1.本发明涉及风力发电领域,尤其是涉及一种基于无人机实现风场全域自动化巡检的路径规划方法。
背景技术:
2.作为可再生能源的风力发电发展越来越快,装机容量越来越大。随着越来越多风电场的投入使用,对风电设备的运维也提出了更大的挑战。目前大多数风场主要分布在远郊、山区、近海及戈壁等地理和气候环境十分复杂的偏远地带,风机之间的距离相隔也比较远,通达困难。而叶片作为风机捕捉风能转换为电能的关键部件,又常年在高空、全天候条件下工作,雷电、冰雹、雨雪、沙尘、大风等都有可能危害到风机叶片,若不及时对全场风机叶片进行巡检处理修复,会影响风机的寿命及发电效益,甚至演变成严重事故。当前风场内所有风机叶片的巡检主要依赖人工完成,由于检测的精度、速度、安全性以及容易受气候环境和地理环境等方面的限制,检测存在强度大、成本高、危险性高、效率低下和可靠性低等问题。
3.近年来,随着无人机技术的飞速发展以及日益成熟的设备技术,使得基于无人机技术的风电巡检模式有了很大发展,依靠无人机精准的悬停导航技术,再搭载相应的高清摄像头,风电运维的巡检效率得以大大提高。但是大多数风场内包含数十台风机,风机间隔较远,通达困难,目前基于无人机的风电巡检技术研究,大多是针对单台风机,单台风机检测完成后无人机飞回换电并移往下一台目标风机,这种模式一方面没能充分利用无人机电池的续航里程,另一方面也没有将域内所有风机作为一个整体巡检目标考虑,没有充分规划场内所有风机巡检的路径,以便实现寻优目标,提升巡检效率。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于无人机实现风场全域自动化巡检的路径规划方法。
5.本发明的目的可以通过以下技术方案来实现:
6.根据本发明的一个方面,提供了一种基于无人机实现风场全域自动化巡检的路径规划方法,该方法用于无人机对风场进行巡检规划,所述的方法包括对全场风机进行聚类,并对聚类中心间的巡检路径和聚类内风机叶片的所有巡检路径之和进行寻优。
7.作为优选的技术方案,该方法采用了双层路径规划算法,具体包括:
8.第一层路径规划,实现了全场风机聚类分类,并对聚类中心间的巡检路径进行寻优;
9.第二层路径规划,以聚类中心作为无人机起始点和换电点,以无人机从起飞到巡检完该聚类内所有风机叶片的所有路径之和为优化目标,实现了各聚类内的巡检路径寻优。
10.作为优选的技术方案,所述第一层路径规划包括:首先利用k-means聚类算法将所
有风机分为k个聚类,并计算每个聚类的中心ki坐标;然后利用粒子群算法或模拟退火算法对k个聚类中心进行聚类中心间的巡检路径规划,实现k个聚类区域间的巡检路径寻优,以最少的换电点实现风场巡检全覆盖。
11.作为优选的技术方案,所述第一层路径规划具体包括以下步骤:
12.步骤101、获取风场内所有风机的地理坐标、风机塔筒高度、叶片长度物理信息;
13.步骤102、根据所有风机的地理坐标(二维坐标),输入风机总数t和聚类个数 k;
14.步骤103、随机初始化k个聚类中心坐标;
15.步骤104、利用k-means聚类算法迭代计算,以便将域内所有风机根据坐标位置分为k个聚类,并计算更新后的每个聚类的中心坐标ki;
16.步骤105、采用的目标函数使得每个聚类内所有风机到该聚类中心ki的平面距离之和最小;
17.步骤106、迭代计算后每个聚类的信息包含该聚类中心坐标和该聚类内风机编号及相应的风机地理坐标(二维坐标);
18.步骤107、通过粒子群或模拟退火算法,根据k个聚类中心的地理坐标(二维坐标),实现k个聚类中心间的巡检路径寻优规划。
19.作为优选的技术方案,所述第二层路径规划包括:
