一种xy轴预定位传送装置
技术领域
1.本实用新型涉及电池包印刷产线运输装置相关技术领域,具体涉及一种xy轴预定位传送装置。
背景技术:
2.现有的电池包印刷产线中,发料机发出的待打印产品需要经过视觉定位后再进行打印。由于发料机发出的待打印产品在流道上摆放不够整齐,导致视觉定位系统定位时间长,甚至待打印产品不能完全进入视觉定位系统的相机拍摄范围内,进一步降低了视觉定位的效率。因此需要在视觉定位之前对待打印产品进行xy轴的预定位。
3.现有的xy轴预定位装置采用气缸实现,针对不同大小的产品需要手动调整定位机构的位置,手动调整的话无法保证定位机构能够对称居中,最终导致产品中心偏移。
技术实现要素:
4.为了解决上述内容中提到的问题,本实用新型提供了一种xy轴预定位传送装置,其能够根据产品尺寸,自动控制定位机构对产品进行预定位,保证能够对称居中,并且能够将产品传送至准确的位置,提高了后续视觉定位的效率。
5.其技术方案是这样的:
6.一种xy轴预定位传送装置,其特征在于:其包括x轴传送机构、y轴定位机构和控制器,所述x轴传送机构和y轴定位机构相垂直交叉配合;
7.所述x轴传送机构包括x轴伺服电机、传送带机构和第一位置感应器;所述x轴伺服电机与传送带机构连接,用于驱动传送带机构传送产品;所述第一位置感应器安装在传送带机构中,用于检测产品的位置;
8.所述y轴定位机构包括y轴伺服电机、安装板、连接块、导轨、第二位置感应器和定位组件;所述y轴伺服电机安装在安装板的下方,其输出轴贯穿安装板后与连接块固定连接,所述连接块的两端分别通过关节轴承连接对应的定位组件,两个所述定位组件分别滑动安装在导轨上,两个所述导轨均固定安装在安装板上;所述定位组件上安装有感应片,所述安装板上安装有第二位置感应器,所述感应片与第二位置感应器相配合,所述第二位置感应器用于检测定位组件的位置;
9.所述控制器分别与x轴伺服电机、第一位置感应器、y轴伺服电机和第二位置感应器电性连接,还用于设置产品的尺寸、第一传送距离和第二传送距离。
10.进一步的,所述定位组件包括底座、支撑杆和限位杆,所述底座滑动安装在导轨上,所述支撑杆固定在底座上,所述限位杆水平固定在支撑杆上。
11.进一步的,所述限位杆上安装有水平设置的滚轮。
12.进一步的,所述第二位置感应器的两侧还分别安装有第三位置感应器和第四位置感应器,所述感应片与第三位置感应器和第四位置感应器相配合。
13.进一步的,所述x轴伺服电机通过同步带和同步轮连接传送带机构的驱动轴。
14.进一步的,所述第一位置感应器、第二位置感应器、第三位置感应器和第四位置感应器具体为光电感应器。
15.本实用新型的有益效果为:
16.1、本实用新型通过x轴伺服电机驱动传送带机构以正常速度传送产品,当产品达到预定位工位时被第一位置感应器检测到,第一位置感应器发送信息给控制器;控制器根据当前设置的产品尺寸控制y轴伺服电机的输出轴旋转相应的角度,进而带动连接块,连接块通过关节轴承带动两端的定位组件向内移动相应的距离,同时控制器根据当前设置的第一传送距离控制x轴伺服电机驱动传送带机构以较低的速度将产品向前移动相应的距离后停下,在此过程中,产品一边被传送带机构传送至x轴的预设位置,一边被定位组件的限位杆在y轴方向上进行定位,并且被限位杆将其位置摆正;当后续视觉定位系统需要产品时,控制器根据当前设置的第二传送距离控制x轴伺服电机驱动传送带机构以正常速度将产品向前移动相应的距离后停下,此时产品位于准确位置,便于视觉定位系统进行定位;进而本装置实现了根据产品尺寸,自动控制定位机构对产品进行预定位,保证能够对称居中,并且能够将产品传送至准确的位置,提高了后续视觉定位的效率。
17.2、本实用新型通过在限位杆上安装水平设置的滚轮,避免了产品在y轴方向上的定位过程中其外观被磨损的问题,保证了产品质量。
18.3、本实用新型通过在定位组件上安装感应片,在安装板上安装第二位置感应器,来检测在预定位开始前,y轴伺服电机是否将定位组件复位至原点,进而保证了预定位的准确性;进一步的,在第二位置感应器的两侧分别安装有第三位置感应器和第四位置感应器,来检测定位组件是否移动到了极点,起到了限位作用,保护了y轴伺服电机,保证了装置的正常工作。
