1.本发明涉及汽车救援技术领域,尤其涉及一种基于供电拖钩结构的救援方法及救援系统。
背景技术:
2.随着国内汽车市场的不断发展,现较大、中型汽车维修公司和服务公司都已经推出了自己的汽车救援服务,如果车主遇到故障,例如突然不能启动、熄火后无法启动、没油、没电甚至路途中爆胎等,可以联系最近的汽车救援服务公司赶往现场进行救助。
3.现有技术中的汽车救助方式为通过拖拽的方式将待救援车辆拉至救援站后,对其进行补能或故障维修。然而,需要补能的待救援车辆在拖拽过程中,由于汽车能量不足会影响车身内如医疗设备等需要供电的设备等其他正常功能的使用;当出现的故障为软件级故障时,待救援车辆只有在被运输至救援站后,才能对车辆出现的软件级故障进行排查和维修,影响用户对车辆的使用时间。
4.因此,需要提供一种在救援拖动过程中同步实现对待救援车辆的补能功能并且当待救援车辆的故障为软件级故障时可以缩短维修时间的救援方法来解决上述技术问题。
技术实现要素:
5.为了解决上述技术问题,本发明提供了一种基于供电拖钩结构的救援方法。解决了现有技术中在拖拽过程中由于汽车能量不足影响车身其他设备正常使用或待救援车辆只有在被运输至救援站后才能对车辆出现的软件级故障进行排查和维修,耽误用户正常使用车辆的技术问题。
6.本发明的技术效果通过如下实现的:
7.一种基于供电拖钩结构的救援方法,包括:
8.接收目标车辆的充电救援信息;
9.根据所述充电救援信息确定目标车辆对应的目标救援位置;
10.获取可调度的救援车辆以确定目标救援车辆;
11.当目标救援车辆到达目标救援位置时,发送到达提醒至用户端,以提醒用户将目标救援车辆的供电拖钩与目标车辆的充电挂钩连接;
12.发送出发指令并控制目标救援车辆开始供电,以控制目标救援车辆拖拽目标车辆向救援站行驶,并对目标车辆进行充电。通过目标救援车辆的供电拖钩与目标车辆的充电挂钩连接,实现了目标车辆和目标救援车辆之间机械连接和功能性电连接,使得在对目标车辆拖拽的过程中能够同步实现对目标车辆的补能,有效缩短了目标车辆到达救援站的补能时间,并且解决了拖拽过程中因为能量不足导致的需要供电的车身医疗级别设备等无法正常使用的问题。
13.进一步地,获取可调度的救援车辆以确定目标救援车辆,之前包括:
14.根据充电救援信息生成订单信息;
15.将订单信息发送至目标车辆对应的用户端,以使用户端可以通过订单信息监测救援过程。
16.进一步地,获取可调度的救援车辆以确定目标救援车辆,包括:
17.将订单信息发送至距离目标车辆最近的救援站;
18.获取所述救援站内处于空闲状态的救援车辆,以确定出目标救援车辆。
19.进一步地,所述充电救援信息包括车辆型号和车身重量数据,获取所述救援站内处于空闲状态的救援车辆,以确定出目标救援车辆,包括:
20.获取目标车辆的车辆型号和车身重量数据;
21.基于所述目标车辆的车辆型号和车身重量数据从处于空闲状态的救援车辆选出能够对目标车辆进行救援的可调度的救援车辆,以获取可调度的救援车辆的位置。
22.进一步地,发送到达提醒至用户端,之后包括:
23.当用户对目标救援车辆验证完成后,发送开启指令控制车辆的拖勾口盖开启,以从目标救援车辆的拖勾口盖内弹出所述供电拖钩;
24.发送充电准备指令至用户端,以提醒用户端将所述供电拖钩固定在所述充电挂钩上实现目标救援车辆对目标车辆充电。
25.进一步地,发送出发指令并控制目标救援车辆开始供电,之前包括:
26.检测是否收到目标车辆的补能确认请求;
27.当接收到目标车辆的补能确认请求时,判断为所述供电拖钩和所述充电挂钩完成固定连接并实现电连接。
28.进一步地,还包括:
29.获取目标救援车辆的实时电量和距离救援站的实时剩余里程;
30.根据所述实时剩余里程得到目标救援车辆的的电量阈值;
31.当所述实时电量到达所述电量阈值时,发送电量提醒至用户端,以提醒用户控制目标车辆的发出补能结束请求。
32.进一步地,还包括:
33.接收所述目标车辆的数据传输请求;
34.发送数据接收指令至所述目标救援车辆,以控制所述目标救援车辆接收目标车辆的问题数据并对其分析以得到所述目标车辆的故障原因。
35.进一步地,还包括:
36.当所述目标救援车辆无法得到所述目标车辆的故障原因时,控制所述目标救援车辆将所述问题数据生成维修订单,并将其发送至所述救援站。通过目标救援车辆接收目标车辆的问题数据,使得在对目标车辆拖拽的过程中可以通过目标救援车辆或救援站对问题数据进行分析,从而使得在拖拽目标车辆的过程中可以同步生成解决方案,节约了故障诊断的时间。
37.另外,还提供一种基于供电拖钩结构的救援系统,其特征在于,包括:
38.救援信息接收模块:用于接收目标车辆的充电救援信息;
39.救援位置确定模块:用于根据所述充电救援信息确定目标车辆对应的目标救援位置;
40.救援车辆确定模块:用于获取可调度的救援车辆以确定目标救援车辆;
41.到达提醒发送模块:用于当目标救援车辆到达目标救援位置时,发送到达提醒至用户端,以提醒用户将目标救援车辆的供电拖钩与目标车辆的充电挂钩连接;
42.供能控制模块:用于发送出发指令并控制目标救援车辆开始供电,以控制目标救援车辆拖拽目标车辆向救援站行驶,并对目标车辆进行充电。
43.如上所述,本发明具有如下有益效果:
44.1)通过目标救援车辆的供电拖钩与目标车辆的充电挂钩连接,实现了目标车辆和目标救援车辆之间机械连接和功能性电连接,使得在对目标车辆拖拽的过程中能够同步实现对目标车辆的补能,有效缩短了目标车辆到达救援站的补能时间,并且解决了拖拽过程中因为能量不足导致的需要供电的车身医疗级别设备等无法正常使用的问题。
45.2)通过目标救援车辆接收目标车辆的问题数据,使得在对目标车辆拖拽的过程中可以通过目标救援车辆或救援站对问题数据进行分析,从而使得在拖拽目标车辆的过程中可以同步生成解决方案,节约了故障诊断的时间。
附图说明
46.为了更清楚地说明本发明的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还能够根据这些附图获得其它附图。
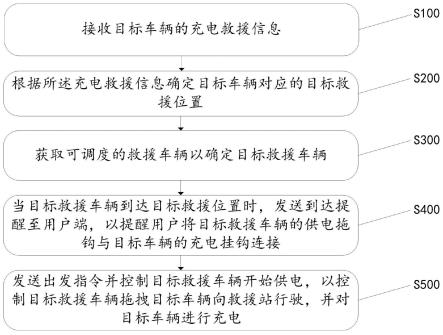
47.图1为本说明书实施例提供的一种基于供电拖钩结构的救援方法的流程图;
48.图2为本说明书实施例提供的供电拖钩结构的结构示意图;
49.图3为本说明书实施例提供的一种基于供电拖钩结构的救援系统的组成框图。
50.其中,图中附图标记对应为:
51.供电拖钩1、承压缆绳2、压缩弹簧3、定位槽4、支撑件41、拖钩口盖5、双向旋转电机6。
具体实施方式
52.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
53.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
54.实施例1:
55.如图1所示,本说明书实施例提供了一种基于供电拖钩结构的救援方法,包括:
56.s100:接收目标车辆的充电救援信息;
57.s200:根据所述充电救援信息确定目标车辆对应的目标救援位置;
58.本实施例中,提供一种基于供电拖钩结构的救援系统,救援系统包括云端控制中心、救援车辆和用户端,救援车辆和用户端均与云端控制中心通讯连接,用户端为用户的移动终端云端控制中心用于当接收到目标车辆,即待救援车辆的发出的充电救援信息时,调度救援车辆前往待救援车辆的目标救援位置,即等待救援位置进行救援。
59.其中,充电救援信息包括目标救援位置、待救援车辆的车辆型号和车身重量数据,目标车辆设有第一电量阈值,当目标车辆的实时电量低于第一电量阈值时,则判断为目标车辆的电量即将消耗完,此时目标车辆会自动发出充电救援信息至云端控制中心请求救援。其中,第一电量阈值可以由本领域技术人员自行设定。
60.s300:获取可调度的救援车辆以确定目标救援车辆;
61.一种的具体的实施方式中,步骤s300获取可调度的救援车辆的位置,获取可调度的救援车辆以确定目标救援车辆,之前包括:
62.根据充电救援信息生成订单信息;
63.将订单信息发送至目标车辆对应的用户端,以使用户端可以通过订单信息监测救援过程。
64.具体地,订单信息还包括目标车辆发送的充电救援信息的实时发送状态,当发送成功时目标救援车辆是否派出等救援过程信息,用户端通过订单信息查看所述实时发送状态和是否派出救援车辆。