20.对于每个聚类和对应的聚类中心,首先以聚类中心作为无人机起飞起始点和返回换电点,以无人机从起飞到巡检完该聚类内所有风机叶片的所有路径之和为优化目标,以无人机剩余续航时间作为判断继续巡检还是返回换电的约束,然后通过粒子群算法对无人机聚类内巡检路线进行寻优,使规划路线在遍历该聚类内全部风电机组叶片的同时返回换电点的换电次数最小。
21.作为优选的技术方案,所述第二层路径规划具体包括以下步骤:
22.步骤201、获取第一层规划输出结果,即第ki个聚类中心坐标和该聚类内所有风机的编号,再获取该聚类中心点和该聚类内相应风机的高度坐标,其中聚类中心坐标为二维坐标,将二维坐标转换为三维坐标;
23.步骤202、设定巡检统一流程,包括上升、巡航、下降和巡检拍照;
24.步骤203、随机初始化巡检顺序,依次计算每台风机巡检路径,进而计算巡检完聚类内所有风机的路径之和s;
25.步骤204、采用粒子群算法对所有未检风机巡检路径之和s进行寻优,无人机按照寻优结果开始巡检;
26.步骤205、按设定流程开始巡检,包括上升、巡航、下降、巡检拍照;
27.步骤206、巡检完成一整片叶片;
28.步骤207、判断是否巡检完一整台风机叶片,若是,转至步骤210;若否,至步骤208;
29.步骤208、判断电池剩余续航时间是否大于巡检完下一片完整叶片所需时间,若是,至步骤209;若否,返回换电点换电;
30.步骤209、继续巡检下一片叶片,返回步骤206;
31.步骤210、判断电池剩余续航时间是否大于,上升、巡航、下降和巡检完下一台风机第一片叶片所需时间;若是,至步骤211;若否,返回换电点换电;
32.步骤211、继续巡检下一台风机,至步骤205。
33.作为优选的技术方案,所述的步骤203中所有风机的路径之和s的计算流程具体包括:
34.步骤2031、上升阶段:从起飞点以速度v1上升至巡航高度点h1,该绝对高度=该聚类内风机海拔最高值 风机塔筒高度 风机叶片长度 5米,该绝对高度称为巡航海拔,即其中hh为巡航海拔,为该聚类内风机海拔最高值,h
t
为风机塔筒高度,lb为风机叶片长度;
35.步骤2032、巡航阶段:在巡航高度,从聚类中心正上方点h1以速度v2匀速飞至目标风机正上方点h2的过程,该飞行长度其中为聚类中心经纬度坐标,为目标风机经纬度坐标;
36.步骤2033、下降阶段:从巡航高度点h2以速度v3下降至目标风机机舱中心位置o,该下降高度其中为目标风机海拔坐标;
37.步骤2034、巡检拍照阶段:以风机机舱中心位置为o起点,依次沿着每片叶片正反面进行一圈巡检拍照,巡检阶段路径l
x
=6
×
lb;
38.步骤2035、从起始点开始,到完成一整台风机巡检,无人机飞行路径为: s=hh l hd l
x
;
39.步骤2036、第ki个聚类内风机巡检优化目标为:其中n为该聚类内风机台数。
40.作为优选的技术方案,所述的步骤208具体包括:
41.无人机每检测完一片完整叶片后,根据剩余电量、叶片物理信息以及环境参数变量,自动计算并判断续航时间是否满足检测下一片完整叶片所需的时间,如是,继续;若否,返回换电点进行换电。
42.作为优选的技术方案,所述的步骤210具体包括:
43.无人机每检测完一整台风机叶片后,根据剩余电量、本台风机和下一台目标风机的地理信息、叶片物理信息以及环境参数变量,自动计算并判断续航时间是否满足无人机经过上升、巡航、下降过程并检测完下一片完整叶片所需的时间,如是,继续;若否,返回换电点进行换电。
44.作为优选的技术方案,所述的方法在寻优过程中,巡检路线确定后,无人机按照巡检路线飞行,飞行过程中通过搭载的高清摄像头对风电机组叶片表面进行拍照,然后采用图像识别目标检测的方法用于叶片表面故障诊断。
45.与现有技术相比,本发明具有以下优点:
46.1、本发明提出的风场全域自动化巡检路径规划方法,解决了风场内风机相隔较远、巡检通达困难等问题。通过k-means聚类算法,求解最少的无人机换电点,实现全域风机巡检全覆盖。
