1.本实用新型涉及智能消杀机器人技术领域,特别是一种对移动消杀机器人底盘进行清洁消杀的装置。
背景技术:
2.智能消杀机器人会出现在有传染病毒的病房里,或者在具有不同传染病毒的病房里反复穿梭,而机器人底盘,特别是轮毂,是与地面接触最多的地方,因此底盘和轮毂上也会携带大量的病毒或者灰尘。因此消杀机器人不仅要对周围环境进行消杀,还要对本体进行消杀,特别是对底盘部分的消杀。
3.现有技术中没有专门对消杀机器人底盘进行清洁消杀的装置,常用的清洁消杀是人工喷洒消杀液,这种方法不仅消杀不彻底,而且液体消杀液也会威胁底盘内部电路,存在很大的风险,当采用人工清洁时,会将人类暴露在有病毒细菌的环境里,给操作人员的安全造成了严重的威胁。此外,还有些消杀机器会在底盘内部装有消杀紫外灯,但是这种方式存在消杀死角且单纯的进行消杀,无法对轮毂进行清洁,并且如果每台消杀机器人都装有单独的消杀紫外灯,就会导致单机成本增加,不利于量产。
技术实现要素:
4.本实用新型的目的是为了解决上述问题,设计了一种对移动消杀机器人底盘进行清洁消杀的装置,应用于轮式移动消杀机器人的底盘,包括升降机构、清洁机构、消毒机构和固定座,所述固定座内部固定有升降机构与清洁机构,所述升降机构可沿所述固定座内延伸至所述固定座外用于提升轮式消杀机器人的高度使轮毂悬空,所述清洁机构可沿所述固定座内延伸至所述固定座外以对移动机器人的底盘进行清洁。
5.进一步地,所述升降机构包括第一驱动装置、升降连杆组件、丝杆组件和升降顶板,所述第一驱动装置与丝杆组件固定连接,所述丝杆组件与升降连杆组件固定连接,升降顶板与所述升降连杆组件转动设置。
6.进一步地,所述升降连杆组件包括第一连杆、第二连杆、第一滑轨和第二滑轨,所述第一连杆与所述第二连杆在其二者中部转动连接,所述第一连杆两端分别与所述第一滑轨、所述第二滑轨滑动连接,所述第二连杆两端分别与所述第一滑轨、所述升降顶板转动连接。
7.进一步地,所述丝杆组件包括丝杆与丝杆螺母,所述丝杆与第一驱动装置固定连接,丝杆螺母与所述丝杆螺纹连接,所述丝杆螺母与第二连杆固定连接。
8.进一步地,所述清洁机构包括驱动单元和清洁单元,所述驱动单元与所述清洁单元滚动设置以带动所述清洁单元转动角度。
9.进一步地,所述驱动单元包括第二驱动装置、主动件、第一从动件、第二从动件和导向组件,所述第二驱动装置输出端固定有主动件,所述主动件与第一从动件相互啮合,所述第一从动件与第二从动件相互啮合,所述第二从动件与所述清洁单元固定连接以改变所
述清洁单元的转动角度,所述第一从动件与所述固定座之间固定有导向组件。
10.进一步地,所述清洁单元包括旋转座、固定架和清洁刷,固定架固定于所述固定座上,旋转座转动设置于所述固定架上,所述旋转座与所述第二从动件固定连接,所述清洁刷与所述旋转座固定连接。
11.进一步地,所述导向组件包括导向轨和与所述导向轨滑动设置的滑块,所述导向轨与固定座固定连接,所述滑块与所述第一从动件固定连接。
12.进一步地,所述消毒机构为紫外消毒设备,所述紫外消毒设备至少设置有两组,其中两组所述紫外消毒灯分别设置于所述升降机构两侧。
13.进一步地,还包括收集单元,所述收集单元包括负压设备和收集盒,所述负压设备连通有收集盒,所述收集盒连通向旋转座,所述旋转座上固定清洁刷的一侧开设有若干个负压吸尘孔。
14.进一步地,还包括控制柜,所述控制柜外部安装有用于识别定位的红外定位传感器与辅助定位识别块,所述红外定位传感器设置于所述辅助定位识别块两侧。
