1.本发明涉及电机风罩制造设备领域,尤其涉及一种辅助冲制小型电机风罩的自动化装置。
背景技术:
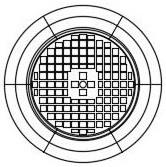
2.在现在电机行业生产中,自动化智能化在各主要工序流程中均有表现,而在辅助配件生产中,一些配件还未实现自动化生产。如小型电机风罩。风罩通风孔常用排布方式有依照分度圆等分辐射的方式排布和纵横均布的方式排布。中大型电机风罩的通风孔的加工一般是通过数控程序控制x、y两轴移动,按照图纸要求改变工件坐标,单孔循环冲制的方式进行生产。小型电机风罩通风孔冲制时,根据通风孔的实际排列方式,分4―6次冲制。以电机风罩通风孔纵横均布方式为例(如图1),其工艺流程为:先在冲床上冲出中心圆孔及依照此孔为圆心的分度圆上的4个等分通风孔(此4孔作为下道工序定向基准),然后转入下道工序;再以中心圆孔定位和分度圆上任意一通风孔定向,完成一次冲制,接下来同样以中心圆孔定位再旋转90
º
,以上工序定向通风孔相邻的通风孔定向,继续冲制;第三次和第四次重复上述动作,旋转定向时需向同一方向旋转,以减少累积误差。
3.现有技术的缺陷是:(1)误差较大 根据现在工艺特点,虽然用向同侧旋转的方法可以减少误差,但由于定位孔和定向孔两位置毗邻,误差会随着通风孔离工件中心越远而被放大。
4.(2)冲制工序较多 五个工序,需要五台冲床 ,生产占用场地大;如果放在同一冲床上冲制,需要模具五套,更换五套模具冲制,则生产周期变长,生产效率低。
5.(3)工作环境差 多台冲床生产时,生产过程中产生的噪音较大;长时间在此环境中,操作工易患职业疾病,而且安全隐患很难杜绝。
6.(4)变换品种不方便 电机风罩规格较多,变换品种时不但要更换模具部分,还要更换配套机械部件,费时费力 。
7.因此,需要改变生产工艺,使多个工序在一台冲床上同时冲制完成,有必要提供一种生产效率高、变换品种方便的自动化装置。
技术实现要素:
8.本发明的目是解决上述技术问题,提供一种辅助冲制小型电机风罩的自动化装置。
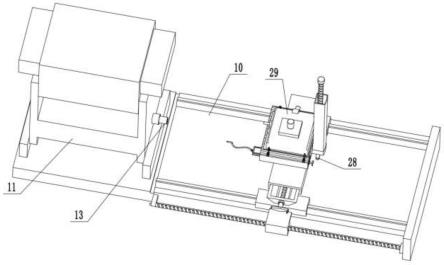
9.为了实现上述技术目的,达到上述的技术要求,本发明所采用的技术方案是:一种辅助冲制小型电机风罩的自动化装置,包括机座部件,其特征在于:所述机座部件上设置有安装板部件,安装板部件上设置有控制箱和xy轴部件,xy轴部件上设置有z轴部件,z轴部件上设置有夹紧部件;所述xy轴部件包括设置在安装板组件前后方向的直线导轨a,两个直线导轨a之间平行设置有丝杆和x轴伺服电机,所述直线导轨a的滑块a上设置有衬块,所述衬块上设置有
模组安装板,所述安装板组件前侧面设置有副撑直线导轨,副撑直线导轨的滑块b上连接有副撑,所述副撑顶面和模组安装板顶面连接有y轴直线运动模组,所述安装板组件后侧面间隔设置有x轴限位光电开关;所述y轴直线运动模组上左右对称设置有z轴部件安装块,所述y轴直线运动模组侧面间隔设置有y轴限位光电开关;所述y轴直线运动模组左右两侧安装板部件上设置有风琴防护罩;所述z轴部件包括固定座、z轴伺服电机、同步带传动机构,所述固定座前侧竖向间隔设置有直线导轨b,滚珠丝杆螺母座固定在直线导轨b的滑块c上,所述滚珠丝杆螺母座前侧面设置有夹紧部件安装座,所述滚珠丝杆螺母座向固定座内延伸,滚珠丝杆螺母设置在滚珠丝杆螺母座孔内,滚珠丝杆竖向设置在固定座内,并设置在滚珠丝杆螺母内,所述固定座一侧面间隔设置有限位接近开关;所述夹紧部件包括平行设置的两个型材,所述型材顶面设置有直线导轨c,型材侧面间隔设置有手臂限位光电开关,所述型材和直线导轨c上设置有若干个夹紧装置,所述夹紧装置包括电机支座、手臂安装座,所述型材底面固定连接有电机支座,所述直线导轨c的滑块d上面固定连接有手臂安装座, 