技术特征:
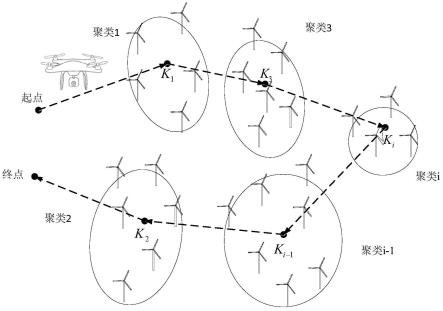
1.一种基于无人机实现风场全域自动化巡检的路径规划方法,其特征在于,该方法用于无人机对风场进行巡检规划,所述的方法包括对全场风机进行聚类,并对聚类中心间的巡检路径和聚类内风机叶片的所有巡检路径之和进行寻优。2.根据权利要求1所述的一种基于无人机实现风场全域自动化巡检的路径规划方法,其特征在于,该方法采用了双层路径规划算法,具体包括:第一层路径规划,实现了全场风机聚类分类,并对聚类中心间的巡检路径进行寻优;第二层路径规划,以聚类中心作为无人机起始点和换电点,以无人机从起飞到巡检完该聚类内所有风机叶片的所有路径之和为优化目标,实现了各聚类内的巡检路径寻优。3.根据权利要求2所述的一种基于无人机实现风场全域自动化巡检的路径规划方法,其特征在于,所述第一层路径规划包括:首先利用k-means聚类算法将所有风机分为k个聚类,并计算每个聚类的中心k
i
坐标;然后利用粒子群算法或模拟退火算法对k个聚类中心进行聚类中心间的巡检路径规划,实现k个聚类区域间的巡检路径寻优,以最少的换电点实现风场巡检全覆盖。4.根据权利要求3所述的一种基于无人机实现风场全域自动化巡检的路径规划方法,其特征在于,所述第一层路径规划具体包括以下步骤:步骤101、获取风场内所有风机的地理坐标、风机塔筒高度、叶片长度等物理信息;步骤102、根据所有风机的地理坐标,输入风机总数t和聚类个数k;步骤103、随机初始化k个聚类中心坐标;步骤104、利用k-means聚类算法迭代计算,以便将域内所有风机根据坐标位置分为k个聚类,并计算更新后的每个聚类的中心坐标k
i
;步骤105、采用的目标函数使得每个聚类内所有风机到该聚类中心k
i
的平面距离之和最小;步骤106、迭代计算后每个聚类的信息包含该聚类中心坐标和该聚类内风机编号及相应的风机地理坐标;步骤107、通过粒子群或模拟退火算法,根据k个聚类中心的地理坐标,实现k个聚类中心间的巡检路径寻优规划。5.根据权利要求2所述的一种基于无人机实现风场全域自动化巡检的路径规划方法,其特征在于,所述第二层路径规划包括:对于每个聚类和对应的聚类中心,首先以聚类中心作为无人机起飞起始点和返回换电点,以无人机从起飞到巡检完该聚类内所有风机叶片的所有路径之和为优化目标,以无人机剩余续航时间作为判断继续巡检还是返回换电的约束,然后通过粒子群算法对无人机聚类内巡检路线进行寻优,使规划路线在遍历该聚类内全部风电机组叶片的同时返回换电点的换电次数最小。6.根据权利要求5所述的一种基于无人机实现风场全域自动化巡检的路径规划方法,其特征在于,所述第二层路径规划具体包括以下步骤:步骤201、获取第一层规划输出结果,即第k
i
个聚类中心坐标和该聚类内所有风机的编号,再获取该聚类中心点和该聚类内相应风机的高度坐标,其中聚类中心坐标为二维坐标,将二维坐标转换为三维坐标;步骤202、设定巡检统一流程,包括上升、巡航、下降和巡检拍照;
