1.本发明涉及包装运输技术领域,尤其涉及一种自动换托机。
背景技术:
2.玻瓶药品在生产过程中常常需要采用不同的仪器设备检测,需要经过多次周转和交换不同的吸塑托盘,每一个吸塑托盘需要装多瓶的玻璃瓶药品,由于吸塑托盘的特殊性,在交换吸塑托盘时需要对吸塑托盘进行精确定位,同时吸塑托盘质量轻而且易损坏,稍有偏差就很容易导致换托失败甚至将吸塑托盘弄坏。
3.而现有的技术主要是采用人工进行换托,即将位于原吸塑托盘上的玻瓶药品逐一转移到新的吸塑托盘上,这种方式工作效率低、劳动强度大,同时对产品的损伤程度大,损伤率高达5%-6%。
4.因此,如何精确地完成玻瓶的换托,提高玻瓶的换托效率成为本领域技术人员需要解决的技术问题。
技术实现要素:
5.为了解决上述现有技术中存在的不足,本发明提供一种自动换托机,其能提高作业效率,减轻人工劳动强度且能减少对产品的损伤。
6.本发明解决上述技术问题所采用的技术方案为:一种自动换托机,包括机架;转盘,可转动设置在所述机架上,用于周向输送第一吸塑托盘;分离支架,固定在所述机架上,且位于所述转盘的上方,所述分离支架上设置有至少一个用于放置第一吸塑托盘的分离料仓,所述分离料仓上下贯穿设置;拆垛装置,设置在所述分离支架上,用于将位于所述分离料仓底部的第一吸塑托盘转移到所述转盘上;基座,位于所述机架的一侧,所述基座上设置有用于传输第二吸塑托盘的滚筒输送线,所述基座上由左至右分为拆垛区域、放料区域和码垛区域;第一夹持顶升机构,设置在所述基座上,用于夹持位于所述拆垛区域内的二层之上的第二吸塑托盘,以使得底层的第二吸塑托盘随所述滚筒输送线被移送至所述放料区域;机械手机构,设置在所述基座上,用于抓取位于所述转盘上的第一吸塑托盘中的玻瓶药品,并转移至位于所述放料区域内的第二吸塑托盘中;第二夹持顶升机构,设置在所述基座上,用于将由所述放料区域移送至所述码垛区域的第二吸塑托盘逐个向上叠放;收集支架,固定在所述机架上,且位于所述转盘的上方,所述收集支架上设置有至少一个用于放置第一吸塑托盘的收集料仓,所述收集料仓上下贯穿设置;码垛装置,设置在所述收集支架上,用于将由所述转盘移送的第一吸塑托盘逐个
叠放到所述收集料仓内。
7.优选地,所述分离支架包括底部框架、两根立杆和两根横杆,所述底部框架固定在所述机架上,两根所述立杆间隔固定在所述底部框架上,两根所述横杆上下间隔固定在所述两根立杆之间,所述分离料仓的个数为两个,每个所述分离料仓包括第一托板和第二托板,所述第一托板和所述第二托板之间形成有用于叠放第一吸塑托盘的叠放空间,所述第一托板的侧壁上连接有上下分布的两根第一连接杆,所述第一连接杆分别固定在对应所述横杆上,所述第二托板的侧壁上连接有上下分布的两根第二连接杆,所述第二连接杆分别固定在对应所述横杆上。该结构中,分离支架采用轻量化设计,分离支架包括底部框架、两根立杆和两根横杆,底部框架、两根立杆和两根横杆分别采用铝型材或者碳钢喷漆,从而保证结构的稳定性;分离料仓的个数为两个,从而可以一次性容纳多个第一吸塑托盘,每个叠放空间内一般可叠加8-10层的第一吸塑托盘,通过人工定时补料,以保证系统的正常运行,分离料仓包括相对设置的第一托板和第二托板,第一托板的两侧弯折设置有第一翼板,第二托板的两侧弯折设置有第二翼板,这样使得叠放空间具有缝隙,在起到容纳第一吸塑托盘的同时,也能够直观观察叠放空间的情况,同时出现卡料情况时,人工也能够快速进行干预;第一托板通过第一连接杆与横杆相固定,第一连接杆的一端勾在横杆上,并且采用螺栓固定的方式与横杆相连接,同样,第二托板通过第二连接杆与横杆相固定,第二连接杆的一端勾在横杆上,并且采用螺栓固定的方式与横杆相连接,这样能够调节第一托板与第二托板之间的距离,形成间距可调的叠放空间,以此适配不同规格的第一吸塑托盘。
