1.本实用新型涉及水下机器人技术领域,具体为一种水下机器人。
背景技术:
2.水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,而无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。
3.目前,水下机器人在水中进行上浮或下潜时都需要螺旋桨进行控制,而螺旋桨旋转时容易将水中条状形藻类或垃圾搅进螺旋桨内,从而使螺旋桨的的旋转受到影响,使水下机器人的运行出现问题,现发明一种水下机器人,能有效防止藻类被搅进螺旋桨内。
技术实现要素:
4.针对现有技术的不足,本实用新型提供一种水下机器人,具备能有效防止藻类被搅进螺旋桨内等优点,解决了目前,水下机器人在水中进行上浮或下潜时都需要螺旋桨进行控制,而螺旋桨旋转时容易将水中条状形藻类或垃圾搅进螺旋桨内,从而使螺旋桨的的旋转受到影响的问题。
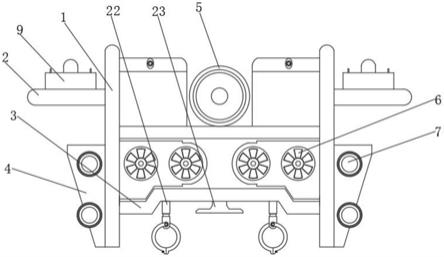
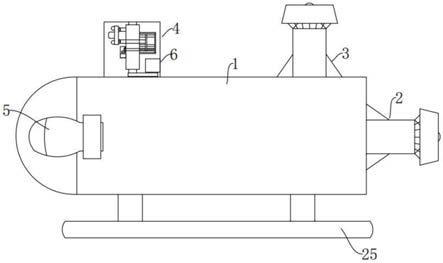
5.本实用新型的一种水下机器人,包括机器人主体、防水监控器和全密封免维护充油推进器,机器人主体顶部的左右两侧均固定连接有连接板,连接板板身正面与背部的中央均开设有圆孔,圆孔内腔的中央固定连接有防护环,防护环内环的顶部固定连接有十字形连接板,十字形连接板板身的中央固定连接有防水电机,防水电机底部的输出轴贯穿于十字形连接板板身的中央且其底部传动连接有螺旋桨,十字形连接板板身的顶部绕圆周等距离开设有扇形开口,扇形开口远离防水电机一侧的顶部绕四分之一圆开设有第一插接圆孔,第一插接圆孔顶部活动连接有扇形连接块,防水监控器位于机器人主体顶部的中央,机器人主体底部的中央固定连接有固定架,全密封免维护充油推进器位于机器人主体中央左右两侧的正面与背部,固定架底部的中央固定连接有外接设备连接板。
6.本实用新型的一种水下机器人,其中机器人主体左右两侧的底部均固定连接有辅助固定板,辅助固定板正面的顶部与底部均固定连接有水下照明灯,该设计有益于方便工作人员对水下的环境进行观测。
7.本实用新型的一种水下机器人,其中防护环环身的底部圆周等距离开设有第二插口圆孔,第二插口圆孔的底部活动插接有环形连接块,环形连接块与扇形连接块的开口内均固定连接有过滤网,该设计有益于使环形连接块与扇形连接块具有防垃圾和水藻的作用。
8.本实用新型的一种水下机器人,其中环形连接块块身内腔过滤网的中央固定连接有固定块,固定块顶部的中央转动连接有转杆,转杆的顶部绕圆周等距离固定连接有转动杆,该设计有益于转动杆可以被转动的螺旋桨带动进行旋转。
9.本实用新型的一种水下机器人,其中扇形开口远离防水电机一侧口身的中央固定连接有小型凸块,扇形连接块块身底部和环形连接块的顶部远离防水电机的一侧分别绕扇形和圆周等距离固定连接有插接柱,该插接柱分别位于第二插口圆孔与第一插接圆孔内,该设计有益于方便工作人员安装和拆卸扇形连接块和环形连接块。
10.本实用新型的一种水下机器人,其中转动杆位于螺旋桨的底部且转动杆的杆身上沿水平横向等距离开设有细小的齿槽,该设计有益于转动杆位转动时能有效的将水藻或垃圾搅住。
11.本实用新型的一种水下机器人,其中外接设备连接板板身的底部沿水平横向与纵向等距离开设有螺纹孔,固定架底部中央的左右两侧均固定连接有外接固定器,该设计有益于方便工作人员将声呐探测器等辅助装置固定在该无人机的底部。
