1.本公开涉及中和装置。
背景技术:
2.法律禁止将高ph(氢离子指数)的废水直接排放。因此,需要中和高ph的废水,使ph降低至排放基准值。高ph的废水有使水泥与水接触而产生的废水等。
3.作为中和上述废水的技术,公开了具备喷流装置、ph传感器和回流装置的中和装置(例如,专利文献1)。专利文献1的喷流装置中,向从原水槽导入的原水(废水)供给二氧化碳,产生涡流而引起气穴现象(cavitation),使原水混合搅拌。ph传感器测定从喷流装置排出的原水的ph。当ph传感器的检测结果超过排放基准值时,回流装置使从喷流装置排出的原水回流到原水槽。
4.现有技术文献
5.专利文献
6.专利文献1:日本实用新型注册第3147769号公报
技术实现要素:
7.发明所要解决的课题
8.在上述中和装置中,期望开发出能够高效地中和废水的技术。
9.鉴于这样的课题,本公开的目的在于提供一种能够高效地中和废水的中和装置。
10.用于解决课题的方法
11.为了解决上述课题,本公开的一个方式的中和装置具备设置有流入口和排出口的中和部、通过流入口向中和部供给废水的废水供给部、向容纳于中和部的废水供给平均粒径为2.5mm以下的二氧化碳的气泡的鼓泡部、设置于中和部中的流入口与排出口之间的第一ph传感器、设置于中和部中的第一ph传感器的设置部位与排出口之间的第二ph传感器以及基于第一ph传感器和第二ph传感器中的任一方或双方的测定值来控制由鼓泡部供给的二氧化碳的量的控制部。
12.另外,中和部也可以具备设置有流入口和排出口并容纳废水的中和槽和设置于中和槽内的分隔板。
13.另外,控制部也可以切换稳定运转模式和非稳定运转模式,上述稳定运转模式中,至少基于第二ph传感器的测定值来控制由鼓泡部供给的二氧化碳的量,上述非稳定运转模式中,至少基于第一ph传感器的测定值来控制由鼓泡部供给的二氧化碳的量。
14.根据本公开,能够高效地中和废水。
附图说明
15.[图1]图1是说明实施方式的中和装置的图。
[0016]
[图2]图2是说明实施方式的中和方法的处理流程的流程图。
[0017]
[图3]图3a是示出进行实施方式的中和方法时的中和前的废水、ph传感器的测定值的ph的变化的图;图3b是说明进行了实施方式的中和方法的情况下的二氧化碳的供给量的变化的图。
[0018]
[图4]图4是稳定运转模式执行处理中的pid控制的框线图。
[0019]
[图5]图5是说明稳定运转模式执行处理中的中和槽内的ph的分布的图像的图。
[0020]
[图6]图6是说明流入中和槽的废水的ph上升且鼓泡部的二氧化碳的供给量不变化时的中和槽内的ph的分布的图像的图。
[0021]
[图7]图7是向非稳定运转模式切换后的pid控制的框线图。
[0022]
[图8]图8是说明非稳定运转模式执行处理中的中和槽内的ph的分布的图像的图。
具体实施方式
[0023]
在下文中,将参照附图详细描述本公开的实施方式。实施方式所示的尺寸、材料、其他具体的数值等只不过是用于容易理解的例示,除了特别说明的情况以外,并不限定本公开。需要说明的是,在本说明书和附图中,用相同的附图标记表示具有实质相同的功能、构成的要素,并且省略对这些要素的重复说明。另外,与本公开没有直接关系的要素省略图示。
[0024]
[中和装置100]
[0025]
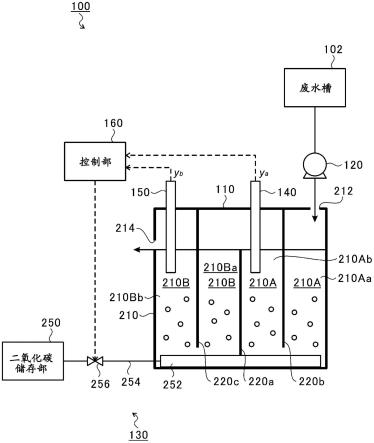
图1是说明本实施方式的中和装置100的图。如图1所示,中和装置100包括中和部110、泵120、鼓泡部130、ph传感器140、150和控制部160。需要说明的是,图1中,实线的箭头表示废水的流动。另外,在图1中,虚线的箭头表示信号的流动。
[0026]
中和部110包括中和槽210和分隔板220a~220c。中和槽210是收容废水的容器。在中和槽210的一端侧设置有流入口212。在中和槽210的另一端侧设置有排出口214。在本实施方式中,流入口212形成于中和槽210的上表面。另外,排出口214形成于中和槽210的侧面。
[0027]
分隔板220a~220c设置在中和槽210内。分隔板220a设置于中和槽210中的流入口212与排出口214之间。分隔板220a从中和槽210的底面竖立设置。分隔板220a的上端与中和槽210的上表面分离。因此,中和槽210内被分隔板220a划分为区域210a和区域210b。
[0028]
