技术特征:
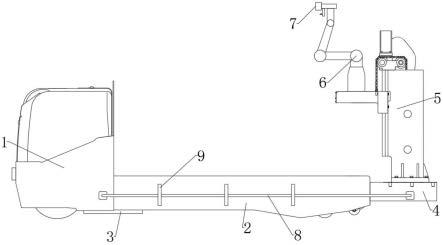
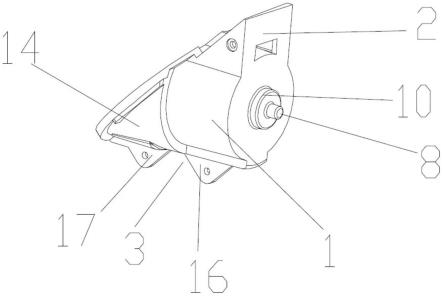
1.一种工业物流机器人,其特征在于:包括载货车厢(2),所述载货车厢(2)的一端安装有集成了agv导航与控制系统的导航车头(1),所述载货车厢(2)的另一端安装有车尾托台(4),所述车尾托台(4)上方安装有高度调节器(5),所述导航车头(1)与所述车尾托台(4)之间设置有复合电缆线(8),所述导航车头(1)与所述高度调节器(5)通过所述复合电缆线(8)电连接,所述高度调节器(5)上靠近所述载货车厢(2)的一侧安装有六轴机械手(6),所述六轴机械手(6)的末端安装有安装模块(7);所述高度调节器(5)包括空心立柱筒体(501),所述空心立柱筒体(501)顶部成型有通孔一(509)和通孔二(510),所述空心立柱筒体(501)的内壁上安装有与所述导航车头(1)电连接的pcl控制器(502),所述空心立柱筒体(501)的上方安装有传动箱(504),所述传动箱(504)上方安装有电机(503),所述传动箱(504)上安装有链条(505),所述链条(505)的一端与升降座(507)相连接,所述链条(505)的另一端与设置于所述空心立柱筒体(501)内部的配平模块(506)相连接,所述升降座(507)通过导轨(508)安装于所述空心立柱筒体(501)的侧壁上,所述pcl控制器(502)通过设置于所述通孔一(509)内的电缆与所述电机(503)电连接。2.根据权利要求1所述的一种工业物流机器人,其特征在于:所述载货车厢(2)与所述车尾托台(4)通过螺栓可拆卸的连接在一起。3.根据权利要求1所述的一种工业物流机器人,其特征在于:所述导航车头(1)与所述载货车厢(2)之间的底部安装有可拆卸的配重块(3)。4.根据权利要求3所述的一种工业物流机器人,其特征在于:所述配重块(3)为电磁铁,所述配重块(3)距离地面十到十五厘米。5.根据权利要求1所述的一种工业物流机器人,其特征在于:所述复合电缆线(8)通过多个等距设置的粘带(9)固定黏贴在所述载货车厢(2)侧壁上。6.根据权利要求1所述的一种工业物流机器人,其特征在于:所述配平模块(506)与所述链条(505)通过挂钩可拆卸的连接在一起,所述配平模块(506)为空桶。
技术总结
本实用新型公开了一种工业物流机器人,包括载货车厢,所述载货车厢的一端安装有集成了AGV导航与控制系统的导航车头,所述载货车厢的另一端安装有车尾托台,所述车尾托台上方安装有高度调节器,所述导航车头与所述车尾托台之间设置有复合电缆线,所述导航车头与所述高度调节器通过所述复合电缆线电连接,所述高度调节器上靠近所述载货车厢的一侧安装有六轴机械手,所述六轴机械手的末端安装有安装模块;该种工业物流机器人,可以通过对现有工业物流机器人进行外部改装的方式,实现可控调节工业物流机器人抓取货物高度的目的,使工业物流机器人能够从更高的货架上装卸货,降低了推广成本,实现物流运输过程中更高效的空间利用率。率。率。
技术研发人员:谢应畴 何春霞
受保护的技术使用者:广东中顺信息科技有限公司
技术研发日:2022.08.12
技术公布日:2022/10/21
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。