技术特征:
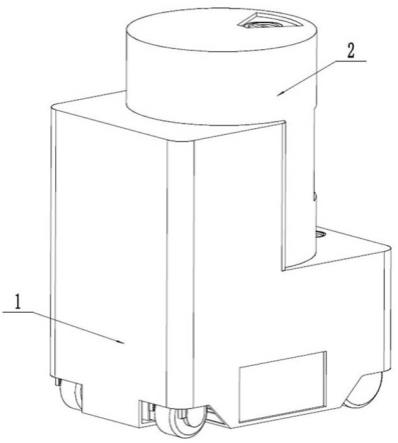
1.一种基于室内感知的多功能轮式巡检机器人,包括驱动消杀外壳(1),所述驱动消杀外壳(1)上设置有消防外壳(2),驱动消杀外壳(1)内设置有驱动组件、从动组件以及消杀组件,其特征在于:所述消防外壳(2)内设置有用于灭火的灭火组件,所述驱动消杀外壳(1)和消防外壳(2)组成机器人本体外壳,机器人本体外壳上设置有视觉系统以及热成像系统;所述从动组件包括设置在驱动消杀外壳(1)内的从动驱动缸(7),从动驱动缸(7)的输出端与驱动连接架(8)连接,驱动连接架(8)滑动设置在驱动消杀外壳(1)内,且驱动连接架(8)下侧穿过驱动消杀外壳(1)底面,驱动连接架(8)下侧两端分别转动设置有一个转向轮(13),每个转向轮(13)上均设置有一组刹车定位组件,驱动连接架(8)上还设置有支撑组件;所述刹车定位组件包括设置在驱动连接架(8)上的连杆滑槽,连杆滑槽与转向轮(13)位置对应,连杆滑槽内滑动设置有刹车连杆一(9)和刹车连杆二(10),刹车连杆一(9)和刹车连杆二(10)对称设置,刹车连杆一(9)和刹车连杆二(10)顶端均设置有一个滑块,刹车连杆一(9)和刹车连杆二(10)顶端的滑块滑动设置在刹车连杆滑槽(11)内,刹车连杆滑槽(11)设置在驱动消杀外壳(1)前侧内壁上,刹车连杆滑槽(11)包括两条限位滑槽,两条限位滑槽之间的距离由上至下变小,刹车连杆一(9)和刹车连杆二(10)底端分别设置有刹车定位片二(15)和刹车定位片一(14),刹车定位片一(14)和刹车定位片二(15)与转向轮(13)接触配合;所述支撑组件包括对称设置在驱动消杀外壳(1)内的两个支撑驱动齿条(12),两个支撑驱动齿条(12)分别与一个支撑驱动齿轮(17)配合,支撑驱动齿轮(17)转动设置在支撑固定架(16)上,支撑固定架(16)设置在驱动连接架(8)上,支撑固定架(16)向下穿过驱动消杀外壳(1)底面,支撑固定架(16)上对称转动设置有两个支架(19),两个支架(19)的转轴分别与一个传动皮带(18)的一端连接,两个传动皮带(18)的另一端分别与一个支撑驱动齿轮(17)连接,且对称设置在支撑固定架(16)左右两侧。2.根据权利要求1所述的一种基于室内感知的多功能轮式巡检机器人,其特征在于:所述驱动组件包括驱动器(5)和驱动轮(6),驱动器(5)设置在驱动消杀外壳(1)内,驱动器(5)与两个驱动轮(6)连接,两个驱动轮(6)设置在驱动器(5)两侧,驱动器(5)的驱动方式为差速驱动。3.根据权利要求1所述的一种基于室内感知的多功能轮式巡检机器人,其特征在于:所述消杀组件包括设置在驱动消杀外壳(1)内的消杀驱动缸(20),消杀驱动缸(20)的输出端与驱动连接杆(21)连接,驱动连接杆(21)滑动设置在导杆(22)上,导杆(22)设置在驱动消杀外壳(1)内,在驱动消杀外壳(1)的两侧均滑动设置有一个滑门(23),驱动消杀外壳(1)上配合滑门(23)的位置开口,两个滑门(23)分别与一组滑门组件连接,两组滑门组件分别连接在驱动连接杆(21)的两侧,驱动消杀外壳(1)内设置有消毒箱(24),消毒箱(24)下端设置有输出管(31),输出管(31)上设置有电控阀一(30),所述滑门组件上还设置有消杀喷头组件。4.根据权利要求3所述的一种基于室内感知的多功能轮式巡检机器人,其特征在于:消毒箱(24)顶面上设置有消毒箱添加口(3),驱动消杀外壳(1)上与消毒箱添加口(3)相对应的位置处开口,消毒箱(24)内部设置有液位传感器。5.根据权利要求3所述的一种基于室内感知的多功能轮式巡检机器人,其特征在于:所
述滑门组件包括一端转动设置在驱动连接杆(21)上的滑门连杆一(25),滑门连杆一(25)另一端转动设置在滑门连接座(26)上,滑门连接座(26)滑动设置在连接座滑槽(28)内,连接座滑槽(28)整体呈“凵”形,滑门连接座(26)滑动设置在连接座滑槽(28)的水平段上,滑门连接座(26)上还转动设置有滑门连杆二(27)一端,滑门连杆二(27)另一端转动设置在滑门驱动块(32)上,滑门驱动块(32)滑动设置在连接座滑槽(28)的竖直段上,滑门驱动块(32)与滑门(23)连接,所述滑门连杆一(25)、滑门连接座(26)、滑门连杆二(27)、连接座滑槽(28)以及滑门驱动块(32)均设置有两组,且关于驱动连接杆(21)对称设置,两组零件内部相对应的连接关系相同,两个滑门连接座(26)之间连接有连接板(29),连接板(29)上设置有消杀喷头组件。