分隔板220b设置于中和槽210中的流入口212与分隔板220a之间。分隔板220c设置于中和槽210中的分隔板220a与排出口214之间。分隔板220b、220c从中和槽210的上表面竖立设置(垂直向下)。分隔板220b、220c的下端与中和槽210的底面分离。因此,区域210a被分隔板220b划分为区域210aa和区域210ab。另外,区域210b被分隔板220c划分为区域210ba和区域210bb。
[0029]
泵120(废水供给部)的吸入侧与废水槽102连接。泵120的排出侧与中和部110的流入口212连接。泵120通过流入口212向区域210aa供给废水(原水)。
[0030]
鼓泡部130向容纳于中和部110的废水供给平均粒径(平均气泡直径)为2.5mm以下的二氧化碳的气泡。鼓泡部130优选供给平均粒径小于1mm的二氧化碳的气泡。
[0031]
在本实施方式中,鼓泡部130包括二氧化碳储存部250、散气板252、连接管254和流量调整阀256。
[0032]
二氧化碳储存部250储存二氧化碳。二氧化碳储存部250例如是二氧化碳储气瓶。
二氧化碳储气瓶储存被高压压缩的二氧化碳。
[0033]
散气板252设置于中和槽210的底面。散气板252由多孔质体构成。多孔质体由树脂、玻璃、陶瓷、金属、浮石构成。
[0034]
连接管254将二氧化碳储存部250与散气板252连接。流量调整阀256设置于连接管254。流量调整阀256通过后述的控制部160调整开度。关于控制部160对流量调整阀256的开度调整,在后面详细叙述。
[0035]
ph传感器140(第一ph传感器)设置在中和部110中的流入口212与排出口214之间。在本实施方式中,ph传感器140设置于区域210ab。ph传感器140测定区域210ab的废水的ph。以下,将ph传感器140的测定值(输出值)设为ya。
[0036]
ph传感器150(第二ph传感器)设置在中和部110中的ph传感器140的设置部位与排出口214之间。在本实施方式中,ph传感器150设置在排出口214的附近。即,ph传感器150设置于区域210bb。ph传感器150测定区域210bb的废水的ph。以下,将ph传感器150的测定值(输出值)设为yb。
[0037]
即,ph传感器140设置在比ph传感器150更靠废水的流动方向的上游侧。换言之,ph传感器140测定比ph传感器150更靠上游侧的废水的ph。
[0038]
控制部160由包含cpu(中央处理装置)的半导体集成电路构成。控制部160从rom读出用于使cpu自身动作的程序、参数等。控制部160与作为工作区的ram、其他电子电路协作来管理和控制中和装置100整体。
[0039]
在本实施方式中,控制部160基于ph传感器140和ph传感器150的测定值来调整流量调整阀256的开度。详细情况后述,在ph传感器140的测定值ya的变动量小的情况下,控制部160以稳定运转模式控制鼓泡部130。另一方面,在ph传感器140的测定值ya的变动量大的情况下,控制部160以非稳定运转模式控制鼓泡部130。稳定运转模式是基于ph传感器150的测定值yb来控制由鼓泡部130供给的二氧化碳的量的模式。非稳定运转模式是基于ph传感器140的测定值ya来控制由鼓泡部130供给的二氧化碳的量的模式。
[0040]
[中和方法]
[0041]
接着,对使用了上述中和装置100的废水的中和方法进行说明。需要说明的是,中和装置100的泵120从废水槽102向中和部110供给废水。
[0042]
图2是说明本实施方式的中和方法的处理流程的流程图。图3a是示出进行本实施方式的中和方法时的中和前的废水、ph传感器140的测定值ya、ph传感器150的测定值yb的ph的变化的图。图3b是说明进行了本实施方式的中和方法的情况下的二氧化碳的供给量的变化的图。需要说明的是,在以图3a、图3b为首的以下的图中,r表示设定值,y
a’表示ph传感器140的测定值ya的平均值,u表示通过鼓泡部130供给的二氧化碳的流量(操作量)。
[0043]
如图2所示,本实施方式的中和方法包括稳定运转模式执行处理s110、传感器值稳定判定处理s120、平均值存储处理s130、变动判定处理s140、非稳定运转模式执行处理s150、时间经过判定处理s160、稳定运转模式执行处理s170以及平均值存储处理s180。以下,对各处理进行说明。
[0044]
[稳定运转模式执行处理s110]