8.优选地,所述拆垛装置包括第一升降板、第一升降气缸和第一夹紧机构,所述第一升降气缸固定在所述底部框架上,所述第一升降气缸的活塞杆固定在所述第一升降板的底部,所述第一升降板和所述底部框架之间还设有两根第一导向轴,两根所述第一导向轴位于所述第一升降气缸的两侧,所述第一夹紧机构包括第一夹紧气缸和第二夹紧气缸,所述第一夹紧气缸水平固定在所述第一升降板的一侧,所述第一夹紧气缸的活塞杆上固定有第一移动板,所述第一移动板上固定有两个间隔分布的第一夹板,所述第二夹紧气缸水平固定在所述第一升降板的另一侧,所述第二夹紧气缸的活塞杆上固定有第二移动板,所述第二移动板上固定有两个间隔分布的第二夹板,其中位于左侧的第二夹板处于两块第一夹板之间,使得左侧的第一夹板与左侧的第二夹板形成一用于夹紧左侧分离料仓内的第一吸塑托盘的第一夹紧空间,右侧的第一夹板与右侧的第二夹板形成一用于夹紧右侧分离料仓内的第一吸塑托盘的第二夹紧空间。该结构中,第一升降气缸用于带动第一夹紧机构向上移动,运动过程较为平稳,且易于控制,两根第一导向轴的设置则对第一升降板的移动起到导向作用;第一夹紧气缸和第二夹紧气缸相对设置,且同步进行运动,第一夹紧气缸上固定有第一移动板,位于第一移动板上的两个第一夹板能随第一夹紧气缸的活塞杆同步运动,两个第一夹板分别位于左侧分离料仓的左右两侧,而第二夹紧气缸上固定有第二移动板,位于第二移动板上的两个第二夹板能随第二夹紧气缸的活塞杆同步运动,两个第二夹板分别位于右侧分离料仓的左右两侧,当需要夹紧二层之上的全部第一吸塑托盘时,第一夹紧气缸的活塞杆向右伸出,使得两块第一夹板向右运动,而第二夹紧气缸的活塞杆向左伸出,使得两块第二夹板向左运动,这样相对的第一夹板和第二夹板相互靠近,起到夹紧第一吸塑托盘的作用,随后在升降气缸的带动下,带动二层之上的第一吸塑托盘向上移动,实现与底部第一吸塑托盘分离的目的,而当第一夹紧气缸和第二夹紧气缸缩回时,相对的第一夹板
和第二夹板相互远离,起到松开第一吸塑托盘的作用,之后该第一吸塑托盘随转盘的转动移动至下一个工位。
9.优选地,位于下方的所述横杆上设置有两个用于下压底层第一吸塑托盘的压边机构,每个所述压边机构包括压边气缸、连接板和压板,所述压边气缸通过一加固板水平固定在位于下方的所述横杆上,所述连接板固定在所述压边气缸的活塞上,所述压板水平连接在所述连接板上,且用于与最底下的吸塑托盘的两侧相接触。该结构中,压边机构的设置是为了能够在底层第一吸塑托盘与其接邻的第一吸塑托盘分离时,更容易进行分离,其包括压边气缸、连接板和压板,在顶升气缸工作同时,压边气缸也同步工作,其驱动连接板以及压板靠近吸塑托盘,压板具有一与第一吸塑托盘相适配的避让空间,当其靠近第一吸塑托盘时,避开第一吸塑托盘的主体,压住第一吸塑托盘的边角,从而避免随其它第一吸塑托盘一起移动的目的。
10.优选地,所述拆垛区域与所述放料区域之间设置有第一限制机构,所述第一限制机构用于阻碍底层的第二吸塑托盘向所述放料区域移动,所述放料区域与所述码垛区域之间设置有第二限制机构,所述第二限制机构用于阻碍第二吸塑托盘向所述放料区域移动,所述码垛区域的出口设置有第三限制机构,所述第三限制机构用于阻碍第二吸塑托盘向所述码垛区域的出口移动。该结构中,拆垛区域内叠放有空的第二吸塑托盘,第一限制机构用于阻碍底层的第二吸塑托盘向所述放料区域移动,以将第二吸塑托盘截留在拆垛区域内,当第一限制机构解除限制,底层的第二吸塑托盘能够随滚筒输送线传输至放料区域内,并被第二限制机构所截留,以方便机械手机构进行放料,待放完料后,第二限制机构解除限制,放满料的第二吸塑托盘随滚筒输送线传输至码垛区域内,并被第三限制机构限制在码垛区域内,以便进行叠料,待堆积到一定程度后,人工取下多层第二吸塑托盘,大大提高了作业效率,整个过程自动化程度较高,无需人工时刻看管。
11.优选地,所述第一限制机构包括第一限制气缸,所述第一限制气缸通过第一安装座固定在所述基座上,且位于所述滚筒输送线的下方,所述第一限制气缸的活塞杆上固定有第一挡料板,当所述第一限制气缸驱动所述第一挡料板伸出所述滚筒输送线上时,所述第一挡料板与吸塑托盘接触;该结构中,第一限制气缸固定在基座上,正常情况下,第一限制气缸与第一挡料板位于滚筒输送线的下方,这样不影响滚筒输送线的正常运行,当需要进行挡料时,第一限制气缸驱动第一挡料板向上运动,使第一挡料板伸出滚筒输送线,这样第二吸塑托盘接触到第一挡料板后无法继续向右移动,实现挡料的目的;所述第二限制机构包括第二限制气缸,所述第二限制气缸通过第二安装座固定在所述基座上,且位于所述滚筒输送线的下方,所述第二限制气缸的活塞杆上固定有第二挡料板,当所述第二限制气缸驱动所述第二挡料板伸出所述滚筒输送线上时,所述第二挡料板与吸塑托盘接触;该结构中,第二限制气缸固定在基座上,正常情况下,第二限制气缸与第二挡料板位于滚筒输送线的下方,这样不影响滚筒输送线的正常运行,当需要进行挡料时,第二限制气缸驱动第二挡料板向上运动,使第二挡料板伸出滚筒输送线,这样第二吸塑托盘接触到第二挡料板后无法继续向右移动,被截留在放料区域内,实现挡料的目的;所述第三限制机构包括第三限制气缸,所述第三限制气缸通过第三安装座固定在所述基座上,且位于所述滚筒输送线的下方,所述第三限制气缸的活塞杆上固定有第三挡料板,当所述第三限制气缸驱动所述第三挡料板伸出所述滚筒输送线上时,所述第三挡料
