1.本发明涉及工件打磨技术领域,特别是涉及一种干水磨一体工作站及其使用方法。
背景技术:
2.打磨一般指借助粗糙物体(含有较高硬度颗粒物的砂纸等)来通过摩擦改变材料表面物理性能的一种加工方法,主要目的是为了获取特定表面粗糙度。根据打磨的要求不同,打磨工艺主要分为干磨和水磨两种。现有的打磨设备多为专用打磨工作站,无法同时具备进行水磨和干磨两种工艺处理结构,灵活性差,不能满足产品加工的多样性需求。此外,现有的打磨作业大多为裸露在工作环境中进行,对环境的影响较大,同时对设备的使用寿命以及相关操作人员具有较大的危害。
技术实现要素:
3.基于此,本发明的目的在于,提供一种干水磨一体工作站,其可进行干磨和水磨处理,能满足不同产品的加工需求,同时减少对外部环境的污染以及对操作人员身体健康的危害。
4.本发明是通过以下技术方案实现的:
5.一种干水磨一体工作站,包括密封舱,设置在所述密封舱内的机器人、第一工作台、除尘单元和净水单元;所述第一工作台的上方设置有第一喷水管,所述第一工作台上设有第一通孔;所述机器人设置在密封舱内的底板上,并通过安装在自由端的加工治具对所述第一工作台上的工件进行打磨加工;所述除尘单元设置在所述第一工作台下方,以收集加工所产生的液体、粉尘、颗粒物和切削物;所述净水单元设置在所述除尘单元的下方,以过滤加工所产生的液体,并收集加工所产生的粉尘、颗粒物和切削物。
6.相较于现有技术,本发明通过将干磨和水磨工艺集成在一密闭空间内,并根据两种工艺的工况,通过设置除尘单元和净水单元,以收集和沉淀粉尘、颗粒物、切削物和净化加工产生的液体,能满足不同产品的加工需求,同时避免固体物和废液损害工件,减少了对外部环境的污染以及对操作人员身体健康的危害。
7.进一步地,所述除尘单元包括收集漏斗和吸尘装置,所述收集漏斗设置在所述第一工作台的下方;所述吸尘装置通过管道与所述收集漏斗连通
8.进一步地,所述除尘单元还包括对流装置,所述对流装置设置在所述密封舱的顶板上并正对所述第一工作台,所述对流装置上设有过滤棉芯。
9.进一步地,所述净水单元包括依序连通的过滤装置、过滤水槽、压力水泵和净水装置,所述过滤装置与所述收集漏斗连通,所述净水装置与所述第一喷水管连通。
10.进一步地,所述第一工作台为双工位旋转台,所述密封舱的侧壁上设有工作窗,所述第一工作台设置在所述工作窗的位置,使一工位位于所述密封舱外侧,另一工位位于所述密封舱内侧,所述第一工作台的其中一工位上设有用于固定工件的滑槽板。
11.进一步地,所述第一工作台包括转盘,设置在所述转盘底部的旋转单元,设置在所述转盘顶部的密封板;所述转盘分为两工位,所述滑槽板设置在所述转盘的其中一工位上;所述旋转单元包括旋转驱动电机和减速机;所述旋转驱动电机具有输出轴;所述减速机具有一输入端和一旋转端;所述旋转驱动电机的输出轴与所述减速机的输入端固定连接;所述减速机的旋转端与所述转盘固定连接;所述双工位旋转台旋转至一工位完全进入所述密封舱内时,所述密封板封堵所述工作窗。
12.进一步地,所述旋转单元还包括气电滑环,所述气电滑环的上部与所述转盘固定连接。
13.进一步地,所述干水磨一体工作站还包括设置在所述密封舱内的第二工作台,所述第二工作台位于所述除尘单元的上方,所述第二工作台的顶部设置有第二喷水管,所述第二工作台上设有第二通孔;所述机器人将安装在其自由端的工件移向安装在所述第二工作台上的加工治具,以对所述工件进行打磨加工。
14.进一步地,所述干水磨一体工作站还包括恒力打磨装置和自动换砂装置,所述恒力打磨装置和所述自动换砂装置均设置在所述第二工作台的顶部,并均位于所述收集漏斗的上方。