12.外接固定器包括连接柱,连接柱的底部转动连接有旋转柱,旋转柱柱身底部的中央贯通连接有转轴,转轴轴身的正面与背部均固定连接有卡接固定环,卡接固定环环身的底部固定连接有空心块,空心块内腔的中央开设有螺纹连接孔,该螺纹连接孔的内腔螺纹连接有螺纹柱,该设计有益于方便工作人员将机械臂等圆柱形外接设备固定在该无人机上。
13.与现有技术相比,本实用新型的有益效果如下:
14.本实用新型通过十字形连接板上开设的扇形开口以及第一插接圆柱与扇形连接块之间的结构设计,能方便工作人员将带有过滤网的扇形连接块固定在扇形开口的口身上,从而使螺旋桨旋转被防水电机带动旋转时顶部的垃圾和水藻不会进入到防护环内,再通过第二插口圆孔与环形连接块之间的结构设计,能使方便工作人员将带动有过滤网的环形连接块固定在防护环的底部,同时通过固定块与转杆以及十字形连接板之间的结构设计,能使螺旋桨旋转时可以带动十字形连接板一起进行转动,从而使转动的十字形连接板可以将进入到防护环内的水藻和垃圾缠绕住,防止其直接缠绕在螺旋桨上,同时该设计还能方便工作人员进行清理,从而使该水下机器人,达到了能有效防止藻类或垃圾被搅进螺旋桨内。
附图说明
15.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
16.图1为本实用新型正面整体结构示意图;
17.图2为本实用新型俯视面整体结构示意图;
18.图3为本实用新型防护环俯视面整体结构示意图;
19.图4为本实用新型防护环仰视面部分结构示意图;
20.图5为本实用新型防护环仰视面整体结构示意图;
21.图6为本实用新型扇形连接块俯视面结构示意图;
22.图7为本实用新型防护环正面剖视结构示意图;
23.图8为本实用新型外接固定器正面整体结构示意图。
24.图中:1、机器人主体;2、连接板;3、固定架;4、辅助固定板;5、防水监控器;6、全密封免维护充油推进器;7、水下照明灯;8、圆孔;9、防护环;10、防水电机;11、第一插接圆孔;
12、扇形开口;13、十字形连接板;14、螺旋桨;15、第二插口圆孔;16、环形连接块;17、转动杆;18、扇形连接块;19、小型凸块;20、固定块;21、转杆;22、外接固定器;221、连接柱;222、旋转柱;223、转轴;224、卡接固定环;225、空心块;226、螺纹柱;23、外接设备连接板。
具体实施方式
25.以下将以图式揭露本实用新型的多个实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,应了解到,这些实务上的细节不应用以限制本实用新型。也就是说,在本实用新型的部分实施方式中,这些实务上的细节是非必要的。此外,为简化图式起见,一些习知惯用的结构与组件在图式中将以简单的示意的方式绘示之。
26.另外,在本实用新型中如涉及“第一”、“第二”等的描述仅用于描述目的,并非特别指称次序或顺位的意思,亦非用以限定本实用新型,其仅仅是为了区别以相同技术用语描述的组件或操作而已,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
27.请参阅图1
‑
8,本实用新型的一种水下机器人,包括机器人主体1、防水监控器5和全密封免维护充油推进器6,机器人主体1顶部的左右两侧均固定连接有连接板2,连接板2板身正面与背部的中央均开设有圆孔8,圆孔8内腔的中央固定连接有防护环9,防护环9内环的顶部固定连接有十字形连接板13,十字形连接板13板身的中央固定连接有防水电机10,防水电机10底部的输出轴贯穿于十字形连接板13板身的中央且其底部传动连接有螺旋桨14,十字形连接板13板身的顶部绕圆周等距离开设有扇形开口12,扇形开口12远离防水电机10一侧的顶部绕四分之一圆开设有第一插接圆孔11,第一插接圆孔11顶部活动连接有扇形连接块18,防水监控器5位于机器人主体1顶部的中央,机器人主体1底部的中央固定连接有固定架3,全密封免维护充油推进器6位于机器人主体1中央左右两侧的正面与背部,固定架3底部的中央固定连接有外接设备连接板23。