65.具体地,云端控制中心在确定目标救援车辆后,在目标救援车辆上生成的订单二维码,以便于当目标救援车辆到达等待救援地点时,用户端对订单二维码进行扫描验证,当验证通过后,则判断当前车辆为目标救援车辆。
66.一种具体的实施方式中,获取可调度的救援车辆以确定目标救援车辆,包括:
67.将订单信息发送至距离目标车辆最近的救援站;
68.获取所述救援站内处于空闲状态的救援车辆,以确定出目标救援车辆。
69.一种具体的实施方式中,获取所述救援站内处于空闲状态的救援车辆,以确定出目标救援车辆,包括:
70.获取目标车辆的车辆型号和车身重量数据;
71.基于所述目标车辆的车辆型号和车身重量数据从处于空闲状态的救援车辆选出能够对目标车辆进行救援的可调度的救援车辆,以确定出目标救援车辆。
72.具体地,根据目标车辆的车辆型号,可以确定其尺寸规格,以选用具有匹配的尺寸规格的可调度的救援车辆为目标救援车辆,同时,目标救援车辆的最大承重需大于车身重量数据。其中,车身重量数据为车身重量与最大载重之和。
73.s400:当目标救援车辆到达目标救援位置时,发送到达提醒至用户端,以提醒用户将目标救援车辆的供电拖钩与目标车辆的充电挂钩连接;
74.一种具体的实施方式中,发送到达提醒至用户端,之后包括:
75.当用户对目标救援车辆验证完成后,发送开启指令控制车辆的拖勾口盖开启,以从目标救援车辆的拖勾口盖内弹出所述供电拖钩;
76.发送充电准备指令至用户端,以提醒用户端将所述供电拖钩固定在所述充电挂钩
上实现目标救援车辆对目标车辆充电。
77.本实施例中,目标车辆的充电挂钩设于目标车辆的车身头部,所述供电拖钩的弹出基于目标救援车辆车身内部的动态脱钩结构实现的,所述动态脱钩结构设置在车身尾部,如图2所示,动态脱钩结构包括供电拖钩1、承压缆绳2、收卷机构和压缩弹簧3,承压缆绳2一端固定并缠绕在收卷机构上,承压缆绳2另一端和供电拖钩1固定连接,车身内部设有定位槽4,压缩弹簧3外径和定位槽4的宽度匹配,压缩弹簧3和供电拖钩1设于定位槽4内,定位槽4内壁上设有支撑件41,车身表面设有拖钩口盖5,拖钩口盖5设于定位槽4上方,压缩弹簧3套设固定在承压缆绳2上且压缩弹簧3上靠近拖钩口盖5的一端与承压缆绳2和供电拖钩1的连接点固定连接,动态脱钩结构设置为当拖钩口盖5处于闭合状态时压缩弹簧3处于压缩状态以使压缩弹簧3底部抵接于支撑件41且供电拖钩1抵接在拖钩口盖5上;当拖钩口盖5开启时处于压缩状态的压缩弹簧3恢复原始形状带动供电拖钩1沿着定位槽4的长度方向从定位槽4中弹出。
78.具体地,拖钩口盖5所在平面垂直于地面,定位槽4为矩形凹槽,定位槽4的深度方向平行于地面,位于车身左侧和车身右侧的定位槽4的深度方向垂直于车辆的行驶方向,位于车身尾部和车身头部的定位槽4的深度方向和车辆的行驶方向一致。位于定位槽4中的压缩弹簧1恢复未压缩的原始形状过程中产生的弹力和定位槽4的深度方向一致。
79.需要说明的是,本技术通过在车身内部设置动态脱钩结构,使得在车辆行驶状态出现异常或车辆失去控制时,能够开启拖钩口盖5使处于压缩状态的压缩弹簧3产生恢复弹力,从而带动供电拖钩1从车身内部迅速弹出,以使飞出的供电拖钩1钩住周围的固定物体上,从而将车辆固定至安全区域,保护用户安全,有效降低了车辆行驶在盘山公路时发生意外情况导致车辆跌落悬崖的风险。
80.具体地,收卷机构为双向旋转电机6,所述双向旋转电机6用于当其输出轴按照第一预设方向转动时释放所述承压缆绳2,按照第二预设方向转动时收卷所述承压缆绳2。其中,第一预设方向、第二预设方向分别为图2中的顺时针方向和逆时针方向。
81.具体地,承压缆绳2上远离供电拖钩1的一端固定在输出轴上后,按照图2中的顺时针方向缠绕在输出轴上,当弹出供电供电拖钩1时,通过输出轴按照顺时针方向转动释放缠绕在输出轴上承压缆绳2;当需要将供电供电拖钩1收回至原位时,通过输出轴按照逆时针方向转动将释放的承压缆绳2缠绕在输出轴上以完成承压缆绳2的收回,以便于后续发生意外状况时再次使用。
