1.本发明涉及一种宏微结合的五轴联动飞秒激光加工装备,属于激光加工制造技术领域。
背景技术:
2.航天器关键功能部件制造是新型航天器研制的关键,也是影响航天器性能和水平的重要因素。航天器功能部件呈现工序复杂、精度要求高、加工尺度范围广、小批量多品种等特点,这对航天器零部件的加工方法、装备提出了很高的要求。此外,非均质材料在航天器关键功能部件中得到广泛应用,这也给航天器零部件的加工带来更大挑战。
3.飞秒激光具有脉冲能量高、热积累少、加工精度高、材料无污染等优点,可以有效实现对难加工材料及非均质材料的高精度加工,在航空航天领域发挥着重要作用。而将飞秒激光加工技术与高档数控机床相结合,有助于满足大型卫星天线蒙皮透气孔阵列、对日定向装置上/下滚环等航空航天零部件的切边与制孔加工需求,也可扩展到其它复杂航天零件。
4.国内五轴激光加工设备在构型设计上无法满足航天领域大型复杂构件的跨尺度加工需求,且未能充分考虑激光加工的技术特征,这也限制了加工装备的精度和柔性。目前可检索到的相关专利主要包括:(1)“一种五轴联动激光加工装备”(申请号:cn201010240139.5),该发明结构尺寸紧凑,无法实现宏微复合的跨尺度加工;(2)“一种七轴五联动超快激光加工系统”(申请号:cn201910275979.6),该发明对数控机床与激光加工技术的结合较简单,无法解决激光制孔锥度等问题。
技术实现要素:
5.本发明要解决的技术问题是:如何实现对航天典型复杂零件大范围空间切边及制孔的跨尺度、高精度加工。
6.为了解决上述技术问题,本发明的技术方案是提供了一种宏微结合的五轴联动飞秒激光加工装备,包括床身,床身的底部设有用于支撑床身的竖直立柱,其特征在于,所述的床身上设有x向导轨,x向导轨上设有可沿x向移动的横梁,横梁上设有y向导轨,y向导轨上设有可沿横梁长度方向移动的y轴运动单元,y轴运动单元上设有可竖直移动的z轴进给单元,z轴进给单元的末端设有可绕z轴旋转的c轴旋转单元,c轴旋转单元的下端设有b轴旋转单元;b轴旋转单元上设有光束旋进整形单元,光束旋进整形单元连接振镜加工头。
7.优选地,所述的c轴旋转单元包括基座,基座上设有第一力矩电机,第一力矩电机的转动端穿过基座并与z轴进给单元固定连接。
8.优选地,所述的b轴旋转单元通过第二力矩电机连接光束旋进整形单元。
9.优选地,所述的光束旋进整形单元包括光束整形模块和旋切模块,光束整形模块与旋切模块通过光轴接通,旋切模块通过光轴与振镜加工头接通。
10.优选地,所述的旋切模块与振镜加工头之间的光束通路上设有用于将旋切模块出
来的光束反射至振镜加工头内的反射镜。
11.本发明针对大型构件跨尺度柔性加工需求,通过结合五轴机械运动系统和高速高精度振镜加工头,采用五轴机械运动系统实现大范围激光束定位与姿态调整,采用振镜实现局部区域高速高精度加工,结合光束旋进整形技术,能够实现宏微运动结合,实现对航天典型复杂零件大范围空间切边及制孔的高精度加工。同时充分考虑激光加工特征,采用光束旋进整形技术对飞秒激光光束整形并转化为旋切光束,能够有效提高入射激光精度控制并减少打孔时的加工锥度。克服了入射光精度和加工锥度控制问题,可满足大型复杂构件的跨尺度加工,对象适用性高,柔性强。
12.与现有技术相比,本发明具体具有以下优点及特色:
13.总体布局上,提出宏微运动结合的五轴联动激光加工装备新构型。利用五轴机械运动系统实现大范围激光束定位与姿态调整,通过振镜加工头实现局部区域高速高精度加工,能够满足100μm~5000mm范围跨尺度加工需求。
14.激光光源采用飞秒激光器,用来产生用于加工的激光脉冲光束,激光的脉冲宽度在飞秒时间尺度。
15.针对飞秒激光加工的技术特征,在b轴旋转单元安装光束旋进整形单元,用于光束旋进整形并引导光路进入振镜加工头,有效提高入射激光精度,增加微孔加工时的锥度可控性,也能够提高加工微孔的深径比。