附图说明
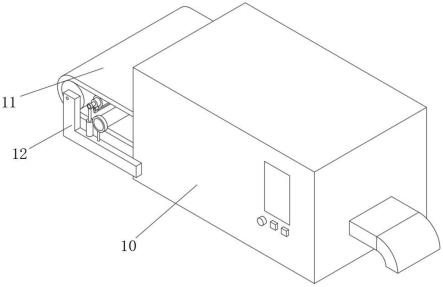
19.图1为本实用新型的整体结构示意图。
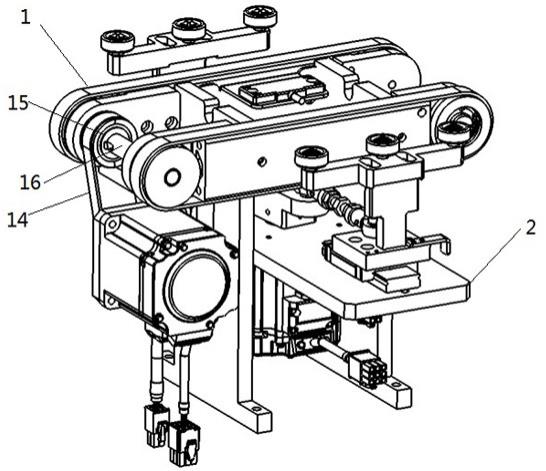
20.图2为本实用新型中x轴传送机构的结构示意图。
21.图3为本实用新型中y轴定位机构的结构示意图。
具体实施方式
22.下面结合实施例对本实用新型做进一步的描述。
23.以下实施例用于说明本实用新型,但不能用来限制本实用新型的保护范围。实施例中的条件可以根据具体条件做进一步的调整,在本实用新型的构思前提下对本实用新型的方法简单改进都属于本实用新型要求保护的范围。
24.如图1-3所示,一种xy轴预定位传送装置,其包括x轴传送机构1、y轴定位机构2和控制器(图中未作标示),所述x轴传送机构1和y轴定位机构2相垂直交叉配合。
25.所述x轴传送机构1包括x轴伺服电机11、传送带机构12和第一位置感应器13;所述x轴伺服电机11通过同步带14和同步轮15连接传送带机构12的驱动轴16,用于驱动传送带机构12传送产品;所述第一位置感应器13安装在传送带机构12中,用于检测产品的位置。
26.所述y轴定位机构2包括y轴伺服电机21、安装板22、连接块23、导轨24、第二位置感应器25和定位组件20;所述y轴伺服电机21安装在安装板22的下方,其输出轴(图中未作标
示)贯穿安装板22后与连接块23固定连接,所述连接块23的两端分别通过关节轴承26连接对应的定位组件20,两个所述定位组件20分别滑动安装在对应的导轨24上,两个所述导轨24均固定安装在安装板22上;所述定位组件20上安装有感应片27,所述安装板22上安装有第二位置感应器25,所述感应片27与第二位置感应器25相配合,所述第二位置感应器25用于检测定位组件20的位置,确认其是否回复至原点。所述定位组件20包括底座201、支撑杆202和限位杆203,所述底座201滑动安装在导轨24上,所述支撑杆202固定在底座201上,所述限位杆203水平固定在支撑杆202上。所述限位杆203上安装有水平设置的滚轮204,避免了产品在y轴方向上的定位过程中其外观被磨损的问题。所述第二位置感应器25的两侧还分别安装有第三位置感应器28和第四位置感应器29,所述感应片27与第三位置感应器28和第四位置感应器29相配合,来检测定位组件是否移动到了极点(即极限位置),起到了限位作用。所述第一位置感应器13、第二位置感应器25、第三位置感应器28和第四位置感应器29具体为光电感应器。
27.所述控制器分别与x轴伺服电机11、第一位置感应器13、y轴伺服电机21和第二位置感应器25、第三位置感应器28和第四位置感应器29电性连接,还用于设置产品的尺寸、第一传送距离和第二传送距离。所述控制器的程序可通过本领域内的常规编程实现,在此不做赘述。
28.本实用新型的工作原理:首先通过第二位置感应器25检测到感应片27,来确认在预定位开始前,y轴伺服电机21已经将定位组件20复位至原点;然后通过x轴伺服电机11驱动传送带机构12以正常速度(此处的正常速度,用户可根据实际需要通过控制器设置)传送产品,当产品达到预定位工位时被第一位置感应器13检测到,第一位置感应器13发送信息给控制器;控制器根据当前设置的产品尺寸控制y轴伺服电机21的输出轴旋转相应的角度,进而带动连接块23,连接块23通过关节轴承26带动两端的定位组件20向内移动相应的距离,同时控制器根据当前设置的第一传送距离控制x轴伺服电机11驱动传送带机构12以较低的速度(此处的速度,用户可根据实际需要通过控制器设置)将产品向前移动相应的距离后停下,在此过程中,产品一边被传送带机构12传送至x轴的预设位置,一边被定位组件20的限位杆203在y轴方向上进行定位,并且被限位杆203将其位置摆正;当后续视觉定位系统需要产品时,控制器根据当前设置的第二传送距离控制x轴伺服电机11驱动传送带机构12以正常速度将产品向前移动相应的距离后停下,此时产品位于准确位置,便于视觉定位系统进行定位。
29.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。