82.其中,承压缆绳2的释放长度可以通过云端控制中心设定的目标救援车辆的停靠位置和等待救援位置之间的距离进行释放;也可以通过用户根据目标救援车辆的停靠位置自行设定承压缆绳2的释放长度,发送至云端控制中心,从而控制目标救援车辆承压缆绳2释放对应长度,以完成对应释放长度的承压缆绳2的释放。
83.s500:发送出发指令并控制目标救援车辆开始供电,以控制目标救援车辆拖拽目标车辆向救援站行驶,并对目标车辆进行充电。
84.一种具体的实施方式中,发送出发指令并控制目标救援车辆开始供电,之前包括:
85.检测是否收到目标车辆的补能确认请求;
86.当接收到目标车辆的补能确认请求时,判断为所述供电拖钩和所述充电挂钩完成固定连接并实现电连接。
87.具体地,当目标救援车辆的供电拖钩与目标车辆的充电挂钩连接后,目标车辆的中控大屏上弹出补能确认窗口等待用户确认,当用户点击确认后,目标车辆会发送补能确认请求至云端控制中心,云端控制中心控制目标救援车辆的供电拖钩开始通电,以实现通过充电挂钩对目标车辆的进行充电。
88.一种具体的实施方式中,本技术的基于供电拖钩结构的救援方法还包括:
89.获取目标救援车辆的实时电量和距离救援站的实时剩余里程;
90.根据所述实时剩余里程得到目标救援车辆的的电量阈值;
91.当所述实时电量到达所述电量阈值时,发送电量提醒至用户端,以提醒用户控制目标车辆的发出补能结束请求。
92.具体地,通过实时获取拖拽过程的剩余里程,得到电量阈值,即至少需要保证目标救援车辆的实时电量大于电量阈值,才能保证在目标救援车辆有足够的电力将目标车辆拖拽至救援站。
93.一种具体地实施方式中,本技术的基于供电拖钩结构的救援方法,还包括:
94.接收所述目标车辆的数据传输请求;
95.发送数据接收指令至所述目标救援车辆,以控制所述目标救援车辆接收目标车辆的问题数据并对其分析以得到所述目标车辆的故障原因。
96.一种具体地实施方式中,本技术的基于供电拖钩结构的救援方法,还包括:
97.当所述目标救援车辆无法得到所述目标车辆的故障原因时,控制所述目标救援车辆将所述问题数据生成维修订单,并将其发送至所述救援站。
98.具体地,当目标救援车辆的供电拖钩与目标车辆的充电挂钩连接后,目标车辆的中控大屏上弹出的补能确认窗口中包含两个选项,一个是仅补能,另一个是选择信任,当用户点击仅补能的选项时,则只实现补能郭晨;当用户点击选择信任后,云端调度中心控制目标救援车辆接收目标车辆的问题数据,以通过目标救援车辆的处理器进行分析,以判断目标车辆的故障原因;
99.当目标救援车辆无法得到所述目标车辆的故障原因时,将问题数据生成维修订单发送至救援站,使得在拖拽救援的过程中,目标救援车辆或救援站可以同步分析问题数据,以尽快得到解决方案,节约了故障排查时间,便于用户尽快使用目标车辆。
100.如图3所示,本说明书实施例中提供了一种基于供电拖钩结构的救援系统,包括:
101.救援信息接收模块601:用于接收目标车辆的充电救援信息;
102.救援位置确定模块602:用于根据所述充电救援信息确定目标车辆对应的目标救援位置;
103.救援车辆确定模块603:用于获取可调度的救援车辆以确定目标救援车辆;
104.到达提醒发送模块604:用于当目标救援车辆到达目标救援位置时,发送到达提醒至用户端,以提醒用户将目标救援车辆的供电拖钩与目标车辆的充电挂钩连接;
105.供能控制模块605:用于发送出发指令并控制目标救援车辆开始供电,以控制目标救援车辆拖拽目标车辆向救援站行驶,并对目标车辆进行充电。
106.虽然本发明已经通过优选实施例进行了描述,然而本发明并非局限于这里所描述的实施例,在不脱离本发明范围的情况下还包括所作出的各种改变以及变化。
107.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部
件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
108.在不冲突的情况下,本文中上述实施例及实施例中的特征能够相互结合。
109.以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。