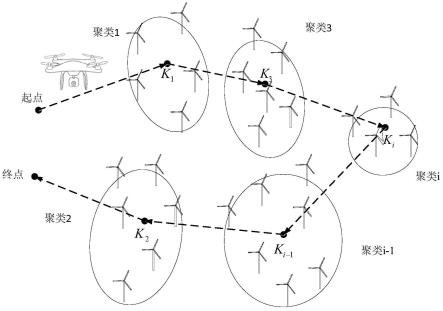
47.2、本发明采用了双层路径规划算法:第一层路径规划,实现了全场风机聚类分类,并对聚类中心间的巡检路径进行寻优;第二层路径规划,以聚类中心作为无人机起始点和
换电点,以无人机从起飞到巡检完该聚类内所有风机叶片的所有路径之和为主要优化目标,实现了各聚类内的巡检路径寻优。
48.3、第二层路径规划过程中,以无人机巡检完该聚类内所有风机路径之和为主要优化目标,以无人机剩余续航时间作为判断继续巡检还是返回换电的主要约束,通过粒子群算法等对无人机聚类内巡检路线进行寻优,使规划路线在遍历该聚类内全部风电机组叶片的同时返回换电点的换电次数最小,提升全域巡检效率的同时,使无人机的续航里程得以最大化利用。
附图说明
49.图1为本发明的聚类中心路径寻优示意图;
50.图2为本发明的风机巡检全过程示意图;
51.图3为本发明的第一层路径规划流程图;
52.图4为本发明的第二层路径规划流程图。
具体实施方式
53.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
54.本发明提出了一种风场全域内无人机巡检的路径规划方法,解决的问题是如何根据域内所有风机的坐标信息,利用k-means聚类算法将所有风机分为k个聚类,并计算每个聚类的中心ki坐标。然后利用粒子群算法或模拟退火算法等首先对k 个聚类中心进行聚类中心间的巡检路径规划,实现k个聚类区域间的巡检路径寻优,以最少的换电点实现风场巡检全覆盖。接着对于每个聚类和对应的聚类中心,研究以聚类中心作为无人机起飞起始点和返回换电点,以无人机从起飞到巡检完该聚类内所有风机叶片的所有路径之和为主要优化目标,以无人机剩余续航时间作为判断继续巡检还是返回换电的主要约束,通过粒子群算法等对无人机聚类内巡检路线进行寻优,使规划路线在遍历该聚类内全部风电机组叶片的同时返回换电点的换电次数最小。,无人机按照巡检路线飞行,飞行过程中通过搭载的高清摄像头对风电机组叶片进行拍照,然后采用图像识别目标检测方法用于叶片表面故障诊断。该方法在提高安全性的前提下节省了人工巡检过程中的时间成本和劳动成本,同时对域内所有风机的巡检路径进行了双层规划,提升全域巡检效率的同时,使无人机的续航里程得以最大化利用。
55.本发明基于无人机实现风场全域自动化巡检的路径规划方法,用于无人机对风场进行巡检规划,该方法包括:对全场风机聚类分类,对聚类中心间的巡检路径和聚类内所有风机叶片的所有巡检路径之和进行寻优,在此过程中,通过无人机搭载的高清摄像头对风电机组叶片进行拍照,然后采用图像识别方法用于叶片表面故障诊断。
56.该方法采用了双层路径规划算法,包括:第一层路径规划,实现了全场风机聚类分类,并对聚类中心间的巡检路径进行寻优;第二层路径规划,以聚类中心作为无人机起始点和换电点,以无人机从起飞到巡检完该聚类内所有风机叶片的所有路径之和为优化目标,
实现了各聚类内的巡检路径寻优。
57.如图1所示,所述的第一层路径规划具体包括:利用k-means聚类算法将所有风机分为k个聚类,并计算每个聚类的中心ki坐标;然后利用粒子群算法或模拟退火算法对k个聚类中心进行聚类中心间的巡检路径规划,实现k个聚类区域间的巡检路径寻优,以最少的换电点实现风场巡检全覆盖。
58.所述的第二层路径规划具体包括:对于每个聚类和对应的聚类中心,研究以聚类中心作为无人机起飞起始点和返回换电点,以无人机从起飞到巡检完该聚类内所有风机叶片的所有路径之和为优化目标,以无人机剩余续航时间作为判断继续巡检还是返回换电的约束,通过粒子群算法对无人机聚类内巡检路线进行寻优,使规划路线在遍历该聚类内全部风电机组叶片的同时返回换电点的换电次数最小。
59.如图3所示,所述的第一层路径规划具体包括以下步骤:
60.步骤1、获取风场内所有风机的地理坐标、风机塔筒高度、叶片长度物理信息;
61.步骤2、根据所有风机的地理坐标(二维坐标),输入风机总数t和聚类个数k;
62.步骤3、随机初始化k个聚类中心坐标;
63.步骤4、利用k-means聚类算法迭代计算,以便将域内所有风机根据坐标位置分为k个聚类,并计算更新后的每个聚类的中心坐标ki;
64.步骤5、目标函数是使得每个聚类内所有风机到该聚类中心ki的平面距离之和最小;
65.步骤6、迭代计算后每个聚类的信息包含该聚类中心坐标和该聚类内风机编号及相应的风机地理坐标(二维坐标);
66.步骤7、通过粒子群或模拟退火算法,根据k个聚类中心的地理坐标(二维坐标),实现k个聚类中心间的巡检路径寻优规划。
67.如图4所示,所述的第二层路径规划具体包括以下步骤:
68.步骤1、获取第一层规划输出结果,即第ki个聚类中心坐标(二维坐标)和该聚类内所有风机的编号,再获取该聚类中心点和该聚类内相应风机的高度坐标,将二维坐标转换为三维坐标;
69.步骤2、规定巡检统一流程:上升、巡航、下降和巡检拍照;
70.步骤3、随机初始化巡检顺序,依次计算每台风机巡检路径,进而计算巡检完聚类内所有风机的路径之和s;
71.步骤4、采用粒子群算法对所有未检风机巡检路径之和s进行寻优,无人机按照寻优结果开始巡检;
72.步骤5、按规定流程开始巡检:上升、巡航、下降、巡检拍照;
73.步骤6、巡检完成一整片叶片;
74.步骤7、判断是否巡检完一整台风机叶片,若是,转至步骤10;若否,至步骤 8;
75.步骤8、判断电池剩余续航时间是否大于巡检完下一片完整叶片所需时间,若是,至步骤9;若否,返回换电点换电;
76.步骤9、继续巡检下一片叶片,返回步骤6;
77.步骤10、判断电池剩余续航时间是否大于上升、巡航、下降、巡检完下一台风机第一片叶片所需时间;若是,至步骤11;若否,返回换电点换电;
78.步骤11、继续巡检下一台风机,至步骤5。
79.如图2所示,所述的步骤3中所有风机的路径之和s的计算流程具体包括:
80.步骤1、上升阶段:从起飞点(聚类中心)以速度v1上升至巡航高度点h1,该绝对高度=该聚类内风机海拔最高值 风机塔筒高度 风机叶片长度 5 米,该绝对高度称为巡航海拔,即其中hh为巡航海拔,为该聚类内风机海拔最高值,h
t
为风机塔筒高度,lb为风机叶片长度;
81.步骤2、巡航阶段:在巡航高度,从聚类中心正上方点h1以速度v2匀速飞至目标风机正上方点h2的过程,该飞行长度其中为聚类中心经纬度坐标,为目标风机经纬度坐标;
82.步骤3、下降阶段:从巡航高度点h2以速度v3下降至目标风机机舱中心位置o,该下降高度其中为目标风机海拔坐标;
83.步骤4、巡检拍照阶段:以风机机舱中心位置为o起点,依次沿着每片叶片正反面进行一圈巡检拍照,巡检阶段路径l
x
=6
×
lb;
84.步骤5、从起始点开始,到完成一整台风机巡检,无人机飞行路径为: s=hh l hd l
x
;
85.步骤6、第ki个聚类内风机巡检优化目标为:其中n为该聚类内风机台数。
86.所述的步骤8具体包括:无人机每检测完一片完整叶片后,根据剩余电量、叶片物理信息以及环境参数变量,自动计算并判断续航时间是否满足检测下一片完整叶片所需的时间,如是,继续;若否,返回换电点进行换电。
87.所述的步骤10具体包括:无人机每检测完一整台风机叶片后,根据剩余电量、本台风机和下一台目标风机的地理信息、叶片物理信息以及环境参数变量,自动计算并判断续航时间是否满足无人机经过上升、巡航、下降过程并检测完下一片完整叶片所需的时间,如是,继续;若否,返回换电点进行换电。
88.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。