1.本实用新型涉及机器人领域,具体是一种仿生机械人装置。
背景技术:
[0002]“仿生机器人”是指模仿生物、从事生物特点工作的机器人。
[0003]
1、现有技术的问题是仿生机器人爬行运动的时候自由度不好控制;
[0004]
2、现有的仿生机器人基本是通过锂电池供能,耗能较多,资源利用较为浪费。
[0005]
综上所述,需要对现有的结构进行改进。
技术实现要素:
[0006]
本实用新型的目的在于提供一种仿生机械人装置,以解决上述背景技术中提出的问题。
[0007]
为实现上述目的,本实用新型提供如下技术方案:
[0008]
一种仿生机械人装置,包括设备主体、爬行结构、爬行动力结构和供能结构;
[0009]
所述设备主体包括:
[0010]
箱体,用于安装电机,箱体中的电机用于驱动爬行结构;
[0011]
前躯板,用于安装爬行动力结构;
[0012]
侧面支撑,用于支撑爬行动力结构中的齿轮组件;
[0013]
下支撑,用于支撑前躯板。
[0014]
所述爬行结构包括:
[0015]
前腿,设置在前腿底部的小舵机,所述小舵机固定安装在前腿的底部;
[0016]
爪子,用于调节前腿的角度;
[0017]
轮子;
[0018]
所述爬行动力结构包括:
[0019]
小舵机,爪子由两个小舵机控制,其中一个小舵机控制抓取,另一个小舵机通过连杆二带动爪子实现角度调节;
[0020]
所述供能结构包括:
[0021]
太阳能板,用于收集太阳能对设备主体供能,太阳能板与推杆和大舵机通过铰接;
[0022]
大舵机,大舵机旋转带动太阳能板旋转,推杆伸缩顶起或放下太阳能板。
[0023]
作为本实用新型进一步的方案:设备主体上安装超声波探头,通过超声波探头对周围环境进行探测。
[0024]
作为本实用新型进一步的方案:所述爬行结构上设置用于安装轮子的轮子外壳,用于传动左右两个轮子的连杆一。
[0025]
作为本实用新型进一步的方案:所述爬行动力结构上设置传动杆、用于连接电机的驱动轴、转向用的锥齿轮和转向齿轮。
[0026]
作为本实用新型进一步的方案:转向齿轮由小电机带动转动使与其连接的轮子转
动,转向齿轮通过顶丝固定在轴上,通过法兰盘与轮子的外壳相接。
[0027]
作为本实用新型进一步的方案:所述功能结构设置转动支撑,用于支撑供能结构的各个组件,转动支撑安装在前躯板的上方,所述供能结构设置板支撑,板支撑安装在转动支撑的上方。
[0028]
与现有技术相比,本实用新型的有益效果是:
[0029]
1、通过本实用新型设计的爬行运动将多自由运动机构单自由度化达到了很好的控制和结构简化;
[0030]
2、太阳能翻版机构调节使太阳能实现角度和方向调节,最大限度接受光照高效利用太阳能资源,实现节能环保高效利用资源。
附图说明
[0031]
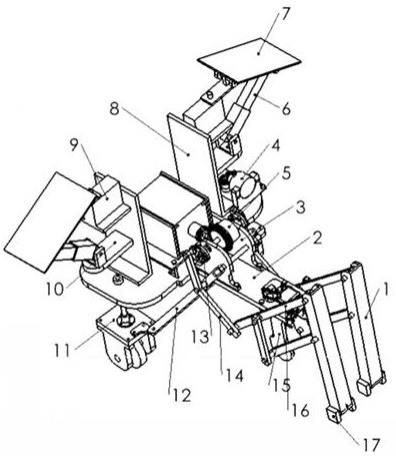
图1为仿生机械人装置的结构示意图。
[0032]
图2为仿生机械人装置的另一侧示意图。
[0033]
图中:1-前腿、2-前躯板、3-侧面支撑、4-超声波探头、5-锥齿轮、6
‑ꢀ
推杆、7-太阳能板、8-板支撑、9-大舵机、10-转动支撑、11-轮子外壳、12
‑ꢀ
连杆一、13-法兰盘、14-连杆二、15-下支撑、16-爪子、17-小舵机、18-轮子、19-轴承、20-转向齿轮、21-小轮、22-销。
具体实施方式
[0034]
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
[0035]
请参阅图1-2,一种仿生机械人装置,包括设备主体、爬行结构、爬行动力结构和供能结构;
[0036]
所述设备主体包括:
[0037]
箱体,用于安装电机,箱体中的电机用于驱动爬行结构;
[0038]
前躯板2,用于安装爬行动力结构;
[0039]
侧面支撑3,用于支撑爬行动力结构中的齿轮组件;
[0040]
下支撑15,用于支撑前躯板2。
[0041]
所述爬行结构包括:
[0042]
前腿1,设置在前腿底部的小舵机17,所述小舵机17固定安装在前腿1 的底部;
[0043]
爪子16,用于调节前腿1的角度;
[0044]
轮子18,用于安装轮子18的轮子外壳11,用于传动左右两个轮子18的连杆一12。
[0045]
所述爬行动力结构包括:
[0046]
传动杆,用于连接电机的驱动轴和转向用的锥齿轮5,转向齿轮20,转向齿轮20由小电机带动转动使与其连接的轮子18转动,转向齿轮20通过顶丝固定在轴上,通过法兰盘13与轮子18的外壳相接;
[0047]
小舵机17,爪子16由两个小舵机17控制,其中一个小舵机17控制抓取,另一个小舵机17通过连杆二14带动爪子16实现角度调节。
[0048]
所述供能结构包括:
[0049]
转动支撑10,用于支撑供能结构的各个组件,转动支撑10安装在前躯板 2的上方;
[0050]
太阳能板7,用于收集太阳能对设备主体供能,太阳能板7与推杆6和大舵机9通过
铰接;
[0051]
板支撑8,板支撑8安装在转动支撑10的上方;
[0052]
大舵机9,大舵机9旋转带动太阳能板7旋转,推杆6伸缩顶起或放下太阳能板7。
[0053]
设备主体上安装超声波探头4,通过超声波探头4对周围环境进行探测。
[0054]
本实用新型的工作原理是:前腿1与连杆二14通过销22进行连接,箱体中的电机转动带动齿轮3啮合旋转带动各个杆(包括连杆一12和连杆二14) 运动实现爬行动作,可满足一定的跨域距离和跨越高度,转向齿轮20由小电机带动转动使与其连接的轮子18转动,转向齿轮20通过顶丝固定在轴上,通过法兰盘13与轮子18的外壳相接,通过连杆一12带动另一个轮子18实现一起转向,爪子16由两个小舵机17控制,其中一个小舵机17控制抓取,另一个小舵机17通过连杆二14带动爪子16实现角度调节,太阳能板7与推杆6和大舵机9通过铰接,大舵机9旋转带动太阳能板7旋转,推杆6伸缩顶起或放下太阳能板7。通过本实用新型设计的爬行运动将多自由运动机构单自由度化达到了很好的控制和结构简化;太阳能翻版机构调节使太阳能实现角度和方向调节,最大限度接受光照高效利用太阳能资源,实现节能环保高效利用资源。
[0055]
上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下做出各种变化。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