板与吸塑托盘接触。该结构中,第三限制气缸固定在基座上,正常情况下,第三限制气缸与第三挡料板位于滚筒输送线的下方,这样不影响滚筒输送线的正常运行,当需要进行挡料时,第三限制气缸驱动第三挡料板向上运动,使第三挡料板伸出滚筒输送线,这样第二吸塑托盘接触到第三挡料板后无法继续向右移动,被截留在码垛区域内,实现挡料的目的。
12.优选地,所述第一夹持顶升机构包括两个第一顶升气缸和两个第一夹持气缸,两个所述第一顶升气缸分别竖直设置在所述拆垛区域的前后两侧,每个所述第一顶升气缸的活塞杆上固定有第一顶升板,所述第一顶升板与所述基座之间设置有第一导向单元,所述第一夹持气缸水平固定在对应所述第一顶升板上,每个所述第一夹持气缸的活塞杆上固定有第一夹持板,两块所述第一夹持板之间形成第一夹持空间;该结构中,第一夹持顶升机构包括两个第一顶升气缸和两个第一夹持气缸,第一顶升气缸采用三位气缸结构,当第一顶升气缸带动对应第一夹持气缸向上运动至预设位置后,第一夹持气缸驱动第一夹持板运动,使两块第一夹持板相互靠近,从而夹紧位于二层的第二吸塑托盘,之后,第一顶升气缸继续运动,带动二层以上的第二吸塑托盘与底层的第二吸塑托盘分离,第一限制机构接触限制,使位于底层的吸塑托盘由滚筒输送线移走,随后第一顶升气缸带动整垛第二吸塑托盘落下,二层的第二吸塑托盘变为底层第二吸塑托盘,等待下一次拆盘分离;所述第二夹持顶升机构包括两个第二顶升气缸和两个第二夹持气缸,两个所述第二顶升气缸分别竖直设置在所述码垛区域的前后两侧,每个所述第二顶升气缸的活塞杆上固定有第二顶升板,所述第二顶升板与所述基座之间设置有第二导向单元,所述第二夹持气缸水平固定在对应所述第二顶升板上,每个所述第二夹持气缸的活塞杆上固定有第二夹持板,两块所述第二夹持板之间形成第二夹持空间。该结构中,第二顶升机构包括两个第二顶升气缸和两个第二夹持气缸,第二顶升气缸采用三位气缸结构,当第二顶升气缸带动对应第二夹持气缸向上运动至预设位置后,第二夹持气缸驱动第二夹持板运动,使两块第二夹持板相互靠近,从而夹紧位于底层的第二吸塑托盘,之后,第二顶升气缸继续运动,带动整垛第二吸塑托盘向上移动,这样最底下第二吸塑托盘与滚筒输送线之间留有空隙,以便于下一个第二吸塑托盘进行叠放。
13.优选地,所述机械手机构包括机械手支架、第一直线模组、第二直线模组、第三直线模组和多个气爪单元,所述机械手支架固定在所述放料区域的一侧,所述第一直线模组固定在所述机械手支架上,且用于驱动所述第二直线模组左右移动,所述第二直线模组的滑块上连接有所述第三直线模组,以带动所述第三直线模组前后移动,所述第三直线模组的滑块上连接有夹爪安装板,以带动所述夹爪安装板上下移动,多个所述气爪单元前后间隔设置在所述夹爪安装板上。该结构中,第一直线模组、第二直线模组、第三直线模组的设置使得夹爪安装板具有前后、左右以及上下方向的自由度,较为灵活,而多个气爪单元前后间隔固定在夹爪安装板上,由此一次性能够夹取多个玻瓶药品,并且能有序放置到第二吸塑托盘上。
14.优选地,所述收集支架上设置有两个所述收集料仓,所述码垛装置包括包括第二升降板、第二升降气缸和第二夹紧机构,所述第二升降气缸固定在所述收集支架的底部,所述第二升降气缸的活塞杆固定在所述第二升降板的底部,所述第二升降板和所述底部框架之间还设有两根第二导向轴,两根所述第二导向轴位于所述第二升降气缸的两侧,所述第二夹紧机构包括第三夹紧气缸和第四夹紧气缸,所述第三夹紧气缸水平固定在所述第二升