16.采用模块化设计,x、y、z、b、c轴均为独立的运动单元,便于本发明装备的设计、开发和维护。
17.x、y、z轴运动单元均采用直线光栅进行闭环控制;c轴旋转单元和b轴旋转单元均采用半闭环控制,使用旋转式脉冲编码器和力矩电机驱动,提高加工精度。
18.本发明装备定位精度可达5um。
19.综上所述,本发明提供的五轴联动飞秒激光加工装备,能够实现空间任意位姿定位、具有光束旋进整形功能,并且能实现跨尺度高精度加工。
附图说明
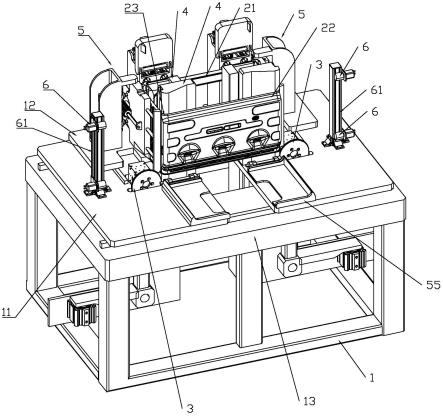
20.图1为一种宏微结合的五轴联动飞秒激光加工装备的整体结构示意图;
21.图2为b轴旋转单元、c轴旋转单元的示意图;
22.图3为光束旋进整形单元的示意图。
具体实施方式
23.为使本发明更明显易懂,兹以优选实施例,并配合附图作详细说明如下。
24.本发明提供了一种宏微结合的五轴联动飞秒激光加工装备,用于实现复杂构件的跨尺度柔性加工,可满足微孔、开槽和表面织构等微细特征加工,也可满足平面类和复杂空间零件等大范围加工需求。如图1所示,其包括竖直立柱1和安装于其上方的床身2,床身2四周均固定有竖直立柱1,床身2的上表面上设有x向导轨3,x向导轨3上设有可沿x向(即x向导轨3的长度方向)水平移动的横梁4,本发明装备加工材料时,通过横梁4的移动实现x轴移动和定位。横梁4侧方安装有y向导轨5,y向导轨5上安装有可沿横梁4长度方向水平移动的y轴运动单元6,加工材料时,通过y轴运动单元6的移动实现y轴移动定位。y轴运动单元6上安装
有可竖直移动的z轴进给单元7,加工材料时,通过z轴进给单元7的移动实现z轴移动定位。z轴进给单元7的末端安装可绕z轴旋转的c轴旋转单元8。c轴旋转单元8的侧下端安装有b轴旋转单元9。加工材料时,通过旋转单元8和旋转单元9的转动实现旋转轴移动,从而实现大范围定位与姿态调整。由上述xyzbc五轴定位后,飞秒激光光束通过b轴旋转单元9上的光束旋进整形单元13。光束旋进整形单元13用于对飞秒激光光束的旋进整形并引导光路进入光束旋进整形单元13下方的振镜加工头14,最终由振镜加工头14实现局部区域高精度加工。
25.如图1、图2所示,c轴旋转单元8包括基座10,基座10上安装有第一力矩电机11,第一力矩电机11的转动端穿过基座10并与z轴进给单元7固定连接。b轴旋转单元9上安装第二力矩电机12,第二力矩电机12连接光束旋进整形单元13。
26.如图3所示,光束旋进整形单元13包括光束整形模块15和旋切模块16,光束整形模块15与旋切模块16通过光轴接通,旋切模块16通过光轴与振镜加工头14接通,旋切模块16与振镜加工头14之间的光束通路上设有反射镜17,用于将旋切模块16出来的光束反射至振镜加工头14内。本实施例中,旋切模块16通过光轴连接一个反射镜17,一个反射镜17通过光轴连接另一个反射镜17,另一个反射镜17通过光轴连接振镜加工头14。光轴内即为光束通路。
27.飞秒激光经过整形模块15后对光束整形。此后进入旋切模块16,光束变为如图3所示旋切光束,再由反射镜17引导进入振镜加工头14。
28.横梁4、y轴运动单元6、z轴进给单元7的运动方向相互垂直,床身2、横梁4、y轴运动单元6上均设置有导轨安装面。
29.x、y、z轴上的运动单元(即横梁4、y轴运动单元6、z轴进给单元7)均采用直线光栅反馈进行闭环控制;c轴旋转单元8、b轴旋转单元9均采用半闭环控制,使用旋转式脉冲编码器。
30.本实施例中,振镜加工头14采用德国scanlab型振镜,具有高速高精度加工功能。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。