1.本发明属于潜水设备领域,特别涉及该领域中的一种用于潜水器的油液压直驱浮力及重心调控系统和方法,也可以用于浮标、水下机器人、滑翔机等水下设备。
背景技术:
2.现代海洋环境监测及资源开发离不开各种高性能的水下探测设备及作业工具,在各种水下设备中,浮力调节系统和重心调节系统作为其重要的组成部分,在设备航行及作业过程中发挥着关键作用。对于作业型水下设备而言,工作时不仅需要实时调节下潜深度,而且在运动过程中需要调节自身俯仰角,这些可以通过混合浮力系统来调节重量及体积、重心位置来实现。
3.目前对于潜水器的浮力调节主要有重量调控型,体积调控型及重量—体积混合调控型三类,现有较为成熟的重心—浮心调节主要有移动重块和调拨液体两种方式,重心调节本质上即是通过改变潜水器内部质量分布,达到调节重心位置的目的。现有潜水器的浮力调节与重心—浮心调节为单独模块布置,各个系统结构分离,功能独立实现,组成元件复杂,占用体积大,且存在控制精度不高,监测不准等诸多缺陷。
4.在中国专利“一种用于潜水器的浮心—重心调节及浮力调节装置(公开号cn107891957a)”中,提到了一种用于潜水器的浮心—重心调节及浮力调节装置,其特点是采用油液压驱动,利用两个及以上的油囊通过控制各自体积变化实现潜水器的浮心—重心调节及浮力调节。此专利所公开的设计复杂程度高,占用体积大,浮力调节范围有限,且存在油液压泵工作压力高(≥水深压力),水深压力能未利用等问题。基于现有技术,并不能很好的满足潜水器在浮心—重心及浮力综合调节等方面的需要。
技术实现要素:
5.本发明所要解决的技术问题就是提供一种用于潜水器的油液压直驱浮力及重心调控系统和方法。
6.本发明采用如下技术方案:
7.一种用于潜水器的油液压直驱浮力及重心调控系统,其改进之处在于:包括外壳,在外壳内预充一定压力的惰性气体,还在外壳内设置双向旋转电机、双向液压泵和两个以上的内油囊,上述的双向液压泵由双向旋转电机驱动工作,双向液压泵的两端分别通过油路及一个二位二通电磁开关阀与外壳外的外油囊相连通,在外油囊内充有液压油,每个内油囊均对应的配有两个二位二通电磁开关阀,各内油囊均通过油路与其对应的两个二位二通电磁开关阀并联连通,而这两个二位二通电磁开关阀则分别通过油路连通至双向液压泵的两端,上述双向旋转电机的运行和各二位二通电磁开关阀的开关由外壳内的控制系统控制,外壳内的电源为系统内的各部件供电。
8.进一步的,在外壳的外表面上安装压力传感器,该压力传感器与外壳内的控制系统电连接。
9.进一步的,双向液压泵的两端分别通过油路及一个二位二通电磁开关阀与外壳外的执行单元相连通。
10.进一步的,在外壳上开设一个以上的通孔,每个通孔均由一个弹性气囊密封,在各弹性气囊内均充有压力不同的惰性气体,且各弹性气囊内的气压均高于外壳内的气压,弹性气囊通过包覆在其外的多孔壳与外壳内外相接触。
11.进一步的,所述的内油囊有两个,在外壳内分别位于双向液压泵的两端。
12.一种用于潜水器的油液压直驱浮力及重心调控方法,适用于上述的系统,其改进之处在于:
13.在需要下潜时:如各弹性气囊内的气体压力均大于等于外部水环境压力,则控制系统控制二位二通电磁开关阀(3)、(6)、(7)打开,二位二通电磁开关阀(4)、(5)、(8)关闭,双向旋转电机顺时针旋转使双向液压泵将液压油从外油囊吸入内油囊(11a)和(11b);或者控制系统控制二位二通电磁开关阀(4)、(5)、(8)打开,二位二通电磁开关阀(3)、(6)、(7)关闭,双向旋转电机逆时针旋转使双向液压泵将液压油从外油囊吸入内油囊(11a)和(11b),外油囊体积减小,系统重力不变浮力减小实现下潜;