降板的一侧,所述第三夹紧气缸的活塞杆上固定有第三移动板,所述第三移动板上固定有两个间隔分布的第三夹板,所述第四夹紧气缸水平固定在所述第二升降板的另一侧,所述第四夹紧气缸的活塞杆上固定有第四移动板,所述第四移动板上固定有两个间隔分布的第四夹板,其中位于左侧的第四夹板处于两块第三夹板之间,使得左侧的第三夹板与左侧的第四夹板形成一用于夹紧左侧收集料仓内的第一吸塑托盘的第三夹紧空间,右侧的第三夹板与右侧的第四夹板形成一用于夹紧右侧收集料仓内的第一吸塑托盘的第四夹紧空间。该结构中,第三夹紧气缸和第四夹紧气缸相对设置,且同步进行运动,第三夹紧气缸上固定有第三移动板,位于第三移动板上的两个第三夹板能随第三夹紧气缸的活塞杆同步运动,两个第三夹板分别位于左侧收集料仓的左右两侧,而第四夹紧气缸上固定有第四移动板,位于第四移动板上的两个第四夹板能随第四夹紧气缸的活塞杆同步运动,两个第四夹板分别位于右侧收集料仓的左右两侧,当需要进行码垛时,第三夹紧气缸的活塞杆向右伸出,使得两块第三夹板向右运动,而第四夹紧气缸的活塞杆向左伸出,使得两块第四夹板向左运动,这样相对的第三夹板和第四夹板相互靠近,起到夹紧第二吸塑托盘的作用,随后在第二升降气缸的带动下,带动第二吸塑托盘向收集料仓内移动,实现与转盘分离的目的,而当下一个第二吸塑托盘被移送至收集料仓下时,具体而言是移动到底层的第二吸塑托盘的下方,这样第三夹紧气缸和第四夹紧气缸缩回时,底层第二吸塑托盘落到刚移送的第二吸塑托盘上,实现叠料的目的,接着第二升降气缸缩回,带动第二升降板下移,使第三夹紧气缸和第四夹紧气缸对准目前位于底层的第二吸塑托盘,重复上述动作,实现夹紧向上移送的目的。
15.优选地,所述转盘通过凸轮分割器设置在所述机架上,所述转盘上周向设置有三块定位板,每块所述定位板上设置有两个与第一吸塑托盘形状相适配的定位槽。该结构中,凸轮分割器为现有技术,其带动转盘间歇转动,三块定位板分别对应不同的工位,每块定位板上设置的定位槽与第一吸塑托盘相适配,从而在转动过程中,第一吸塑托盘与转盘不易分离。
16.与现有技术相比,本发明的优点在于:转盘的设置用于带动第一吸塑托盘周向转动,其通过凸轮分割器进行驱动,以此将第一吸塑托盘转移到不同的工位;分离支架固定在机架上,其上设置有分离料仓,分离料仓供第一吸塑托盘叠放码垛;拆垛装置用于将位于分离料仓底部的第一吸塑托盘转移到转盘上,以此完成分离步骤,随后转盘转动,带动留在转盘上的第一吸塑托盘转动,当到达下一个工位后,以供机械手机构进行夹取;基座由左至右分为拆垛区域、放料区域和码垛区域,三个区域之间通过滚筒输送线进行输料,保证了吸塑托盘的平稳输送;第一夹持顶升机构的设置用于夹紧二层之上的吸塑托盘,并带动其向上运动,以便分离出最底下的第二吸塑托盘,在滚筒输送线带动下向右移动至放料区域,机械手机构能将位于转盘上的第一吸塑托盘上的玻瓶药品转移到位于放料区域内的第二吸塑托盘上;第二夹持顶升机构的设置用于逐个向上叠放已经放好料的第二吸塑托盘,以实现自动叠放的目的,这样无需人工时刻看管,待堆叠到合适层数后再人工一次性取出,较为便捷;收集支架上开设的收集料仓用于供取完料的第一吸塑托盘叠放;码垛装置的设置用于将由转盘移送的第一吸塑托盘逐个叠放到收集料仓内,待堆叠到一定程度后,人工取出;本发明能提高作业效率,减轻人工劳动强度且能减少对产品的损伤。
附图说明
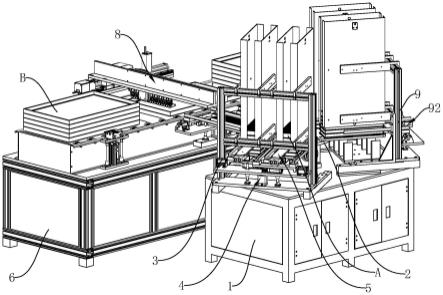
17.图1为本发明的立体结构示意图;图2为本发明中机架与转盘配合时的立体结构示意图;图3为本发明中机架与分离支架配合时的立体结构示意图;图4为本发明中分离支架的立体结构示意图;图5为本发明中夹紧机构的立体结构示意图;图6为本发明中压边机构的立体结构示意图;图7为本发明中滚筒输送线输送第二吸塑托盘时的立体结构示意图;图8为本发明中基座的主视图;图9为本发明中基座的立体结构示意图;图10为本发明中第一夹持顶升机构的立体结构示意图;图11为本发明中机械手机构的立体结构示意图;图12为本发明中第三限制机构的立体结构示意图;图13为本发明中机架与收集支架配合时的立体结构示意图;图14为本发明中收集支架的立体结构示意图。
具体实施方式
18.以下结合附图和实施例对本发明作进一步详细说明,但不作为对本发明的限定。