6.根据权利要求5所述的一种基于室内感知的多功能轮式巡检机器人,其特征在于:所述消杀喷头组件设置在连接板(29)上的消杀固定架(33),消杀固定架(33)上设置有消杀喷管(34),消杀喷管(34)一端设置有喷管接入口(35),消杀喷管(34)另一端设置有喷头(36),喷管接入口(35)开口朝上并且通过软管与输出管(31)连接,喷头(36)开口朝下。7.根据权利要求1所述的一种基于室内感知的多功能轮式巡检机器人,其特征在于:所述灭火组件包括设置在驱动消杀外壳(1)内的灭火驱动电机(37),灭火驱动电机(37)的输出轴向上穿过消防外壳(2)底面与驱动齿轮一(38)连接,驱动齿轮一(38)转动设置在消防外壳(2)内,驱动齿轮一(38)与驱动齿轮二(39)配合,驱动齿轮二(39)转动设置在中心固定轴(41)上,中心固定轴(41)设置在消防外壳(2)内底部中心位置上,驱动齿轮二(39)与驱动圆盘(40)同轴固定连接,驱动圆盘(40)位于驱动齿轮二(39)上侧,消防外壳(2)内设置有水箱(43),水箱(43)底部设置有电控泵(44),电控泵(44)通过连接管一(45)与机械臂组件连接,机械臂组件设置在水箱(43)上,水箱(43)设置在驱动圆盘(40)上。8.根据权利要求7所述的一种基于室内感知的多功能轮式巡检机器人,其特征在于:所述水箱(43)顶面上设置有水箱添加口(4),驱动消杀外壳(1)上与水箱添加口(4)初始位置相对应的位置处开口,水箱(43)内设置有液位传感器。9.根据权利要求7所述的一种基于室内感知的多功能轮式巡检机器人,其特征在于:所述机械臂组件同轴固定设置在中心固定轴(41)顶端的中心固定齿轮(42),中心固定齿轮(42)与同步带驱动齿轮(46)配合,同步带驱动齿轮(46)设置在驱动转轴(47)底端,驱动转轴(47)转动设置在灭火安装架(48)上,灭火安装架(48)设置在水箱(43)上,驱动转轴(47)顶端设置有驱动锥齿轮一(49),驱动锥齿轮一(49)与驱动锥齿轮二(50)配合,驱动锥齿轮二(50)与同步带(51)一端连接,同步带(51)设置在灭火安装架(48)上,同步带(51)下侧的带上通过同步带压板连接有喷头连接座(55),喷头连接座(55)上转动连接有机械臂二(54)一端,机械臂二(54)另一端与机械臂一(53)一端转动连接,机械臂一(53)另一端转动设置在水箱连接座(52)上,机械臂一(53)和机械臂二(54)内置水管,水箱连接座(52)设置在灭火安装架(48)上,水箱连接座(52)通过连接管一(45)与电控泵(44)连接,喷头连接座(55)下侧连接有连接管二(57)一端,连接管二(57)另一端与喷嘴(60)连接,喷嘴(60)设置在头部转轴(59)上,头部转轴(59)转动设置在头部转架(58)上,头部转轴(59)与转轴驱动电机(61)的输出轴连接,转轴驱动电机(61)设置在头部转架(58)上,头部转架(58)转动设置在延伸架(56)上,头部转架(58)与转架驱动电机(62)的输出轴连接,转架驱动电机(62)设置在延伸架(56)上,延伸架(56)设置在喷头连接座(55)上。
技术总结
本发明公开一种基于室内感知的多功能轮式巡检机器人,涉及巡检机器人技术领域,包括驱动消杀外壳,所述驱动消杀外壳上设置有消防外壳,驱动消杀外壳内设置有驱动组件、从动组件以及消杀组件,所述消防外壳内设置有用于灭火的灭火组件,所述驱动消杀外壳和消防外壳组成机器人本体外壳,机器人本体外壳上设置有视觉系统以及热成像系统。本发明设置的从动组件能够使机器人自动上下电动扶梯,并且在电梯上将轮子自动锁死,同时提供支撑防止机器人本体在电梯上倾翻造成事故,本发明能够基于机器人本体外壳上设置的机器视觉系统以及热成像系统等功能对当前环境内异常高温地点进行识别,如发现火情进行自动灭火。如发现火情进行自动灭火。如发现火情进行自动灭火。
技术研发人员:曹国良 曹卫平 彭晓康
受保护的技术使用者:陕西国瑞安防技术有限公司
技术研发日:2022.10.11
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。