1.本发明是关于抛光技术领域,特别是关于一种气囊抛光振动抑制方法及气囊抛光设备。
背景技术:
2.气囊抛光过程中弹性气囊与待加工工件表面存在物理接触,气囊气压、气囊、工件材料力学性能、接触力大小等工艺参数都会影响抛光工具与待抛光工件间接触的动态响应比如抛光振动、弹性回复等。而二者的动态响应会对接触区域内的磨料运动状态产生直接影响,进而对工件抛光过程的材料去除效率与表面抛光质量产生影响。加工振动对抛光设备性能和抛光效果影响重大,成为限制气囊抛光质量提升的一个关键挑战。
3.在现有的气囊抛光方式中,气囊工具和待抛光工件间的共振难于控制,振动的发生导致接触区域压强和磨粒运动状态发生不可控的改变,进而恶化抛光表面,难以满足复杂超精密制造加工质量的需求。
4.因此,针对上述技术问题,有必要提供一种新的气囊抛光振动抑制方法。
技术实现要素:
5.本发明的目的在于提供一种气囊抛光振动抑制方法及气囊抛光设备,其能够在抛光过程中,有效抑制气囊工具和待抛光工件间的共振,使抛光过程更加平稳可控,并提高抛光质量。
6.为实现上述目的,本发明提供的技术方案如下:
7.第一方面,本发明提供了一种气囊抛光振动抑制方法,其包括:气囊工具与待抛光工件抵接,驱动所述气囊工具对待抛光工件进行抛光;在抛光过程中,控制所述气囊工具的转速随时间呈周期性变化,以使所述气囊工具的振动频率,能够远离所述气囊工具和所述抛光工件之间的共振频带。
8.在一个或多个实施方式中,所述气囊工具的转速介于2000~2750rpm之间。
9.在一个或多个实施方式中,所述气囊工具的转速随时间周期性变化的幅值大于50rpm。
10.在一个或多个实施方式中,所述气囊工具的转速随时间周期性变化的幅值为150rpm。
11.在一个或多个实施方式中,所述气囊工具与待抛光工件之间的接触力介于5~15n之间。
12.在一个或多个实施方式中,所述气囊工具与待抛光工件之间的接触力为10n。
13.在一个或多个实施方式中,所述气囊工具的转速的变化周期小于3s。
14.第二方面,本发明提供了一种气囊抛光设备,其包括:气囊工具和控制器。气囊工具用于抛光待抛光工件;控制器用于在所述气囊工具抛光待抛光工件的过程中,控制所述气囊工具的转速随时间呈周期性变化,以使所述气囊工具的振动频率,远离所述气囊工具
和所述抛光工件之间的共振频带。
15.与现有技术相比,本发明提供的气囊抛光振动抑制方法,通过在抛光过程中,主动控制气囊工具的转速随时间呈周期性变化,使气囊工具的振动频率,能够远离其与待抛光工件间的共振频带,可有效抑制抛光过程气囊工具和待抛光工件间的共振,大幅降低抛光过程中的振动幅值,进而提高抛光过程的稳定性,实现抛光质量提升,使抛光过程更加平稳可控。
附图说明
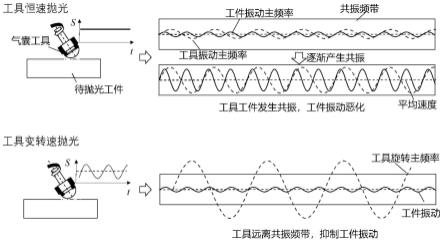
16.图1是恒速抛光方式和变转速抛光方式的振动产生与抑制原理示意图;
17.图2是本发明部分实施例和对比例中接触力和振动量化指标的关系图;
18.图3是本发明部分实施例和对比例中转速变化的幅值和振动量化指标的关系图;
19.图4是本发明部分实施例和对比例中转速变化周期和振动量化指标的关系图;
20.图5是本发明实施例3中的待抛光工件抛光前的表面形貌图;
21.图6是本发明实施例3中的待抛光工件抛光后的表面形貌图。
具体实施方式
22.下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
23.除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
24.本发明一实施方式中的气囊抛光振动抑制方法,包括:气囊工具与待抛光工件抵接,驱动气囊工具对待抛光工件进行抛光;在抛光过程中,控制气囊工具的转速随时间呈周期性变化,以使所述气囊工具的振动频率,能够远离所述气囊工具和所述抛光工件之间的共振频带。
25.所谓共振,是指一个物理系统在特定频率下,比在其他频率能够以更大的振幅做振动的情形。该特定频率即为共振频率。一般来说一个物理系统有多个共振频率,在这些频率上振动比较容易,而在其它频率上振动比较困难。因此,一个物理系统要抑制共振,就要避免系统内的对象,在接近这些共振频率的范围内进行振动。
26.在气囊工具抛光待抛光工件的过程中,由于气囊工具和待抛光工件的相互接触、挤压、摩擦等相互作用,使得气囊工具和待抛光工件组成的系统在一定振动频率范围内,二者会逐渐产生共振,这个频率范围构成了气囊工具和抛光工件之间的共振频带。
27.气囊工具进行抛光作业时,气囊工具的旋转频率是影响气囊工具振动频率的主要因素。其中,气囊的旋转频率由气囊工具的转速决定,例如,气囊的转速为50转/s时,气囊的旋转频率即为50hz。