所述电机支座上部垂直面上连接有定制双螺杆步进电机,所述定制双螺杆步进电机一端设置有螺杆a,另一端设置有螺杆b ,所述螺杆a与夹紧手臂a连接,所述螺杆b 与夹紧手臂b连接;所述夹紧手臂a和夹紧手臂b与电机罩壳接触处设置有软衬垫。
10.优选的,所述夹紧手臂a与螺杆a连接处设置有螺母a;所述夹紧手臂b与螺杆b连接处设置有螺母b。
11.优选的,所述定制双螺杆步进电机的螺杆a与螺杆b的螺纹旋向相反。
12.优选的,所述夹紧手臂a与夹紧手臂b结构相同,安装方向相反。
13.优选的,所述夹紧手臂a与夹紧手臂b与电机风罩接触处设置有梯形开口结构或圆弧结构;所述夹紧手臂a与夹紧手臂b两侧面设置有多个长方形凹槽。
14.优选的,所述软衬垫采用材料为:耐油硅胶板。
15.优选的,所述机座部件包括箱体、电控元件安装板、撑脚角座。
16.优选的,所述型材和直线导轨c上设置有若干个夹紧装置,每个夹紧装置间的中心距相等,夹紧装置间的中心距与模具间的中心距相等。
17.优选的,若干个定制双螺杆步进电机同时工作,若干个夹紧手臂a644和夹紧手臂b648同时反向移动至产品型号对应的尺寸。
18.本发明的有益效果:1.结构新颖合理,运动平稳准确,自动化程度高,操作及更换品种十分方便,大幅度提高了生产效率、降低了噪音量。
19.2.定制双螺杆步进电机输出端一端设置有螺杆a,另一端设置有螺杆b,且螺杆a与螺杆b的螺纹旋向相反, 使夹紧手臂a与夹紧手臂b同时开合,且开合速度缓慢无冲击,工件不易产生变形。
20.3.夹紧手臂上设置有耐油硅胶板,与工件之间产生弹性接触,既能防止工件变形又能增加摩擦力,防止工件脱落,还能避免夹紧手臂磨损。
21.4.夹紧手臂两侧面设置有多个长方形凹槽,减轻了重量,且防止形变。
22.5.采用x轴限位光电开关准确灵敏地控制夹紧装置沿x轴方向移动工件,移动距离
为模具的中心距;手臂限位光电开关准确灵敏地控制夹紧手臂a与夹紧手臂b开合尺寸。
23.6.当需要调整夹持力大小时,能通过触摸屏调整夹持力,确保夹紧手臂a与夹紧手臂b夹持的工件既不变形,又不会脱落。
24.7.采用滚珠丝杠、直线导轨、同步带传动,使运动平稳准确。
附图说明
25.图1为电机风罩示意图;图2为本发明立体示意图;图3为本发明主视图示意图;图4为本发明俯视图示意图;图5为本发明中xy轴部件主视图示意图;图6为本发明中xy轴部件俯视图示意图;图7为本发明中xy轴部件左视图示意图;图8为本发明中z轴部件主视图示意图;图9为本发明中z轴部件左视图示意图;图10为本发明中夹紧部件主视图示意图;图11为本发明中夹紧部件俯视图示意图;图12为本发明中夹紧部件左视图示意图;图13为图10中a处放大图;在图中:1.机座部件,2.安装板部件,3.控制箱,4.xy轴部件,41.x轴伺服电机,42.联轴器,43.丝杆前固定座,44.丝杆,45.衬块,46.y轴直线运动模组,47.模组安装板,48.丝杆后固定座,49.直线导轨a,410.x轴限位光电开关,411.信号板,412.副撑直线导轨,413.y轴限位光电开关,414.