19.实施例一:如图所示,一种自动换托机,包括机架1;转盘2,可转动设置在机架1上,用于周向输送第一吸塑托盘a;分离支架3,固定在机架1上,且位于转盘2的上方,分离支架3上设置有至少一个用于放置第一吸塑托盘a的分离料仓34,分离料仓34上下贯穿设置;拆垛装置4,设置在分离支架3上,用于将位于分离料仓34底部的第一吸塑托盘a转移到转盘2上;基座6,位于机架1的一侧,基座6上设置有用于传输第二吸塑托盘b的滚筒输送线60,基座6上由左至右分为拆垛区域61、放料区域62和码垛区域63;第一夹持顶升机构71,设置在基座6上,用于夹持位于拆垛区域61内的二层之上的第二吸塑托盘b,以使得底层的第二吸塑托盘b随滚筒输送线60被移送至放料区域62;机械手机构8,设置在基座6上,用于抓取位于转盘2上的第一吸塑托盘a中的玻瓶药品,并转移至位于放料区域62内的第二吸塑托盘b中;第二夹持顶升机构72,设置在基座6上,用于将由放料区域62移送至码垛区域63的第二吸塑托盘b逐个向上叠放;收集支架9,固定在机架1上,且位于转盘2的上方,收集支架9上设置有至少一个用于放置第一吸塑托盘a的收集料仓91,收集料仓91上下贯穿设置;码垛装置92,设置在收集支架9上,用于将由转盘2移送的第一吸塑托盘a逐个叠放到收集料仓91内。
20.本装置在使用时,首先人工将带有玻瓶药品的第一吸塑托盘a放置到分离支架3的分离料仓34内,将多个空的第二吸塑托盘b叠放到拆垛区域61内,之后,拆垛装置4进行工
作,将位于底层的第一吸塑托盘a由分离料仓34转移到转盘2中,转盘2进行转动,将盛满料的第一吸塑托盘a转移到下一工位,与此同时,第一夹持顶升机构71将位于底层的第二吸塑托盘b下放到滚筒输送线60上,由滚筒输送线60移送至放料区域62中,准备进入到放料步骤;进行转移放料时,机械手机构8抓取位于转盘2上的第一吸塑托盘a中的玻瓶药品,并转移至位于放料区域62内的第二吸塑托盘b中,进行有序堆放,待第一吸塑托盘a内的玻瓶药品夹取完毕后,转盘2继续转动,将空的第一吸塑托盘a转移至下一工位,而满的第一吸塑托盘a则继续转移到待夹取工位;空的第一吸塑托盘a转移至下一工位后,即转移到收集料仓91的下方,码垛装置92将该第一吸塑托盘a逐个叠放到收集料仓91内,完成一次循环,而第二吸塑托盘b堆满料后,随滚筒输送线60移动码垛区域63内,由第二夹持顶升机构72将第二吸塑托盘b逐个向上叠放,待堆满到一定程度后,人工取出。
21.实施例二:如图所示,与实施例一不同的是,分离支架3包括底部框架31、两根立杆32和两根横杆33,底部框架31固定在机架1上,两根立杆32间隔固定在底部框架31上,两根横杆33上下间隔固定在两根立杆32之间,分离料仓34的个数为两个,每个分离料仓34包括第一托板35和第二托板36,第一托板35和第二托板36之间形成有用于叠放第一吸塑托盘a的叠放空间37,第一托板35的侧壁上连接有上下分布的两根第一连接杆38,第一连接杆38分别固定在对应横杆33上,第二托板36的侧壁上连接有上下分布的两根第二连接杆39,第二连接杆39分别固定在对应横杆33上。该结构中,分离支架3采用轻量化设计,分离支架3包括底部框架31、两根立杆32和两根横杆33,底部框架31、两根立杆32和两根横杆33分别采用铝型材或者碳钢喷漆,从而保证结构的稳定性;分离料仓34的个数为两个,从而可以一次性容纳多个第一吸塑托盘a,每个叠放空间37内一般可叠加8-10层的第一吸塑托盘a,通过人工定时补料,以保证系统的正常运行,分离料仓34包括相对设置的第一托板35和第二托板36,第一托板35的两侧弯折设置有第一翼板,第二托板36的两侧弯折设置有第二翼板,这样使得叠放空间37具有缝隙,在起到容纳第一吸塑托盘a的同时,也能够直观观察叠放空间37的情况,同时出现卡料情况时,人工也能够快速进行干预;第一托板35通过第一连接杆38与横杆33相固定,第一连接杆38的一端勾在横杆33上,并且采用螺栓固定的方式与横杆33相连接,同样,第二托板36通过第二连接杆39与横杆33相固定,第二连接杆39的一端勾在横杆33上,并且采用螺栓固定的方式与横杆33相连接,这样能够调节第一托板35与第二托板36之间的距离,形成间距可调的叠放空间37,以此适配不同规格的第一吸塑托盘a。