15.进一步地,还包括设置于控制柜内部的主控系统,与第一驱动装置、第二驱动装置、负压设备电性连接,用于控制其启动与停止,进而控制整个消杀清洁装置的动作流程。主控系统辅助消杀机器人在清洁消杀装置上的定位以及与云服务端进行通讯。
16.进一步地,还包括云服务端,云服务端用于接收消杀机器人需要清洁消杀的请求,并获取消杀清洁装置当前状态信息,还用于调度消杀机器人进行消杀清洁。
17.利用本实用新型的技术方案制作的一种对移动消杀机器人底盘进行清洁消杀的装置,所达到的有益效果:
18.(1)通过升降机构将移动消杀机器人的轮毂悬空,通过uvc紫外灯进行消毒,清洁机构通过主控系统的控制,将藏在固定座内部的清洁毛刷组件旋转出来,使毛刷与轮毂接触,进而实现清洁,进一步通过负压设备将灰尘收集到收集盒中,遵循科学消杀的方式方法,进行全覆盖的消杀,清洁,解决了人工清洁底盘清洁不彻底的问题;
19.(2)当有多台消杀机器人需要消杀时,可以自动控制每台消杀机器人进行消杀,且消杀技术规格都能达到统一规格;
20.(3)可以实现一个消毒清洁装置对多个消杀机器人进行清洁的问题,相同规格的消杀机器人都可以进行消杀,清洁工作,且对多台移动消杀机器人的调度实现有序控制。
附图说明
21.图1是本实用新型所述一种对移动消杀机器人底盘进行清洁消杀的装置的未工作状态结构示意图;
22.图2是本实用新型所述一种对移动消杀机器人底盘进行清洁消杀的装置的工作状态结构示意图;
23.图3是本实用新型所述一种对移动消杀机器人底盘进行清洁消杀的装置的内部结构示意图;
24.图4是本实用新型升降机构的结构示意图;
25.图5是本实用新型清洁机构与收集单元的立体图;
26.图6是本实用新型所述一种对移动消杀机器人底盘进行清洁消杀的装置的使用状
态示意图;
27.图7是本实用新型所述一种对移动消杀机器人底盘进行清洁消杀的装置的另一视角的使用状态示意图;
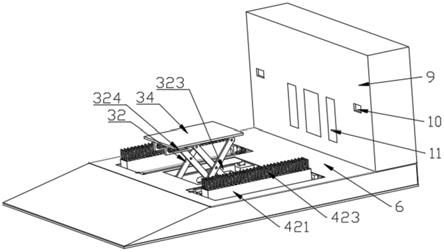
28.图中,1、移动消杀机器人;2、底盘;3、升降机构;31、第一驱动装置;32、升降连杆组件;321、第一连杆;322、第二连杆;323、第一滑轨;324、第二滑轨;33、丝杆组件;331、丝杆;332、丝杆螺母;34、升降顶板;4、清洁机构;41、驱动单元;411、第二驱动装置;412、主动件;413、第一从动件;414、第二从动件;415、导向组件;416、导向轨;417、滑块;42、清洁单元;421、旋转座;422、固定架;423、清洁刷;5、消毒机构;6、固定座;7、轮毂;8、收集单元;81、负压设备;82、收集盒;83、负压吸尘孔;9、控制柜;10、红外定位传感器;11、辅助定位识别块。
具体实施方式
29.为了更好的理解本实用新型,下面结合具体实施例和附图对本实用新型进行进一步的描述,一种对移动消杀机器人底盘进行清洁消杀的装置。参阅图1、图6和图7,应用于轮式移动消杀机器人1的底盘2,包括升降机构3、清洁机构4、消毒机构5和固定座6,所述固定座6内部固定有升降机构3与清洁机构4,所述升降机构3可沿所述固定座6内延伸至所述固定座6外用于提升轮式消杀机器人的高度使轮毂7悬空,所述清洁机构4可沿所述固定座6内延伸至所述固定座6外用以对移动机器人的底盘2进行清洁。