15.本发明还提供一种基于上述干水磨一体工作站的使用方法,包括以下步骤:
16.s101:将工件固定在所述第一工作台的滑槽板上,并将带有砂纸的所述加工治具安装在所述机器人的自由端;
17.s102:启动所述第一工作台旋转,将所述工件送入所述密封舱内;
18.s103:判断对所述工件需要进行水磨还是干磨;
19.如果进行水磨,启动所述机器人对所述第一工作台上的所述工件进行加工;同时启动所述压力水泵,将所述过滤水槽内的水体输送至所述净水装置,水体经过所述净水装置的净化,通过所述第一喷水管喷向所述工件;
20.如果进行干磨,启动所述机器人对所述第一工作台上的工件进行加工,直至打磨结束;同时,启动所述对流装置,将外部环境中的空气通入所述密封舱内,垂直吹向所述第一工作台上的工件,带走粉尘、颗粒物和切削物,并汇集至所述收集漏斗;同时启动所述吸尘装置,吸附落入所述收集漏斗中粒径较小的颗粒物和粉尘,并进行净化处理,然后所述吸尘装置将净化好的气体释放到外部环境中;
21.或者,包括以下步骤:
22.s201:将带有砂纸的所述加工治具固定在所述第二工作台上,并将所述工件安装在所述机器人的自由端;
23.s202:判断对所述工件进行水磨还是干磨,并判断所述水磨或所述干磨过程是否需要恒力打磨;
24.如果进行水磨,启动所述机器人将所述工件移向对所述第二工作台上的所述加工治具,对所述工件进行加工;同时启动所述压力水泵,将所述过滤水槽内的水体输送至所述净水装置,水体经过所述净水装置的净化,通过所述第二喷水管喷向所述工件;
25.如果进行干磨,启动所述机器人将所述工件移向对所述第二工作台上的所述加工治具,对所述工件进行加工;同时启动所述对流装置,将外部环境中的空气通入所述密封舱内,带走所述第二工作台上加工产生的粉尘、颗粒物和切削物;同时,启动所述吸尘装置,吸
附落入所述收集漏斗中的粒径较小的颗粒物和粉尘,并进行净化处理,然后所述吸尘装置将净化好的气体释放到外部环境中;
26.如果所述水磨或所述干磨过程需要恒力打磨,则所述机器人将所述工件移向所述恒力打磨装置进行加工。
27.为了更好地理解和实施,下面结合附图详细说明本发明。
附图说明
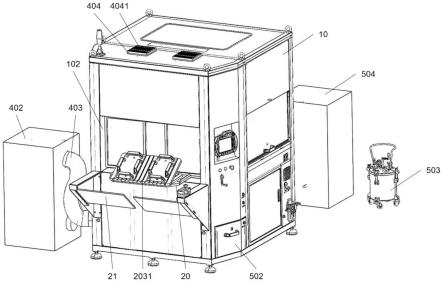
28.图1为本发明干水磨一体工作站的外部结构示意图;
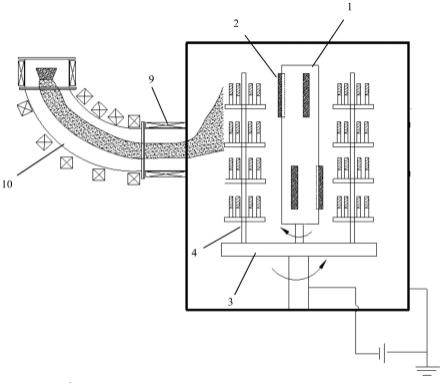
29.图2为本发明干水磨一体工作站的内部结构示意图;
30.图3为本发明干水磨一体工作站中第一工作台为双工位旋转台的外部结构示意图;
31.图4为本发明干水磨一体工作站中第一工作台为双工位旋转台的结构示意图;
32.图5为本发明干水磨一体工作站中第一工作台为双工位旋转台的爆炸图;
33.图6为本发明干水磨一体工作站优化方案的内部结构示意图;
34.图7为本发明干水磨一体工作站优化方案的内部结构俯视图;
35.图8为本发明干水磨一体工作站的内部结构的局部放大图;
36.附图标记:1-工件、10-密封舱、102-工作窗、20-第一工作台、201-第一喷水管、202-第一通孔、203-转盘、2031-滑槽板、2031a-滑槽、2031b-固定件、204-旋转单元、2041-旋转驱动电机、2042-减速机、2043-气电滑环、205-密封板、206-气电滑环的支撑板、21-安全光栅、30-机器人、301-加工治具、40-除尘单元、401-收集漏斗、402-吸尘装置、403-管道、404-对流装置、4041-棉芯、501-过滤装置、502-过滤水槽、503-压力水泵、504-净水装置、60-第二工作台、601-第二喷水管、602-第二通孔、70-恒力打磨装置、80-自动换砂装置。