22.本实施例中,拆垛装置4包括第一升降板41、第一升降气缸42和第一夹紧机构43,第一升降气缸42固定在底部框架31上,第一升降气缸42的活塞杆固定在第一升降板41的底部,第一升降板41和底部框架31之间还设有两根第一导向轴,两根第一导向轴位于第一升降气缸42的两侧,第一夹紧机构43包括第一夹紧气缸44和第二夹紧气缸45,第一夹紧气缸44水平固定在第一升降板41的一侧,第一夹紧气缸44的活塞杆上固定有第一移动板46,第一移动板46上固定有两个间隔分布的第一夹板47,第二夹紧气缸45水平固定在第一升降板41的另一侧,第二夹紧气缸45的活塞杆上固定有第二移动板48,第二移动板48上固定有两个间隔分布的第二夹板49,其中位于左侧的第二夹板49处于两块第一夹板47之间,使得左侧的第一夹板47与左侧的第二夹板49形成一用于夹紧左侧分离料仓34内的第一吸塑托盘a的第一夹紧空间,右侧的第一夹板47与右侧的第二夹板49形成一用于夹紧右侧分离料仓34内的第一吸塑托盘a的第二夹紧空间。该结构中,第一升降气缸42用于带动第一夹紧机构43
向上移动,运动过程较为平稳,且易于控制,两根第一导向轴的设置则对第一升降板41的移动起到导向作用;第一夹紧气缸44和第二夹紧气缸45相对设置,且同步进行运动,第一夹紧气缸44上固定有第一移动板46,位于第一移动板46上的两个第一夹板47能随第一夹紧气缸44的活塞杆同步运动,两个第一夹板47分别位于左侧分离料仓34的左右两侧,而第二夹紧气缸45上固定有第二移动板48,位于第二移动板48上的两个第二夹板49能随第二夹紧气缸45的活塞杆同步运动,两个第二夹板49分别位于右侧分离料仓34的左右两侧,当需要夹紧二层之上的全部第一吸塑托盘a时,第一夹紧气缸44的活塞杆向右伸出,使得两块第一夹板47向右运动,而第二夹紧气缸45的活塞杆向左伸出,使得两块第二夹板49向左运动,这样相对的第一夹板47和第二夹板49相互靠近,起到夹紧第一吸塑托盘a的作用,随后在升降气缸的带动下,带动二层之上的第一吸塑托盘a向上移动,实现与底部第一吸塑托盘a分离的目的,而当第一夹紧气缸44和第二夹紧气缸45缩回时,相对的第一夹板47和第二夹板49相互远离,起到松开第一吸塑托盘a的作用,之后该第一吸塑托盘a随转盘2的转动移动至下一个工位。
23.实施例三:如图所示,与实施例二不同的是,位于下方的横杆33上设置有两个用于下压底层第一吸塑托盘a的压边机构5,每个压边机构5包括压边气缸51、连接板52和压板53,压边气缸51通过一加固板水平固定在位于下方的横杆33上,连接板52固定在压边气缸51的活塞上,压板53水平连接在连接板52上,且用于与最底下的吸塑托盘的两侧相接触。该结构中,压边机构5的设置是为了能够在底层第一吸塑托盘a与其接邻的第一吸塑托盘a分离时,更容易进行分离,其包括压边气缸51、连接板52和压板53,在顶升气缸工作同时,压边气缸51也同步工作,其驱动连接板52以及压板53靠近吸塑托盘,压板53具有一与第一吸塑托盘a相适配的避让空间,当其靠近第一吸塑托盘a时,避开第一吸塑托盘a的主体,压住第一吸塑托盘a的边角,从而避免随其它第一吸塑托盘a一起移动的目的。
24.本实施例中,拆垛区域61与放料区域62之间设置有第一限制机构64,第一限制机构64用于阻碍底层的第二吸塑托盘b向放料区域62移动,放料区域62与码垛区域63之间设置有第二限制机构65,第二限制机构65用于阻碍第二吸塑托盘b向放料区域62移动,码垛区域63的出口设置有第三限制机构66,第三限制机构66用于阻碍第二吸塑托盘b向码垛区域63的出口移动。该结构中,拆垛区域61内叠放有空的第二吸塑托盘b,第一限制机构64用于阻碍底层的第二吸塑托盘b向放料区域62移动,以将第二吸塑托盘b截留在拆垛区域61内,当第一限制机构64解除限制,底层的第二吸塑托盘b能够随滚筒输送线60传输至放料区域62内,并被第二限制机构65所截留,以方便机械手机构8进行放料,待放完料后,第二限制机构65解除限制,放满料的第二吸塑托盘b随滚筒输送线60传输至码垛区域63内,并被第三限制机构66限制在码垛区域63内,以便进行叠料,待堆积到一定程度后,人工取下多层第二吸塑托盘b,大大提高了作业效率,整个过程自动化程度较高,无需人工时刻看管。