轮式移动消杀机器人1是具有可以生成当前环境地图和自动规划路径功能的智能消杀设备,且移动消杀机器人1的本体四周均可被紫外灯光线照射得到。该装置具有云服务端,用于接收消杀机器人需要清洁消杀的请求,并获取消杀清洁装置当前状态信息,还用于调度消杀机器人进行消杀清洁。消杀清洁装置是对消杀机器人进行清洁消杀的执行端,包括升降机构3、清洁机构4、消毒机构5和固定座6,还包括控制柜9,所述控制柜9外部安装有用于识别定位的红外定位传感器10与辅助定位识别块11,所述红外定位传感器10设置于所述辅助定位识别块11两侧。消杀机器人通过红外定位传感器10以及辅助定位识别块11识别固定座6的位置,固定座6具有向下倾斜的斜坡以便于消杀机器人沿斜坡运动至固定座6上。当消杀机器人运动至固定座6后,主控系统控制升降机构3启动,升降机构3将消杀机器人托起,使消杀机器人轮毂7脱离地面,从而达到悬空状态给轮毂7清洁提供条件。进一步启动消毒机构5,通过紫外照射将消杀机器人底盘2进行消毒。与消毒同时启动或者在消毒之后启动清洁机构4,清洁机构4将藏在固定座6内部的清洁刷423旋转出来,使清洁刷423与轮毂7接触达到清洁作用。
30.参阅图2-4,所述升降机构3包括第一驱动装置31、升降连杆组件32、丝杆组件33和升降顶板34,所述第一驱动装置31与丝杆组件33固定连接,所述丝杆组件33与升降连杆组件32固定连接,升降顶板34与所述升降连杆组件32转动设置。所述升降连杆组件32包括第一连杆321、第二连杆322、第一滑轨323和第二滑轨324,所述第一连杆321与所述第二连杆322在其二者中部转动连接,所述第一连杆321两端分别与所述第一滑轨323、所述第二滑轨324滑动连接,所述第二连杆322两端分别与所述第一滑轨323、所述升降顶板34转动连接。所述丝杆组件33包括丝杆331与丝杆螺母332,所述丝杆331与第一驱动装置31固定连接,丝杆螺母332与所述丝杆331螺纹连接,所述丝杆螺母332与第二连杆322固定连接。第一驱动装置31可选择为电机,第一驱动装置31启动后带动丝杆331转动,与丝杆331螺纹连接的丝杆螺母332沿丝杆331进行移动,并且带动第二连杆322在第二滑轨324内移动,相应的,第一
连杆321与第二连杆322之间的张开角度发生变化,升降顶板34的高度得到提升,运动至升降顶板34上的消杀机器人的高度也随之得到提升,消杀机器人底盘2中的轮毂7悬空,以便于后续消毒与清洁。升降机构3在进行消杀清洁作业时伸出固定座6外部,在等待工作时升降顶板34的高度下降,升降机构3缩回到固定座6内部,节省空间并且防止表面聚集灰尘。
31.参阅图3,所述消毒机构5为紫外消毒设备,所述紫外消毒设备至少设置有两组,其中两组所述紫外消毒灯分别设置于所述升降机构3两侧。升降机构3将消杀机器人的高度提升后,紫外消毒设备的位置在消杀机器人底盘2的正下方,用于给消杀机器人底盘2及轮毂7进行无死角消杀,紫外消毒设备可选择为uvc紫外灯,紫外线按照生物效应的差异,一般分为uva、uvb、uvc和uvd四个波段,其中uvc波长200nm-275nm为短波灭菌紫外线,具有消毒的作用,具有高效、无二次污染快速彻底的消毒效果。它是通过破坏细菌病毒细胞中的dna来达到细胞dna或rna链的断裂、核酸和蛋白的交联破裂造成细菌病毒的死亡来达到消毒的目的。