副撑,415.z轴部件安装块,416.模组安装板,417.风琴防护罩,418.坦克链槽,5.z轴部件,51.固定座,52.z轴伺服电机,53.同步带传动机构,54.滚珠丝杆,55.直线导轨b,57.夹紧部件安装座,58.滚珠丝杆螺母座,59.滚珠丝杆螺母,510.限位接近开关,6.夹紧部件,61.型材,62.直线导轨c,63.手臂限位光电开关,64.夹紧装置,641.手臂安装座,642.定制双螺杆步进电机,6421.螺杆a,6442.螺杆b,643.电机支座,644.夹紧手臂a ,645.软衬垫,646.螺母a,647.夹紧手臂b 。
具体实施方式
26.下面对本发明作进一步说明。
27.参照附图,一种辅助冲制小型电机风罩的自动化装置,包括机座部件1,其特征在于:所述机座部件1上设置有安装板部件2,安装板部件2上设置有控制箱3和xy轴部件4,xy轴部件4上设置有z轴部件5,z轴部件5上设置有夹紧部件6;所述xy轴部件4包括设置在安装板组件2前后方向的直线导轨a49,两个直线导轨a49之间平行设置有丝杆44和x轴伺服电机41,所述直线导轨a49的滑块a上设置有衬块45,所述衬块45上设置有模组安装板416,所述安装板组件2前侧面设置有副撑直线导轨412,副撑直线导轨412的滑块b上连接有副撑414,所述副撑414顶面和模组安装板416顶面连接有y轴直线运动模组46,所述安装板组件2后侧面间隔设置有x轴限位光电开关413;所述y轴直
线运动模组46上左右对称设置有z轴部件安装块415,所述y轴直线运动模组46侧面间隔设置有y轴限位光电开关413;所述y轴直线运动模组46左右两侧安装板部件2上设置有风琴防护罩417;所述z轴部件5包括固定座51、z轴伺服电机52、同步带传动机构53,所述固定座51前侧竖向间隔设置有直线导轨b55,滚珠丝杆螺母座58固定在直线导轨b55的滑块c上,所述滚珠丝杆螺母座58前侧面设置有夹紧部件安装座57,所述滚珠丝杆螺母座58向固定座54内延伸,滚珠丝杆螺母59设置在滚珠丝杆螺母座58孔内,滚珠丝杆54竖向设置在固定座51内,并设置在滚珠丝杆螺母59内,所述固定座51一侧面间隔设置有限位接近开关510;所述夹紧部件6包括平行设置的两个型材61,所述型材61顶面设置有直线导轨c62,型材61侧面间隔设置有手臂限位光电开关63,所述型材61和直线导轨c62上设置有若干个夹紧装置64,所述夹紧装置64包括电机支座643、手臂安装座641,所述型材61底面固定连接有电机支座643,所述直线导轨c62的滑块d上面固定连接有手臂安装座641, 所述电机支座643上部垂直面上连接有定制双螺杆步进电机642,所述定制双螺杆步进电机642一端设置有螺杆a6421,另一端设置有螺杆b6422,所述螺杆a6421与夹紧手臂a644连接,所述螺杆b 6442与夹紧手臂b647连接;所述夹紧手臂a644和夹紧手臂b647与电机罩壳接触处设置有软衬垫645。
28.本优选实施例中,所述夹紧手臂a644与螺杆a6421连接处设置有螺母a646;所述夹紧手臂b647与螺杆b6442连接处设置有螺母b。
29.本优选实施例中,所述定制双螺杆步进电机642的螺杆a6421与螺杆b6442的螺纹旋向相反。
30.本优选实施例中,所述夹紧手臂a644与夹紧手臂b647结构相同,安装方向相反。