25.本实施例中,第一限制机构64包括第一限制气缸641,第一限制气缸641通过第一安装座642固定在基座6上,且位于滚筒输送线60的下方,第一限制气缸641的活塞杆上固定有第一挡料板643,当第一限制气缸641驱动第一挡料板643伸出滚筒输送线60上时,第一挡料板643与吸塑托盘接触;该结构中,第一限制气缸641固定在基座6上,正常情况下,第一限制气缸641与第一挡料板643位于滚筒输送线60的下方,这样不影响滚筒输送线60的正常运行,当需要进行挡料时,第一限制气缸641驱动第一挡料板643向上运动,使第一挡料板643
伸出滚筒输送线60,这样第二吸塑托盘b接触到第一挡料板643后无法继续向右移动,实现挡料的目的;第二限制机构65包括第二限制气缸651,第二限制气缸651通过第二安装座652固定在基座6上,且位于滚筒输送线60的下方,第二限制气缸651的活塞杆上固定有第二挡料板653,当第二限制气缸651驱动第二挡料板653伸出滚筒输送线60上时,第二挡料板653与吸塑托盘接触;该结构中,第二限制气缸651固定在基座6上,正常情况下,第二限制气缸651与第二挡料板653位于滚筒输送线60的下方,这样不影响滚筒输送线60的正常运行,当需要进行挡料时,第二限制气缸651驱动第二挡料板653向上运动,使第二挡料板653伸出滚筒输送线60,这样第二吸塑托盘b接触到第二挡料板653后无法继续向右移动,被截留在放料区域62内,实现挡料的目的;第三限制机构66包括第三限制气缸661,第三限制气缸661通过第三安装座662固定在基座6上,且位于滚筒输送线60的下方,第三限制气缸661的活塞杆上固定有第三挡料板663,当第三限制气缸661驱动第三挡料板663伸出滚筒输送线60上时,第三挡料板663与吸塑托盘接触。该结构中,第三限制气缸661固定在基座6上,正常情况下,第三限制气缸661与第三挡料板663位于滚筒输送线60的下方,这样不影响滚筒输送线60的正常运行,当需要进行挡料时,第三限制气缸661驱动第三挡料板663向上运动,使第三挡料板663伸出滚筒输送线60,这样第二吸塑托盘b接触到第三挡料板663后无法继续向右移动,被截留在码垛区域63内,实现挡料的目的。
26.实施例四:如图所示,与实施例三不同的是,第一夹持顶升机构71包括两个第一顶升气缸711和两个第一夹持气缸712,两个第一顶升气缸711分别竖直设置在拆垛区域61的前后两侧,每个第一顶升气缸711的活塞杆上固定有第一顶升板713,第一顶升板713与基座6之间设置有第一导向单元714,第一夹持气缸712水平固定在对应第一顶升板713上,每个第一夹持气缸712的活塞杆上固定有第一夹持板715,两块第一夹持板715之间形成第一夹持空间;该结构中,第一夹持顶升机构71包括两个第一顶升气缸711和两个第一夹持气缸712,第一顶升气缸711采用三位气缸结构,当第一顶升气缸711带动对应第一夹持气缸712向上运动至预设位置后,第一夹持气缸712驱动第一夹持板715运动,使两块第一夹持板715相互靠近,从而夹紧位于二层的第二吸塑托盘b,之后,第一顶升气缸711继续运动,带动二层以上的第二吸塑托盘b与底层的第二吸塑托盘b分离,第一限制机构64接触限制,使位于底层的吸塑托盘由滚筒输送线60移走,随后第一顶升气缸711带动整垛第二吸塑托盘b落下,二层的第二吸塑托盘b变为底层第二吸塑托盘b,等待下一次拆盘分离;第二夹持顶升机构72包括两个第二顶升气缸721和两个第二夹持气缸722,两个第二顶升气缸721分别竖直设置在码垛区域63的前后两侧,每个第二顶升气缸721的活塞杆上固定有第二顶升板723,第二顶升板723与基座6之间设置有第二导向单元724,第二夹持气缸722水平固定在对应第二顶升板723上,每个第二夹持气缸722的活塞杆上固定有第二夹持板725,两块第二夹持板725之间形成第二夹持空间。该结构中,第二顶升机构包括两个第二顶升气缸721和两个第二夹持气缸722,第二顶升气缸721采用三位气缸结构,当第二顶升气缸721带动对应第二夹持气缸722向上运动至预设位置后,第二夹持气缸722驱动第二夹持板725运动,使两块第二夹持板725相互靠近,从而夹紧位于底层的第二吸塑托盘b,之后,第二顶升气缸721继续运动,带动整垛第二吸塑托盘b向上移动,这样最底下第二吸塑托盘b
与滚筒输送线60之间留有空隙,以便于下一个第二吸塑托盘b进行叠放。