32.参阅图3、图5,所述清洁机构4包括驱动单元41和清洁单元42,所述驱动单元41与所述清洁单元42滚动设置以带动所述清洁单元42转动角度。所述驱动单元41包括第二驱动装置411、主动件412、第一从动件413、第二从动件414和导向组件415,所述第二驱动装置411输出端固定有主动件412,所述主动件412与第一从动件413相互啮合,所述第一从动件413与第二从动件414相互啮合,所述第二从动件414与所述清洁单元42固定连接以改变所述清洁单元42的转动角度,所述第一从动件413与所述固定座6之间固定有导向组件415。所述清洁单元42包括旋转座421、固定架422和清洁刷423,固定架422固定于所述固定座6上,旋转座421转动设置于所述固定架422上,所述旋转座421与所述第二从动件414固定连接,所述清洁刷423与所述旋转座421固定连接。所述导向组件415包括导向轨416和与所述导向轨416滑动设置的滑块417,所述导向轨416与固定座6固定连接,所述滑块417与所述第一从动件413固定连接。第二驱动装置411可选择为电机,主动件412与第二从动件414可选择为齿轮,第一从动件413可选择为齿条,具体工作过程如下:第二驱动装置411启动,主动件412转动,由于主动件412与第一从动件413啮合,于是,第一从动件413在导向单元的作用下沿着固定座6进行移动,移动过程中,第二从动件414与第一从动件413啮合,第二从动件414转动,由于第二从动件414与清洁旋转座421固定连接,因此旋转座421沿固定架422转动,转动时便改变清洁刷423的位置,使得其从水平放置逐步旋转到竖直方向,清洁刷423朝向机器人的轮毂7设置,方便后续对轮毂7进行清洁,清洁刷423与轮毂7接触对其某个部位进行清洁,进一步,通过控制消杀机器人的轮毂7电机驱动轮毂7转动,清洁刷423便对轮毂7的不同位置进行清洁,实现全面清洁,不留死角。该清洁单元42在进行消杀状态时从固定座6中旋转出来与轮毂7相接触,对其进行清洁,在非消杀清洁时,清洁单元42收纳进固定座6中,节省空间。
33.参阅图5,还包括收集单元8,所述收集单元8包括负压设备81和收集盒82,所述负压设备81连通有收集盒82,所述收集盒82连通向旋转座421,所述旋转座421上固定清洁刷423的一侧开设有若干个负压吸尘孔83。负压设备81可选择为涡流风扇或者风机,经过清洁单元42清理后的灰尘,在负压设备81的作用下,灰尘由负压吸尘孔83进入收集盒82中储存,采用收集单元8将清洁轮毂7时产生的灰尘进行及时储存,避免在清洁底盘2时粉尘到处飞扬。
34.还包括设置于控制盒内部的主控系统,与第一驱动装置31、第二驱动装置411、负压设备81电性连接,用于控制其的启动与停止,进而控制整个消杀清洁装置的动作流程。主控系统辅助消杀机器人在清洁消杀装置上的定位以及与云服务端进行通讯。
35.对移动消杀机器人1底盘2进行清洁消杀的方法如下:
36.步骤s1:消杀机器人获取当前环境地图,消杀机器人搜索消杀清洁装置并将消杀清洁装置的位置标记在环境地图中。该步骤建立多个消杀机器人与消杀清洁装置的通讯连接,在消杀机器人需要进行消杀清洁时,消杀机器人根据消杀清洁装置在地图中的位置对消杀清洁装置进行清洁。
37.步骤s2:消杀机器人接收云服务端的消毒指令,消杀机器人收到消毒指令后规划对消杀路径与消杀时间,并设置需要对底盘2进行消杀清洁的时间值,当消杀过程达到需要对底盘2进行消杀清洁的设置时间值时,消杀机器人给云服务端发送去消杀清洁的需求。消杀机器人根据云服务端的指示进行消杀任务,达到提前设置的需要进行消杀清洁的时间时,消杀机器人向云服务端发送去消杀清洁的需求,为进行对机器人底盘2进行消杀清洁做准备。