14.在有弹性气囊内的气体压力开始小于外部水环境压力时,控制系统控制二位二通电磁开关阀(3)、(4)、(5)、(6)、(7)、(8)关闭,双向旋转电机停转,外部水环境压力按照从低压到高压的顺序依次透过多孔壳朝外壳内方向挤压各弹性气囊,使系统体积减小,浮力减小,实现自动下潜;
15.在需要上浮时:如各弹性气囊内的气体压力均小于外部水环境压力,则控制系统控制二位二通电磁开关阀(3)、(6)、(7)关闭,二位二通电磁开关阀(4)、(5)、(8)打开,双向旋转电机逆时针旋转使双向液压泵将液压油从内油囊(11a)和(11b)吸入外油囊;或者控制系统控制二位二通电磁开关阀(4)、(5)、(8)关闭,二位二通电磁开关阀(3)、(6)、(7)打开,双向旋转电机顺时针旋转使双向液压泵将液压油从内油囊(11a)和(11b)吸入外油囊,外油囊体积增大,系统重力不变浮力增大实现上浮;
16.在有弹性气囊内的气体压力开始大于外部水环境压力时,各弹性气囊按照从高压到低压的顺序依次透过多孔壳朝外壳外方向膨胀,使系统体积增大,浮力增大,辅助上浮;
17.在需要左倾下沉时:控制系统控制二位二通电磁开关阀(4)、(5)打开,二位二通电磁开关阀(3)、(6)、(7)、(8)关闭,接通左侧内油囊(11a)与外油囊的单向油路,双向旋转电机旋转使双向液压泵将液压油从外油囊吸入左侧内油囊(11a),左侧内油囊(11a)质量增加,右侧内油囊(11b)质量保持不变,系统整体重心向左倾斜,实现左倾下沉;
18.在需要从左倾下沉恢复至水平姿态时:控制系统控制二位二通电磁开关阀(5)、(6)打开,二位二通电磁开关阀(3)、(4)、(7)、(8)关闭,接通左侧内油囊(11a)与右侧内油囊(11b)之间的油路,双向旋转电机旋转使双向液压泵将液压油从左侧内油囊(11a)吸入右侧内油囊(11b),直至左侧内油囊(11a)与右侧内油囊(11b)质量相等,系统重心右移至外壳内部中心位置,恢复水平稳定姿态;
19.在需要右倾下沉时:控制系统控制二位二通电磁开关阀(3)、(6)打开,二位二通电磁开关阀(4)、(5)、(7)、(8)关闭,接通右侧内油囊(11b)与外油囊的单向油路,双向旋转电机旋转使双向液压泵将液压油从外油囊吸入右侧内油囊(11b),右侧内油囊(11b)质量增加,左侧内油囊(11a)质量保持不变,系统整体重心向右倾斜,实现右倾下沉;
20.在需要从右倾下沉恢复至水平姿态时:控制系统控制二位二通电磁开关阀(5)、(6)打开,二位二通电磁开关阀(3)、(4)、(7)、(8)关闭,接通左侧内油囊(11a)与右侧内油囊(11b)之间的油路,双向旋转电机旋转使双向液压泵将液压油从右侧内油囊(11b)吸入左侧内油囊(11a),直至左侧内油囊(11a)与右侧内油囊(11b)质量相等,系统重心左移至外壳内部中心位置,恢复水平稳定姿态。
21.本发明的有益效果是:
22.本发明所公开的系统,通过外壳内位于双向液压泵两端的两个内油囊及外壳外的外油囊,实现了潜水器重心位置和浮力调节装置及浮力调节装置的一体化设计,简化了系统结构。通过预充惰性气体的弹性气囊,能有效的利用水深压力能,实现系统自动下潜和辅助上浮,达到节能高效的目的。通过在外壳内预充惰性气体,可以降低外壳所承受的压力,减小外壳重量及体积,还能有效降低双向液压泵的最大工作压力,以便于其在内、外油囊之间传递液压油,并且双向液压泵的工作压力范围是可调的。
23.本发明所公开的方法,可以充分利用水深压力能,提高系统的上浮、下潜效率,还能对系统进行左倾、右倾和水平姿态调整。
附图说明
24.图1是本发明实施例1所公开不带压力补偿系统的原理框图;