31.本优选实施例中,所述夹紧手臂a644与夹紧手臂b647与电机风罩接触处设置有梯形开口结构或圆弧结构;所述夹紧手臂a644与夹紧手臂b647两侧面设置有多个长方形凹槽。
32.本优选实施例中,所述软衬垫645采用材料为:耐油硅胶板。
33.本优选实施例中,所述机座部件1包括箱体、电控元件安装板、撑脚角座。
34.本优选实施例中,所述型材61和直线导轨c62上设置有若干个夹紧装置64,每个夹紧装置64间的中心距相等,夹紧装置64间的中心距与模具间的中心距相等。
35.本优选实施例中,若干个定制双螺杆步进电机同时工作,若干个夹紧手臂a644和夹紧手臂b648同时反向移动至产品型号对应的尺寸。
36.本发明工作背景是冲床一台,把原工艺的五次冲制的方式,改为在一副模架并列三组模具,模具间的中心距相等,五次冲制改成三次冲制的方式。在模架左右两侧分别安装一个准备工位和一个过渡工位,准备工位与模具及模具与过渡工位间的中心距与模具间的中心距相等,并处于同一高度和同一直线上,以配合本发明自动化装置工作。
37.本发明操作过程如下:1.启动冲床,把冲床选择开关旋至单动选项,使冲床滑块处于上止点状态,以便于本发明自动化装置控制冲床。
38.2.打开电源,检查触摸屏上的外部指示信号,确认冲床上止点信号灯处于点亮状态,确认触摸屏对话框中的产品型号(本发明自动化装置内置了多种产品型号的相关参
数)。
39.3.按下操作台上的原点按钮,使x、y、z轴及夹紧装置回至本发明自动化装置原点,即x轴处于左侧,y轴处于后侧,z轴处于下位,夹紧装置处于张开状态。
40.4、完成准备工作后,位于模具左侧的准备工位上的光电传感器感知有来料(指示灯被点亮),三组模具上均无料,且位于模具右侧的过渡工位上的光电传感器也显示无料(指示灯熄灭),则已符合本发明启动条件。
41.5、按下启动按钮,y轴前移至设定距离(此值可通过触摸屏调整)后,四个定制双螺杆步进电机同时工作,夹紧手臂a644和夹紧手臂b648移动至符合本次产品型号的固定尺寸(此值可通过触摸屏调整以改变夹持力),完成夹持动作z轴上行至产品完全脱离下模(此值可通过触摸屏调整)后,x轴向右移动固定距离(此值即两模具间中心距),z轴下行至原点,工件就位,四个定制双螺杆步进电机同时工作,夹紧手臂a644和夹紧手臂b648同时松开回至原位,plc发出信号,冲床滑块运动一周期后,回到上止点待命,冲床工作的同时,y轴回到初始位置,然后x轴也回到左侧初始位置,即本装置回到初始状态,这样就完成了一次工作循环。随着左侧准备工位持续来料,自动化装置和冲床依照上述工作顺序持续工作,如此三个循环后,冲制好的电机风罩就被本发明移至右侧过渡工位,由执行下道工序的机械手取走。接下来冲床和自动化装置每循环工作一次,就会有一成品从模具中移出。
42.当需要调整产品型号时,只需要更换模具部分、准备工位及过渡工位的定位部分,本发明自动化装置内置了多种产品型号的相关参数,在触摸屏对话框中选择相应的产品型号,按下原点按钮,四个定制双螺杆步进电机同时工作,夹紧手臂a644和夹紧手臂b647即移动至符合本次产品型号的固定尺寸,此值还可通过触摸屏调整以改变夹持力。
43.本发明的上述实施例,仅仅是清楚地说明本发明所做的举例,但不用来限制本发明的保护范围,所有等同的技术方案也属于本发明的范畴,本发明的专利保护范围应由各项权利要求限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。