27.本实施例中,机械手机构8包括机械手支架81、第一直线模组82、第二直线模组83、第三直线模组84和多个气爪单元85,机械手支架81固定在放料区域62的一侧,第一直线模组82固定在机械手支架81上,且用于驱动第二直线模组83左右移动,第二直线模组83的滑块上连接有第三直线模组84,以带动第三直线模组84前后移动,第三直线模组84的滑块上连接有夹爪安装板86,以带动夹爪安装板86上下移动,多个气爪单元85前后间隔设置在夹爪安装板86上。该结构中,第一直线模组82、第二直线模组83、第三直线模组84的设置使得夹爪安装板86具有前后、左右以及上下方向的自由度,较为灵活,而多个气爪单元85前后间隔固定在夹爪安装板86上,由此一次性能够夹取多个玻瓶药品,并且能有序放置到第二吸塑托盘b上。
28.为了在夹取过程中第一吸塑托盘不发生位移,在基座上对应转盘的取料工位上设置有升降限位装置,以在转盘转动过程中,夹紧第一吸塑托盘,方便气爪单元进行抓取。
29.本实施例中,收集支架9上设置有两个收集料仓91,码垛装置92包括包括第二升降板93、第二升降气缸94和第二夹紧机构95,第二升降气缸94固定在收集支架9的底部,第二升降气缸94的活塞杆固定在第二升降板93的底部,第二升降板93和底部框架31之间还设有两根第二导向轴,两根第二导向轴位于第二升降气缸94的两侧,第二夹紧机构95包括第三夹紧气缸951和第四夹紧气缸952,第三夹紧气缸951水平固定在第二升降板93的一侧,第三夹紧气缸951的活塞杆上固定有第三移动板953,第三移动板953上固定有两个间隔分布的第三夹板954,第四夹紧气缸952水平固定在第二升降板93的另一侧,第四夹紧气缸952的活塞杆上固定有第四移动板955,第四移动板955上固定有两个间隔分布的第四夹板956,其中位于左侧的第四夹板956处于两块第三夹板954之间,使得左侧的第三夹板954与左侧的第四夹板956形成一用于夹紧左侧收集料仓91内的第一吸塑托盘a的第三夹紧空间,右侧的第三夹板954与右侧的第四夹板956形成一用于夹紧右侧收集料仓91内的第一吸塑托盘a的第四夹紧空间。该结构中,第三夹紧气缸951和第四夹紧气缸952相对设置,且同步进行运动,第三夹紧气缸951上固定有第三移动板953,位于第三移动板953上的两个第三夹板954能随第三夹紧气缸951的活塞杆同步运动,两个第三夹板954分别位于左侧收集料仓91的左右两侧,而第四夹紧气缸952上固定有第四移动板955,位于第四移动板955上的两个第四夹板956能随第四夹紧气缸952的活塞杆同步运动,两个第四夹板956分别位于右侧收集料仓91的左右两侧,当需要进行码垛时,第三夹紧气缸951的活塞杆向右伸出,使得两块第三夹板954向右运动,而第四夹紧气缸952的活塞杆向左伸出,使得两块第四夹板956向左运动,这样相对的第三夹板954和第四夹板956相互靠近,起到夹紧第二吸塑托盘b的作用,随后在第二升降气缸94的带动下,带动第二吸塑托盘b向收集料仓91内移动,实现与转盘2分离的目的,而当下一个第二吸塑托盘b被移送至收集料仓91下时,具体而言是移动到底层的第二吸塑托盘b的下方,这样第三夹紧气缸951和第四夹紧气缸952缩回时,底层第二吸塑托盘b落到刚移送的第二吸塑托盘b上,实现叠料的目的,接着第二升降气缸94缩回,带动第二升降板93下移,使第三夹紧气缸951和第四夹紧气缸952对准目前位于底层的第二吸塑托盘b,重复上述动作,实现夹紧向上移送的目的。
30.本实施例中,转盘2通过凸轮分割器21设置在机架1上,转盘2上周向设置有三块定位板22,每块定位板22上设置有两个与第一吸塑托盘a形状相适配的定位槽23。该结构中,
凸轮分割器21为现有技术,其带动转盘2间歇转动,三块定位板22分别对应不同的工位,每块定位板22上设置的定位槽23与第一吸塑托盘a相适配,从而在转动过程中,第一吸塑托盘a与转盘2不易分离。
31.值得注意的是,以上所述仅为本发明的较佳实施例,并非因此限定本发明的专利保护范围,本发明还可以对上述各种零部件的构造进行材料和结构的改进,或者是采用技术等同物进行替换。故凡运用本发明的说明书及图示内容所作的等效结构变化,或直接或间接运用于其他相关技术领域均同理皆包含于本发明所涵盖的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