[0045]
控制部160在稳定运转模式下控制鼓泡部130。具体而言,控制部160调整流量调整阀256的开度,以使ph传感器150的测定值yb成为规定的设定值r。设定值r是排放基准值以
下的规定值。
[0046]
图4是稳定运转模式执行处理s110中的pid控制的框线图。在本实施方式中,如图4所示,控制部160进行pid控制。控制部160将目标值设为设定值r,将输出值设为测定值yb。此外,在以图4为首的以下的图中,t表示时间,e表示(r(t)-yb(t))。另外,k
p
表示比例增益,ki表示积分增益,kd表示微分增益。k
p
、ki、kd能够由用户适当调整。
[0047]
图5是说明稳定运转模式执行处理s110中的中和槽210内的ph的分布的图像的图。当控制部160进行稳定运转模式执行处理s110时,通过鼓泡部130向废水供给二氧化碳。由此,废水被中和,随着距流入口212的距离变大,废水的ph降低。具体而言,废水从流入口212向排出口214流动。因此,如图5所示,中和槽210内的ph随着从流入口212朝向排出口214而逐渐减小。另外,从排出口214排出的废液的ph成为设定值r。
[0048]
[传感器值稳定判定处理s120]
[0049]
控制部160判定ph传感器140的测定值ya是否稳定。其结果是,在判定为ph传感器140的测定值ya稳定的情况下(s120中的“是”),控制部160将处理转移至平均值存储处理s130。另一方面,在判定为ph传感器140的测定值ya不稳定的情况下(s120中的“否”),在维持基于ph传感器150的测定值yb的稳定运转模式的状态下,控制部160反复进行该传感器值稳定判定处理s120。
[0050]
控制部160例如判定每规定的单位时间(例如,1分钟)的测定值ya的标准偏差是否低于规定的稳定阈值。而且,在判定为测定值ya的标准偏差低于稳定阈值的情况下,控制部160判定为ph传感器140的测定值ya稳定。
[0051]
[平均值存储处理s130]
[0052]
控制部160例如计算ph传感器140的测定值ya稳定的期间的每规定时间(例如,1分钟)的测定值ya的平均值y
a’。然后,控制部160将平均值y
a’存储在未图示的存储器中。
[0053]
[变动判定处理s140]
[0054]
控制部160判定ph传感器140的测定值ya的变动量是否大。在本实施方式中,控制部160判定当前的ph传感器140的测定值ya与在平均值存储处理s130中计算出的平均值y
a’之差(测定值y
a-平均值y
a’)是否超过规定的切换阈值δ(例如,1)。
[0055]
图6是说明流入中和槽210的废水的ph上升且鼓泡部130的二氧化碳的供给量不变化时的中和槽210内的ph的分布的图像的图。图6中,实线表示流入中和槽210的废水(原水)的ph上升且鼓泡部130的二氧化碳的供给量不变化时的中和槽210内的ph的分布。另外,图6中,虚线表示稳定运转模式((测定值y
a-平均值y
a’)为切换阈值δ以下的情况)下的中和槽210内的ph的分布。
[0056]
0≤(测定值y
a-平均值y
a’)≤δ时,即测定值ya的上升变动量小时,如图6中虚线所示,从排出口214排出的废水的ph为设定值r。因此,在判定为(测定值y
a-平均值y
a’)不超过切换阈值δ的情况下(s140中的“否”),控制部160将处理转移到稳定运转模式执行处理s170。需要说明的是,在(测定值y
a-平均值y
a’)《0的情况下,即,在测定值ya降低的情况下,即使继续稳定运转模式执行处理s170,测定值yb也会低于设定值r,因此不会产生问题。
[0057]
另一方面,在(测定值y
a-平均值y
a’)》δ的情况下,即测定值ya的上升变动量大(检测到ph的增大)的情况下,如图6中实线所示,从排出口214排出的废水的ph会超过设定值r。因此,在判定为(测定值y
a-平均值y
a’)超过切换阈值δ的情况下(s140中的“是”),控制部160
将处理转移到非稳定运转模式执行处理s150(从稳定运转模式切换为非稳定运转模式,参照图3a)。
[0058]
[非稳定运转模式执行处理s150]
[0059]
返回图2进行说明,控制部160在变动判定处理s140中判定为ph传感器140的测定值ya的变动量大的情况下(s140中的“是”),从稳定运转模式切换为非稳定运转模式,控制鼓泡部130。具体而言,控制部160调整流量调整阀256的开度,以使ph传感器140的测定值ya成为在平均值存储处理s130中计算出的平均值y