38.步骤s3:云服务端获得需求后给消杀清洁装置发送信息以获取消杀清洁装置当前状态,判断消杀清洁装置目前是否在工作;若消杀清洁装置没有工作任务,则云服务端通知消杀机器人去执行消杀清洁计划;若消杀清洁装置有工作任务在执行,则云服务端通知消杀机器人暂停进行消杀清洁计划,并进入排对等待序列,返回步骤s2。对于未执行消杀工作任务的消杀机器人,云服务端通知其去执行底盘2的消杀清洁计划,对于正在执行消杀工作任务的消杀机器人,云服务端给消杀机器人发送暂停消杀清洁计划的指令,进入排队序列,进行等待,等待下一次消杀机器人给云服务端发送去消杀清洁的需求,依次循环。实现对消杀机器人进行分类,并且根据分类对其执行的任务进行区分,使得消杀清洁装置与消杀机器人可以实现一对多的工作模式,提高效率。
39.步骤s4:消杀清洁完成后,消杀清洁设备恢复最初状态,消杀机器人也回到最初位置,等待下一个消杀任务的来临。
40.进一步地,所述步骤s3中的消杀清洁计划包括识别消杀清洁装置位置、运动至消杀清洁装置的固定座6上和实现对消杀机器人的底盘2消杀清洁任务。
41.所述识别消杀清洁装置位置包括消杀机器人到达消杀清洁装置附近,通过自身激光雷达扫描周围环境,识别消杀清洁装置上的辅助定位识别结构,根据其结构数据判断消杀清洁装置的具体位置,并调整消杀机器人向消杀清洁装置靠近。消杀机器人在进行消杀清洁任务时,朝向固定座6行进的过程中,根据消杀机器人上的激光雷达扫描周围环境,辅助识别定位块具有长、宽和高的数据信息,激光雷达扫描其结构信息并向消杀机器人发送信息,消杀机器人向消杀清洁装置处靠近。
42.所述运动至消杀清洁装置的固定座6上包括消杀机器人向消杀清洁装置靠近时,消杀清洁装置上的两侧红外定位传感器10纠正消杀机器人的位置,使消杀机器人在两个传感器中间的位置向消杀清洁装置靠近。红外定位传感器10设置有两个并且二者中央设置有辅助定位识别结构,将消杀机器人的移动空间限制起来并且不断对其位置进行纠正。
43.所述实现对消杀机器人的底盘2消杀清洁任务包括消杀机器人到达消杀清洁装置上方后,主控系统首先控制升降机构3将消杀机器人托起,使其轮毂7脱离地面,然后消杀机
器人控制轮毂7电机转动,此时消杀清洁装置主控系统控制消毒机构5,将紫外消毒设备启动,通过紫外消毒设备对整个消杀机器人底盘2进行消杀,然后主控系统再次控制清洁机构4和收集单元8,使其对电机轮毂7进行清洁和收集清洁后的灰尘,清洁机构4通过主控系统的控制,通过驱动单元41与导向组件415的配合将藏在装置内部的清洁单元42旋转出来,使清洁刷423与电机轮毂7接触,然后清洁消杀装置给消杀机器人发指令,使其电机轮毂7转动,与清洁刷423之间摩擦,进行清洁。将移动消杀机器人1,云服务端,自动消杀清洁装置三者连成一个整体,以实现移动消杀机器人1底部的智能化清洁。填补了现有技术中没有专业对移动消杀机器人1底部自动清洁装置的空白,使消杀机器人的底盘2清洁消杀工作也实现了无人化。
44.上述技术方案仅体现了本实用新型技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本实用新型的原理,属于本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