25.图2是本发明实施例2所公开带压力补偿系统的原理框图。
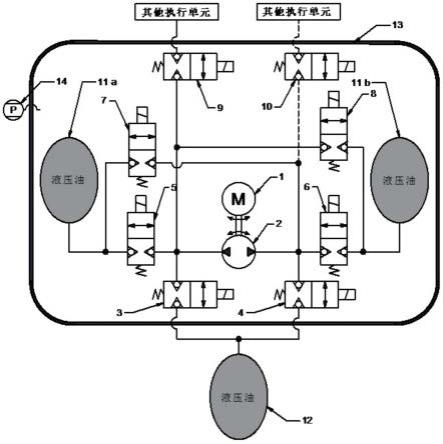
26.附图标记:1—双向旋转电机,2—双向液压泵,3、4、5、6、7、8、9、10—二位二通电磁开关阀,11a,11b—内油囊,12—外油囊,13—外壳,14—压力传感器,a、b、c、d—弹性气囊。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
28.实施例1,如图1所示,本实施例公开了一种用于潜水器的油液压直驱浮力及重心调控系统,包括外壳13,在外壳内预充一定压力的惰性气体,还在外壳内设置双向旋转电机1、双向液压泵2和两个以上的内油囊,上述的双向液压泵由双向旋转电机驱动工作,双向液压泵的两端分别通过油路及一个二位二通电磁开关阀3、4与外壳外的外油囊12相连通,在外油囊内充有液压油,各内油囊在外壳内合理分配布置,每个内油囊均对应的配有两个二位二通电磁开关阀,各内油囊均通过油路与其对应的两个二位二通电磁开关阀并联连通,而这两个二位二通电磁开关阀则分别通过油路连通至双向液压泵的两端。
29.在本实施例中有两个内油囊11a和11b,在外壳内分别位于双向液压泵的两端。内油囊11a与二位二通电磁开关阀5,7对应,内油囊11b与二位二通电磁开关阀6,8对应。
30.上述双向旋转电机的运行和各二位二通电磁开关阀的开关由外壳内的控制系统控制,外壳内的电源为系统内的各部件供电。
31.在外壳的外表面上安装用于测量外部水环境压力的压力传感器14,该压力传感器与外壳内的控制系统电连接,并将测得的外部水环境压力值发送给外壳内的控制系统。
32.双向液压泵的两端分别通过油路及一个二位二通电磁开关阀9、10与外壳外的执
行单元相连通。
33.实施例2,如图2所示,本实施例与实施例1的区别在于:在外壳上开设一个以上的通孔,每个通孔均由一个弹性气囊密封,在各弹性气囊内均充有压力不同的惰性气体,且各弹性气囊内的气压均高于外壳内的气压,弹性气囊通过包覆在其外的多孔壳与外壳内外相接触。
34.在本实施例中有四个弹性气囊a、b、c和d。
35.本实施例还公开了一种用于潜水器的油液压直驱浮力及重心调控方法,适用于本实施例的系统,其原理是由外壳内部的控制系统按照既定逻辑控制不同二位二通电磁开关阀的开闭,通过调节两侧内油囊内的油量,完成系统整体下潜、上浮的浮力调节及俯、仰动作的重心—浮心调节。当需要进行浮力增大(减少)调节时,则同时减小(增大)等量内油囊11a和11b内的液压油;当需要进行重心—浮心调节时,则在增加(减少)内油囊11a内液压油的同时减少(增加)等量内油囊11b内的液压油,从而改变系统的重心,实现俯仰姿态调节;当需要进行定深度保持或定姿态保持时,则将二位二通电磁开关阀3,4断电,关闭内油囊11a和11b与外油囊间的油路,保证内油囊11a和11b的体积不发生变化。具体的说:
36.在需要下潜时:如各弹性气囊内的气体压力均大于等于外部水环境压力,则控制系统控制二位二通电磁开关阀3、6、7打开,二位二通电磁开关阀4、5、8关闭,双向旋转电机顺时针旋转使双向液压泵将液压油从外油囊吸入内油囊11a和11b;或者控制系统控制二位二通电磁开关阀4、5、8打开,二位二通电磁开关阀3、6、7关闭,双向旋转电机逆时针旋转使双向液压泵将液压油从外油囊吸入内油囊11a和11b,外油囊体积减小,系统重力不变浮力减小实现下潜;