a’。
[0060]
图7是向非稳定运转模式切换后的pid控制的框线图。在本实施方式中,控制部160在非稳定运转模式执行处理s150中也与稳定运转模式执行处理s110同样地进行pid控制。此外,如图7所示,在非稳定运转模式执行处理s150中,控制部160将目标值设为平均值y
a’,将输出值设为测定值ya。
[0061]
图8是说明非稳定运转模式执行处理s150中的中和槽210内的ph的分布的图像的图。图8中,虚线表示稳定运转模式中的中和槽210内的ph的分布的图像。当控制部160进行非稳定运转模式执行处理s150时,通过鼓泡部130向废水供给比稳定运转模式执行处理s110更大量的二氧化碳(参照图3b)。另外,在非稳定运转模式执行处理s150中,控制部160调整流量调整阀256的开度,以使ph传感器140的测定值ya成为在平均值存储处理s130中算出的平均值y
a’。因此,如图8中实线所示,ph传感器150的测定值yb,即从排出口214排出的废液的ph成为设定值r以下。
[0062]
[时间经过判定处理s160]
[0063]
返回图2进行说明,控制部160判定从切换为非稳定运转模式起是否经过了规定的非稳定运转时间。其结果是,在判定为经过了非稳定运转时间的情况下(s160中的“是”),控制部160将处理转移到稳定运转模式执行处理s110。另一方面,在判定为未经过非稳定运转时间的情况下(s160中的“否”),控制部160反复进行时间经过判定处理s160。需要说明的是,非稳定运转时间例如基于收容于中和槽210中的废水的体积v(m3)和由泵120供给的废水的流量q(m3/分钟)来确定。在本实施方式中,非稳定运转时间为废水的体积v/废水的流量q(分钟)。
[0064]
[稳定运转模式执行处理s170]
[0065]
控制部160与上述稳定运转模式执行处理s110同样地调整流量调整阀256的开度,以使ph传感器150的测定值yb成为规定的设定值r。
[0066]
[平均值存储处理s180]
[0067]
控制部160与上述平均值存储处理s130同样地,计算稳定运转模式下的每规定时间(例如,1分钟)的测定值ya的平均值y
a’。然后,控制部160将平均值y
a’覆盖到存储器中。之后,控制部160将处理转移到变动判定处理s140。
[0068]
如以上说明的那样,本实施方式的中和装置100和使用该中和装置的中和方法具备鼓泡部130。鼓泡部130将平均粒径为2.5mm以下的二氧化碳的气泡(包括微米气泡或纳米气泡)供给至废水。因此,与通过喷流装置或喷射器导入二氧化碳的现有技术相比,鼓泡部130能够延长废水中的二氧化碳的滞留时间。即,中和装置100能够延长废水与二氧化碳的接触时间。因此,中和装置100能够提高二氧化碳在废水中的溶解效率。由此,中和装置100能够连续且高效地对废水进行中和。
[0069]
另外,与现有技术相比,鼓泡部130能够增大二氧化碳的比表面积。因此,中和装置100能够提高二氧化碳在废水中的溶解效率。
[0070]
另外,与现有技术相比,中和装置100能够显著缩短废水的中和所需的时间。因此,与现有技术相比,中和装置100能够以少量的二氧化碳进行中和反应。因此,中和装置100能够降低中和所需的二氧化碳的成本。
[0071]
另外,中和装置100具有中和部110,中和部110具备中和槽210和分隔板220a~220c。由此,与不具备分隔板220a~220c的现有技术相比,中和装置100能够延长废水的滞留时间。由此,中和装置100能够延长二氧化碳的泡与废水的接触时间。
[0072]
另外,假设在设为仅具备ph传感器150的构成(仅稳定运转模式)的情况下,若中和前的废水的ph发生变动,则无法使二氧化碳的供给量变化直至由ph传感器150检测到ph的变动为止。另外,中和前的废水虽然没有ph的变动,但若变化为难以被二氧化碳中和的组成,则无法使二氧化碳的供给量变化直至由ph传感器150检测到ph的变动为止。因此,在构成为仅具备ph传感器150的情况下,会暂时性发生无法将中和后的废水的ph设为设定值r以下的情况。
[0073]