28.请参照图1中恒速抛光部分所示,气囊工具恒速抛光过程中,气囊工具的振动频率主要受旋转频率影响,其对气囊工具振动频率的影响相对稳定。当待抛光工件的振动频率和气囊工具的振动频率均处于共振频带内时,随着抛光时间的推移,两者逐渐产生共振,导致待抛光工件振动恶化,影响抛光稳定性和抛光质量。
29.请参照图1中变转速抛光部分所示,本实施方式中提供的气囊抛光振动抑制方法,通过在抛光过程中,控制气囊工具的转速随时间呈周期性变化,不断地改变气囊工具的旋转频率,而气囊工具旋转频率的改变,会引起气囊工具振动频率的改变,以使气囊工具的振动频率,在抛光过程中的某些时刻,能够远离气囊工具和抛光工件之间的共振频带,从而可有效抑制气囊工具和待抛光工件间的共振产生,进而提高抛光过程的稳定性,实现抛光质量提升,使抛光过程更加平稳可控。
30.具体地,在抛光过程中,气囊工具被设置成沿单方向旋转,例如,可沿顺时针方向旋转,也可沿逆时针方向旋转,只要在整个抛光过程中保持旋转方向一致即可。
31.具体地,对气囊工具的转速随时间呈周期性变化的方式并无特别限定,例如,气囊工具的转速随时间呈周期性变化的变化曲线,可以是单个正弦或单个余弦函数曲线,也可以是多个正弦和/或多个余弦函数叠加的复合曲线。当然,还可以是其他周期性变化的曲线,只要能够使得气囊工具的振动频率,远离所述气囊工具和所述抛光工件之间的共振频带即可。
32.一示例性的实施例中,气囊工具的转速介于2000~2750rpm之间。即在抛光过程中,气囊工具的转速在2000~2750rpm之间变化,气囊工具的最小转速为2000rpm,最大转速为2750rpm。在本实施例中,对于气囊工具的转速的限定,主要考虑到振动抑制效果,当气囊工具的转速小于2000rpm或大于2750rpm时,振动抑制效果较差。
33.在其他实施例中,可根据气囊抛光设备性能、待抛光工件的材料、结构等抛光条件的不同,将气囊工具的转速设定为其他范围,在此不对气囊工具的转速作特别限定。例如,可将气囊工具的转速设定在3000~5000rpm之间,也可以设定在1000~1500rpm之间,具体的转速范围可根据实际需要进行设定。
34.一示例性的实施例中,气囊工具的转速随时间周期性变化的幅值大于50rpm。即气囊工具的转速随时间周期性变化过程中,气囊工具的最低转速和最高转速之间的差值大于50rpm。转速变化幅值过小,会导致转速变化不明显,可能导致振动抑制效果不佳。优选地,气囊工具的转速随时间周期性变化的幅值为150rpm,当转速变化幅值为150rpm时,能够起到较佳的振动抑制效果。
35.在其他实施例中,根据气囊抛光设备性能、待抛光工件的材料、结构等抛光条件的不同,气囊工具的转速变化幅值也可以设定为其他数值,在此不作特别限定。例如,气囊工具的转速变化幅值可以设定为6rpm、10rpm、13rpm、36rpm、100rpm、500rpm等,具体可根据实际需要进行设定。
36.一示例性的实施例中,气囊工具与待抛光工件之间的接触力为5~15n,当接触力小于5n或大于15n时,振动抑制效果较差。而且接触力过大时,气囊工具受到的挤压较大,气囊下压量增大,可能导致气囊工具无法柔顺顺利进行抛光。优选地,气囊工具与待抛光工件之间的接触力为恒定的,气囊工具与待抛光工件之间的接触力可以为10n,当接触力为10n时,能够起到较佳的振动抑制效果。
37.在其他实施例中,可根据气囊抛光设备性能、待抛光工件的材料、结构等抛光条件的不同,气囊工具与待抛光工件之间的接触力也可以设定为其他数值,在此不作特别限定。例如,气囊工具的接触力可以设定为2n、8n、21n、30n等,具体可根据实际需要进行设定。
38.一示例性的实施例中,气囊工具的转速的变化周期小于3s。气囊工具的转速的变
化周期指的是,气囊工具的转速完成一次周期性变化所需的时间。气囊工具的转速的变化周期过大,会导致单位时间内转速变化不明显,可能导致振动抑制效果不佳。
39.在其他实施例中,根据气囊抛光设备性能、待抛光工件的材料、结构等抛光条件的不同,气囊工具的转速的变化周期也可以设定为其他数值,在此不作特别限定。例如,气囊工具的转速变化周期可以设定为4s、6s、7.2s、10s等,具体可根据实际需要进行设定。
40.本发明一实施方式中,还提供了一种可用于实现前述气囊抛光振动抑制方法的气囊抛光设备,该气囊抛光设备包括气囊工具和控制器。
41.其中,气囊工具用于抛光待抛光工件。控制器用于在所述气囊工具抛光待抛光工件的过程中,控制所述气囊工具的转速随时间呈周期性变化,以使所述气囊工具的振动频率,远离所述气囊工具和所述抛光工件之间的共振频带。