28.机器人主体1左右两侧的底部均固定连接有辅助固定板4,辅助固定板4正面的顶部与底部均固定连接有水下照明灯7,该设计有益于方便工作人员对水下的环境进行观测。
29.防护环9环身的底部圆周等距离开设有第二插口圆孔15,第二插口圆孔15的底部活动插接有环形连接块16,环形连接块16与扇形连接块18的开口内均固定连接有过滤网,该设计有益于使环形连接块16与扇形连接块18具有防垃圾和水藻的作用。
30.环形连接块16块身内腔过滤网的中央固定连接有固定块20,固定块20顶部的中央转动连接有转杆21,转杆21的顶部绕圆周等距离固定连接有转动杆17,该设计有益于转动杆17可以被转动的螺旋桨14带动进行旋转。
31.扇形开口12远离防水电机10一侧口身的中央固定连接有小型凸块19,扇形连接块18块身底部和环形连接块16的顶部远离防水电机10的一侧分别绕扇形和圆周等距离固定连接有插接柱,该插接柱分别位于第二插口圆孔15与第一插接圆孔11内,该设计有益于方便工作人员安装和拆卸扇形连接块18和环形连接块16。
32.转动杆17位于螺旋桨14的底部且转动杆17的杆身上沿水平横向等距离开设有细
小的齿槽,该设计有益于转动杆17位转动时能有效的将水藻或垃圾搅住。
33.外接设备连接板23板身的底部沿水平横向与纵向等距离开设有螺纹孔,固定架3底部中央的左右两侧均固定连接有外接固定器22,该设计有益于方便工作人员将声呐探测器等辅助装置固定在该无人机的底部。
34.外接固定器22包括连接柱221,连接柱221的底部转动连接有旋转柱222,旋转柱222柱身底部的中央贯通连接有转轴223,转轴223轴身的正面与背部均固定连接有卡接固定环224,卡接固定环224环身的底部固定连接有空心块225,空心块225内腔的中央开设有螺纹连接孔,该螺纹连接孔的内腔螺纹连接有螺纹柱226,该设计有益于方便工作人员将机械臂等圆柱形外接设备固定在该无人机上。
35.在使用本实用新型时:当工作人员需要操作该水下机器人在水下进行探测时,可以将方形的声呐探测器与外接设备连接板23通过螺杆固定在一起,而机械臂等圆形设备则可以通过卡接固定环224固定住,再将带有过滤网和插柱的扇形连接块18与扇形开口12上的第一插接圆孔11插接在一起,并将带有插柱和过滤网的环形连接块16与防护环9的底部插接在一起,此时将机器人送入水中,当防水电机10带动螺旋桨14进行下潜时,防护环9的底部会产生吸力而顶部则会产生推力,而这时环形连接块16上的过滤网能挡住大部分的水藻和垃圾,而被螺旋桨14带动一起进行转动的转动杆17会将通过过滤网的水藻和垃圾搅住,从而防止水藻和垃圾被绞入到螺旋桨14内,而上升时十字形连接板13与防水电机10以及扇形连接块18上的过滤网也能防止水藻或垃圾进入到防护环9内,从而能有效的防止螺旋桨14上缠绕上海藻和垃圾。
36.以上所述仅为本实用新型的实施方式而已,并不用于限制本实用新型。对于本领域技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原理的内所作的任何修改、等同替换、改进等,均应包括在本实用新型的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。