步骤203、随机初始化巡检顺序,依次计算每台风机巡检路径,进而计算巡检完聚类内所有风机的路径之和s;步骤204、采用粒子群算法对所有未检风机巡检路径之和s进行寻优,无人机按照寻优结果开始巡检;步骤205、按设定流程开始巡检,包括上升、巡航、下降、巡检拍照;步骤206、巡检完成一整片叶片;步骤207、判断是否巡检完一整台风机叶片,若是,转至步骤210;若否,至步骤208;步骤208、判断电池剩余续航时间是否大于巡检完下一片完整叶片所需时间,若是,至步骤209;若否,返回换电点换电;步骤209、继续巡检下一片叶片,返回步骤206;步骤210、判断电池剩余续航时间是否大于上升、巡航、下降和巡检完下一台风机第一片叶片所需时间;若是,至步骤211;若否,返回换电点换电;步骤211、继续巡检下一台风机,至步骤205。7.根据权利要求6所述的一种基于无人机实现风场全域自动化巡检的路径规划方法,其特征在于,所述的步骤203中所有风机的路径之和s的计算流程具体包括:步骤2031、上升阶段:从起飞点以速度v1上升至巡航高度点h1,该绝对高度=该聚类内风机海拔最高值 风机塔筒高度 风机叶片长度 5米,该绝对高度称为巡航海拔,即其中h
h
为巡航海拔,为该聚类内风机海拔最高值,h
t
为风机塔筒高度,l
b
为风机叶片长度;步骤2032、巡航阶段:在巡航高度,从聚类中心正上方点h1以速度v2匀速飞至目标风机正上方点h2的过程,该飞行长度其中为聚类中心经纬度坐标,为目标风机经纬度坐标;步骤2033、下降阶段:从巡航高度点h2以速度v3下降至目标风机机舱中心位置o,该下降高度其中为目标风机海拔坐标;步骤2034、巡检拍照阶段:以风机机舱中心位置为o起点,依次沿着每片叶片正反面进行一圈巡检拍照,巡检阶段路径l
x
=6
×
l
b
;步骤2035、从起始点开始,到完成一整台风机巡检,无人机飞行路径为:s=h
h
l h
d
l
x
;步骤2036、第k
i
个聚类内风机巡检优化目标为:其中n为该聚类内风机台数。8.根据权利要求6所述的一种基于无人机实现风场全域自动化巡检的路径规划方法,其特征在于,所述的步骤208具体包括:无人机每检测完一片完整叶片后,根据剩余电量、叶片物理信息以及环境参数变量,自动计算并判断续航时间是否满足检测下一片完整叶片所需的时间,如是,继续;若否,返回换电点进行换电。9.根据权利要求6所述的一种基于无人机实现风场全域自动化巡检的路径规划方法,其特征在于,所述的步骤210具体包括:无人机每检测完一整台风机叶片后,根据剩余电量、本台风机和下一台目标风机的地
理信息、叶片物理信息以及环境参数变量,自动计算并判断续航时间是否满足无人机经过上升、巡航、下降过程并检测完下一片完整叶片所需的时间,如是,继续;若否,返回换电点进行换电。10.根据权利要求1所述的一种基于无人机实现风场全域自动化巡检的路径规划方法,其特征在于,所述的方法在巡检路线确定后,无人机按照巡检路线飞行,飞行过程中通过搭载的高清摄像头对风电机组叶片表面进行拍照,然后采用图像识别目标检测的方法用于叶片表面故障诊断。
技术总结
本发明涉及一种基于无人机实现风场全域自动化巡检的路径规划方法,该方法用于无人机对风场进行巡检规划,所述的方法包括对全场风机进行聚类,并对聚类中心间的巡检路径和聚类内风机叶片的所有路径之和进行寻优。与现有技术相比,本发明具有使规划路线在遍历该聚类内全部风电机组叶片的同时返回换电点的换电次数最小,提升全域巡检效率的同时,使无人机的续航里程得以最大化利用等优点。续航里程得以最大化利用等优点。续航里程得以最大化利用等优点。
技术研发人员:张世东 陈伟 王建国 尚天坤 黄新 高月锁 于延庆 秦威
受保护的技术使用者:上海电力新能源发展有限公司
技术研发日:2022.08.19
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。