42.具体地,控制器可以是包括微控制器(micro controller unit,mcu)的集成电路。本领域技术人员所熟知的是,微控制器可以包括中央处理单元(central processing unit,cpu)、只读存储模块(read-only memory,rom)、随机存储模块(random access memory,ram)、定时模块、数字模拟转换模块(a/d converter)、以及若干输入/输出端口。当然,控制器也可以采用其它形式的集成电路,如特定用途集成电路(application specific integrated circuits,asic)或现场可编程门阵列(field-programmable gate array,fpga)等。
43.实施例1
44.在气囊工具的最低转速为2600rpm,转速变化的幅值为150rpm,转速随时间变化的曲线符合正弦函数,转速的变化周期为2s,气囊内部气压设定为0.3mpa,加工倾斜角度为15
°
,路径间距为0.5mm,气囊工具步进移速为0.3mm/s的条件下。
45.气囊工具与待抛光工件之间的接触力分别设定为5n、7.5n、10n、12.5n、15n,对待抛光工件进行抛光。
46.实施例2
47.在气囊工具的最低转速为2000rpm,转速随时间变化的曲线符合正弦函数,转速的变化周期为2s,气囊工具与待抛光工件之间的接触力为10n,气囊内部气压设定为0.3mpa,加工倾斜角度为15
°
,路径间距为0.5mm,气囊工具步进移速为0.3mm/s的条件下。
48.气囊工具的转速变化的幅值分别设定为50rpm、100rpm、150rpm、200rpm、250rpm、300rpm,对待抛光工件进行抛光。
49.实施例3
50.在气囊工具的最低转速为2300rpm,转速变化的幅值为150rpm,转速随时间变化的曲线符合正弦函数,气囊工具的转速的变化周期设定为1s,气囊工具与待抛光工件之间的接触力为10n,气囊内部气压设定为0.3mpa,加工倾斜角度为15
°
,路径间距为0.5mm,气囊工具步进移速为0.3mm/s的条件下,对待抛光工件进行抛光。
51.实施例4
52.在气囊工具的最低转速为2300rpm,转速变化的幅值为150rpm,转速随时间变化的曲线符合正弦函数,气囊工具的转速的变化周期设定为2s,气囊工具与待抛光工件之间的接触力为10n,气囊内部气压设定为0.3mpa,加工倾斜角度为15
°
,路径间距为0.5mm,气囊工具步进移速为0.3mm/s的条件下,对待抛光工件进行抛光。
53.对比例1
54.在气囊工具的最低转速为2600rpm,转速变化的幅值为150rpm,转速随时间变化的曲线符合正弦函数,转速的变化周期为2s,气囊工具与待抛光工件之间的接触力为2.5n的条件下,对待抛光工件进行抛光。
55.对比例2
56.在气囊工具的转速(恒定转速)为2600rpm的条件下,气囊工具与待抛光工件之间的接触力分别设定为2.5n、5n、7.5n、10n、12.5n、15n,对待抛光工件进行抛光。
57.对比例3
58.在气囊工具的转速(恒定转速)为2000rpm,气囊工具与待抛光工件之间的接触力为10n的条件下,对待抛光工件进行抛光。
59.对比例4
60.在气囊工具的最低转速为2300rpm,转速变化的幅值为150rpm,转速随时间变化的曲线符合正弦函数,气囊工具与待抛光工件之间的接触力为10n,气囊内部气压设定为0.3mpa,加工倾斜角度为15
°
,路径间距为0.5mm,气囊工具步进移速为0.3mm/s的条件下。
61.气囊工具的转速变化周期分别设定为3s、4s,对待抛光工件进行抛光。
62.请参照图2所示,为本发明实施例1、对比例1和2抛光过程中,对应振动值的测试结果图。由图2可知,在变速模式下,气囊工具与待抛光工件之间的接触力处于5~15n区间内时,振动值要小于恒速模式;且接触力为10n时,在变速模式下的振动值要明显小于恒速模式。
63.请参照图3所示,为本发明实施例2和对比例3抛光过程中,对应振动值的测试结果图。由图3可知,在变速模式下的振动值要明显小于恒速模式,且振动值整体上随着转速变化的幅值的增大而减小,转速变化的幅值为150rpm时振动值最小。
64.请参照图4所示,为本发明实施例3、实施例4和对比例4抛光过程中,对应振动值的测试结果图。由图4可知,在变速模式下,振动值整体上随着转速变化周期的增大而增大,转速变化周期为3s时,振动值基本达到最大值。
65.请参照图5和图6所示,为本发明实施例3中的待抛光工件抛光前后的表面形貌图。由图5和图6可知,采用本发明提供的气囊抛光振动抑制方法进行抛光,能够获得优异的抛光效果。
66.前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。