具体实施方式
37.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
38.本发明提供一种干水磨一体工作站,通过将干磨和水磨工艺集成在同一密闭的空间内,能有效满足对不同工件的加工要求。
39.请参阅图1和图2,本实施方式的干水磨一体工作站包密封舱10,设置在密封舱10内部的第一工作台20、机器人30、除尘单元40和净水单元。
40.具体地,密封舱10为长方体,第一工作台20设置在密封舱10的侧壁上,在第一工作台20的上方设有第一喷水管201,第一工作台20上设有第一通孔202,第一通孔202呈矩阵排列。机器人30固定在密封舱10的底板上,其自由端可安装加工治具301,对固定在第一工作台20上的工件1进行打磨加工。
41.除尘单元40包括收集漏斗401和吸尘装置402。收集漏斗401设置在第一工作台20的下方,用以收集和过滤在第一工作台20加工工件产生的粉尘、颗粒物、切削物以及液体。
吸尘装置402通过管道403与收集漏斗401连通,用于吸取沉入收集漏斗401的粉尘、颗粒物和切削物。在这里,吸尘装置402具体为脉冲大流量除尘机;管道403为波纹管,也可以选用普通管道,只要能实现收集漏斗401和吸尘装置402连通即可。优选地,除尘单元40还包括两对流装置404,用于将密封舱10外部的空气通入密封舱10内。两对流装置404并列设置在密封舱10的顶板,其部分位于密封舱10内部,部分位于密封舱10外部,两对流装置404位于密封舱10内部的部分正对第一工作台20,以对第一工作台20通入垂直向下的气流。两对流装置404位于密封舱10外部的顶部设置有过滤棉芯4051,以过滤外部环境的空气,使通入密封舱10的空气不会夹杂灰尘等杂质;在这里,对流装置404具体为对流风扇。
42.净水单元包括依序连通的过滤装置501、过滤水槽502、压力水泵503和净水装置504;过滤装置501与收集漏斗401连通,净水装置504与第一工作台20上的第一喷水管201连通,过滤装置501具体为多栅格过滤抽屉,其具有至少一过滤网或过滤筛板。
43.打磨工件前,将待加工的工件1安装在在第一工作台20上,并将加工治具301安装在机器人30的自由端上。然后根据产品加工工艺的需求选择对工件进行干磨或水磨。
44.当工件进行干磨时,在启动机器人30对第一工作台20上的工件干磨加工,同时启动对流装置404和吸尘装置402,对流装置404从第一工作台20的正上方吹向第一工作台20上的工件1,产生垂直向下的气流,带走干磨加工时产生的粉尘、颗粒物和切削物,然后通过第一工作台20的第一通孔202,汇集在收集漏斗401,并从收集漏斗401的出口排出。此时,粒径较大的颗粒物和大块的切削物从收集漏斗401的出口沉入过滤装置501中,并在过滤装置501中被截留,再通过人工将过滤装置501中截留的固体物取出清理;而粒径较小的颗粒物和粉尘在吸尘装置402的强大吸力作用下,通过管道403收集至吸尘装置402内,避免粉尘和颗粒物弥漫在密封舱10内,进而附着在工件1上。当外部扬尘颗粒物大于打磨的颗粒物时,机器人30打磨会对工件1二次污染问题,使工件1表面出现划痕,影响工件生产质量。吸尘装置402内对吸入的粒径较小的颗粒物和粉尘处理后,再将净化的空气排放至外部环境。