与此相对,本实施方式的中和装置100除了ph传感器150以外,还具备ph传感器140。由此,中和装置100能够在ph传感器150检测到ph的变动之前,ph传感器140检测到中和前的废水的ph的变动。而且,中和装置100在ph传感器140的测定值ya的变动量变大的情况下从稳定运转模式向非稳定运转模式切换。因此,即使中和前的废水的ph的变动量变大,中和装置100也能够可靠地使中和后的废水的ph为设定值r以下。
[0074]
以上,参照附图对实施方式进行了说明,但本公开当然不限定于上述实施方式。只要是本领域技术人员,显然能够在权利要求书所记载的范畴内想到各种变更例或修正例,这些变更例或修正例当然也属于本公开的技术范围。
[0075]
例如,在上述实施方式中,例举了中和部110具备中和槽210和分隔板220a~220c的构成。但是,并不限定于中和部110的构成。例如,中和部110可以仅具备1个中和槽210。另外,中和部也可以具备使多个中和槽210、1个中和槽210的排出口214和与该1个中和槽210相邻的中和槽210的流入口212连通的机构。在该情况下,对每个中和槽210设置散气板252。具备多个中和槽210的中和部能够适当变更中和槽210的数量。因此,具备多个中和槽210的中和部能够改变废水的中和处理能力。另外,具备多个中和槽210的中和部能够将多个中和槽210模块化。因此,具备多个中和槽210的中和部能够削减制造成本和设计成本。
[0076]
另外,在上述实施方式中,例举了流入口212形成于中和槽210的上表面、排出口214形成于中和槽210的侧面的情况。但是,流入口212及排出口214的位置没有限定。例如,流入口212也可以形成于中和槽210的底面。在该情况下,分隔板220a可以从中和槽210的上表面竖立设置(垂直向下),分隔板220b、220c可以从中和槽210的底面竖立设置。
[0077]
另外,在上述实施方式中,作为废水供给部,例举了泵120。但是,废水供给部只要能够通过流入口212向中和部110供给废水即可,对构成没有限定。例如,废水供给部也可以预先将废水槽102配置在比流入口212更靠上方的位置,具备将废水槽102的下部与流入口212连接的配管。另外,废水供给部也可以在该配管中具备流量调整阀。
[0078]
另外,在上述实施方式中,例举了二氧化碳储存部250为二氧化碳储气瓶的情况。这样,通过采用二氧化碳储气瓶作为二氧化碳储存部250,从而鼓泡部130即使不使用泵也
能够压送二氧化碳。需要说明的是,二氧化碳储存部250也可以是储存大气压的二氧化碳或压缩率低的二氧化碳的储存部,或是生成大气压的二氧化碳或压缩率低的二氧化碳的生成装置。在该情况下,鼓泡部130包含泵而构成,通过驱动泵来从二氧化碳储存部250向连接管254(散气板252)压送二氧化碳即可。
[0079]
另外,在上述实施方式中,例举了鼓泡部130具备1个散气板252的构成。但是,散气板252的数量没有限定。另外,鼓泡部130也可以具备散气管来代替散气板252。
[0080]
另外,在上述实施方式中,例举了控制部160计算ph传感器140的测定值ya的平均值y
a’的构成。但是,控制部160也可以计算最近的每规定时间(例如,1分钟)的测定值ya的中央值。在该情况下,控制部160判定当前的ph传感器140的测定值ya与计算出的中央值之差(测定值y
a-中央值)是否超过规定的切换阈值δ(例如,1)即可。
[0081]
另外,控制部160在非稳定运转模式执行处理s150中,例如也可以将流量调整阀256的开度设为全开。
[0082]
另外,在上述实施方式中,例举了控制部160进行pid控制的情况。但是,控制部160只要能够基于第一ph传感器和第二ph传感器中的任一方或双方的测定值来控制由鼓泡部供给的二氧化碳的量,则控制方法没有限定。控制部160例如可以进行pi控制、i-pd控制或双自由度pid控制。
[0083]
另外,控制部160也可以代替时间经过判定处理s160而执行传感器值稳定判定处理s120。
[0084]
产业上的可利用性
[0085]
本公开可以用于中和装置。
[0086]
符号说明
[0087]
100:中和装置,110:中和部,120:泵(废水供给部),130:鼓泡部,140:ph传感器(第一ph传感器),150:ph传感器(第二ph传感器),160:控制部,210:中和槽,212:流入口,214:排出口,220a:分隔板,220b:分隔板,220c:分隔板。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。