心在一条轴线上实现了卡扣锁紧功能,通过圆心的偏离和位移量实现第一接头1和第二接头2锁合或脱离。
25.所述第一接头11另一端设有安装设备端的夹紧块,所述夹紧块形状为u型且设有安装设备端的安装孔13,方便连接更换的设备。又具体地,如图1至图3所示,所述第二接头2设有机器人法兰安装孔24,第二接头与机器人法兰通过螺栓紧固连接,从而方便将第二接头稳定的锁紧在机器人末端。
26.一种机器人末端简便的手动连接器,第一接头1连接设备置于固定架内,第二接头2由机器人末端程序控制,机器人末端程序控制第二接头2使通孔内腔20套入第一接头1圆柱凸部11或第一接头1圆柱凸部11穿插第二接头2通孔内腔20内,控制第二接头2位移使得第一接头1圆环扣部12扣于第二接头2卡口21处的卡口台阶25进行卡扣式装配,实现第一接头1和第二接头2锁合或脱离功能。
27.实施例中,由于卡口台阶为圆弧状,装配时卡接部22与圆环扣部12自动对中,利用机器人末端程序控制或者人工手动操作控制第二接头进行位移的空间与上述所述圆心的偏心距离、方向配合达到间隙装配,其结构设计简单且紧凑,强度高、体积小,装配极其方便,制造成本和装配难度大幅度减少,节省了大量的装配时间,大大提高了更换或安装的工作效率。
28.实施例中,如图1、图4所示,为了增强其手动连接器的稳定性,所述第二接头2采用马蹄形结构,所述第二接头2开口平面端面26设有安装孔23与所述锁紧限位块3连接,所述锁紧限位块3设有与第二接头2连接的螺纹安装孔30,且所述锁紧限位块凸伸部31抵接所述第一接头1圆柱凸部11的一侧。具体地,所述第一接头1圆柱凸部11采用”d”形状,其圆环扣部12位于”d”形状圆弧端面,另一端为平面端面14(即圆柱凸部侧面),所述第二接头2圆环卡接部22位于马蹄形带有弧线的一端,另一端为开口平面端面26;所述第二接头2开口平面
型端面26、所述锁紧限位块凸伸部31、所述第一接头1圆柱凸部11的侧面14为平行设置。连接第二接头时,所述锁紧限位块凸伸部31嵌入第二接头2抵接第一接头1圆柱凸部11的侧面14,再通过锁紧限位块3的安装对第一接头进行限位,使得第一接头1与第二接头2之间在工作运行中不易松动,安装更加方便,易维护,牢固可靠,解决了现有技术中通过螺栓紧固连接方式中每个安装孔精确对准费力费时,简化装配工艺,提高效率和连接稳定性。
29.一种机器人末端简便的手动连接器的方法,具体实施过程:固定第一接头1连接的设备,机器人末端连接的第二接头2,将第一接头1圆柱凸部11穿插第二接头2通孔内腔内20,使第二接头2一端面与第一接头1夹紧块一端面完全贴合,再驱使第二接头2卡接部22与第一接头1扣部12的圆心在同一轴线上紧密贴合、自动对中以实现卡扣装配,然后安装锁紧限位块3使其凸伸部31抵接第一接头1圆柱凸部11的一侧,达到锁合状态;机器人末端卸载设备时,第一接头1连接的设备置于固定架内,手动卸下锁紧限位块3螺栓,第二接头2位移使通孔内腔20与第一接头1圆柱凸部11圆心在同一轴线上,再将第一接头1圆柱凸部11从第二接头2通孔内腔20抽出,卸载设备完成。
30.实施例中,所述锁紧限位块与所述第二接头可固为一体式,可在第二接头设置若干锁紧销与第一接头圆柱凸部设置若干对应的销孔配合通过锁紧销抵接第一接头圆柱凸部进行限位,防止第一接头从第二接头掉落、脱离现象。
31.本实用新型提供一种应用于机器人末端手动连接器,通过第一接头圆柱凸部设置的圆环扣部与第二接头通孔内腔设置的卡接部进行卡扣式装配结构以及锁紧限位块抵接在圆柱凸部的一侧对第一接头进行限位实现锁合或脱离功能,结构设备简单且紧凑,接头之间易精确对中,只需装配锁紧限位块螺栓快速实现安装或更换设备,手动装配简单、节省时间,大大提高了工作效率,稳定性可靠,使手动连接器小型化。在实际的工作中易于作业人员操作和维护,且体积小减少了机器人关节承载力,也大大减少制造成本和装配难度,提高了设备更换效率,即使更换次数频繁也影响不了生产效率,实用性大大增强。
32.以上各实施例仅用以说明本实用新型的技术方案,而非对其限制,本领域的普通技术人员应当理解,其依然可以对上述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换,而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。