37.液压油由外油囊进入内油囊后,内油囊体积增大,而外壳内的气体体积减小,压力升高,在外壳内的气体压力逐渐高于各个弹性气囊内气体压力的过程中,外壳内气体可透过多孔壳朝外壳外方向按照从低压到高压的顺序依次挤压各个弹性气囊,以便降低外壳内气体压力的增长速度,实现压力调节。
38.在有弹性气囊内的气体压力开始小于外部水环境压力时,控制系统控制二位二通电磁开关阀3、4、5、6、7、8关闭,双向旋转电机停转,外部水环境压力按照从低压到高压的顺序依次透过多孔壳朝外壳内方向挤压各弹性气囊,使系统体积减小,浮力减小,实现自动下潜;
39.在需要上浮时:如各弹性气囊内的气体压力均小于外部水环境压力,则控制系统控制二位二通电磁开关阀3、6、7关闭,二位二通电磁开关阀4、5、8打开,双向旋转电机逆时针旋转使双向液压泵将液压油从内油囊11a和11b吸入外油囊;或者控制系统控制二位二通电磁开关阀4、5、8关闭,二位二通电磁开关阀3、6、7打开,双向旋转电机顺时针旋转使双向液压泵将液压油从内油囊11a和11b吸入外油囊,外油囊体积增大,系统重力不变浮力增大实现上浮;
40.液压油由内油囊进入外油囊后,内油囊体积减小,外壳内的气体体积增加、压力降低,各个弹性气囊内的气体压力也在降低,如在此过程外壳内的气体压力高于部分弹性气囊内的气体压力,外壳内气体可透过多孔壳朝外壳外方向按照从低压到高压的顺序依次挤压各个弹性气囊,以便降低外壳内气体压力的降低速度,实现压力调节。
41.在有弹性气囊内的气体压力开始大于外部水环境压力时,各弹性气囊按照从高压
到低压的顺序依次透过多孔壳朝外壳外方向膨胀,使系统体积增大,浮力增大,辅助上浮;
42.在需要横倾姿态调节时:通过调拨两个内油囊内的液压油量从而改变系统内部的质量分布,达到调节其重心位置的目的,实现系统在水下的俯仰角调节。在系统水平初始位置时,内油囊11a与11b内的液压油量相同,此时重心位于系统内部中心位置,系统保持水平稳定姿态。
43.在需要左倾下沉时:控制系统控制二位二通电磁开关阀4、5打开,二位二通电磁开关阀3、6、7、8关闭,接通左侧内油囊11a与外油囊的单向油路,双向旋转电机旋转使双向液压泵将液压油从外油囊吸入左侧内油囊11a,左侧内油囊11a质量增加,右侧内油囊11b质量保持不变,系统整体重心向左倾斜,实现左倾下沉;
44.在需要从左倾下沉恢复至水平姿态时:控制系统控制二位二通电磁开关阀5、6打开,二位二通电磁开关阀3、4、7、8关闭,接通左侧内油囊11a与右侧内油囊11b之间的油路,双向旋转电机反向旋转使双向液压泵将液压油从左侧内油囊11a吸入右侧内油囊11b,直至左侧内油囊11a与右侧内油囊11b质量相等,系统重心右移至外壳内部中心位置,恢复水平稳定姿态;
45.在需要右倾下沉时:控制系统控制二位二通电磁开关阀3、6打开,二位二通电磁开关阀4、5、7、8关闭,接通右侧内油囊11b与外油囊的单向油路,双向旋转电机旋转使双向液压泵将液压油从外油囊吸入右侧内油囊11b,右侧内油囊11b质量增加,左侧内油囊11a质量保持不变,系统整体重心向右倾斜,实现右倾下沉;
46.在需要从右倾下沉恢复至水平姿态时:控制系统控制二位二通电磁开关阀5、6打开,二位二通电磁开关阀3、4、7、8关闭,接通左侧内油囊11a与右侧内油囊11b之间的油路,双向旋转电机反向旋转使双向液压泵将液压油从右侧内油囊11b吸入左侧内油囊11a,直至左侧内油囊11a与右侧内油囊11b质量相等,系统重心左移至外壳内部中心位置,恢复水平稳定姿态。
47.下表是二位二通电磁开关阀3、4、5、6、7、8的开( )关(—)逻辑顺序表:
48.
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。