45.当工件进行水磨时,启动压力水泵503,压力水泵503将水输入净水装置504,经过净水装置504净化后的水通过第一喷水管201喷向第一工作台20的工件1,同时机器人30对工件1进行水磨加工。在向工件1喷水的过程中,水会带走工件1的表面的颗粒物和切削物,然后通过第一工作台20上的第一通孔202,汇集收集漏斗401,并从收集漏斗401的出口排出。粒径较大的颗粒物和大块的切削物从收集漏斗401的出口沉入过滤装置501中,并在过滤装置501中被截留,而夹杂着小粒径颗粒物或粉尘的产水则汇集至过滤水槽502,然后压力水泵503将过滤水槽502中收集的产水输送至净水装置504进行净化,净化后的水体成为工件1水磨的水源,如此循环流动,使水资源可以循环利用,且减少环境污染。
46.进一步地,为便于人工从密封舱10外部将工件送入密封舱10内,减少进出密封舱10的次数,上述的第一工作台20可为双工位旋转台。具体地,请参阅图3,密封舱10上设有工作窗102,第一工作台20设置在第一工作窗102的位置,使第一工作台20的其中一工位位于密封舱10外侧,另一工位位于密封舱10内侧。具体地,请参阅图4和图5,第一工作台包括转盘203、旋转单元204和密封板205。转盘203对半分为两个工位,在转盘203的其中一工位上设置有用于固定工件1的滑槽板2031。旋转单元204设置在转盘203的底部,并位于转盘203的中心轴位置,具体包括旋转驱动电机2041和减速机2042,减速机2042具体为中空减速机。旋转驱动电机2041具有输出轴,减速机2042具有输入端和旋转端,旋转驱动电机2041的输
出轴与减速机2042的输入端固定连接,减速机2042的旋转端为旋转盘,减速机2042的旋转端与转盘203的底部固定连接。旋转驱动电机2041通过驱动减速机2042使转盘203绕其中心轴线旋转,并通过减速机2042控制旋转的速度以及精度。然而,由于转盘203来回旋转容易对电控器件的电线造成扭伤,同时来转盘203回旋转也会产生二次定位问题,为了避免转盘203多次来回旋转造成线路扭伤,旋转单元204还包括气电滑环2403,具体地,气电滑环2403的上部与转盘203固定连接,其下部固定在支撑板206上。
47.第一工作台20的其中一工位上设有用于固定工件的滑槽板2031。密封板205垂直设置两工位的分界线上,当转盘203旋转至一工位完全进入密封舱10内部,而另一工位位于密封舱10外侧时,密封板205完全封堵工作窗102。滑槽板2031具体为长方形板,其顶部均匀分布有多条相互平行并延伸至两边缘的滑槽2031a,且滑槽2031a底部的面积大于其顶部的面积。使用时,通过如螺丝或螺栓,以及与之适配的螺母,将工件固定可滑动地连接于在滑槽2031a内,以便于调整工件的位置,使加工过程更加灵活,而滑槽板2031的顶部则设有凸起的固定件2031b,用于限制工件1的位置。这里的固定件2301可以为圆鞘和可以为菱鞘。优选地,滑槽板2031底部设有两楔形的支撑板,以使滑槽板2031朝向机器人30方向呈一定角度倾斜,便于机器人30对滑槽板2031上的工件进行加工。此外,为防止第一工作台20旋转时将操作人员卷入,可在第一工作台20位于密封舱10外侧部分的四周设置安全光栅21,以提高作业的安全性。
48.作为对上述技术方案的进一步优化,本发明的干水磨一体工作站还包括设置在密封舱10内部的第二工作台60,用于固定加工治具301。具体地,请参阅图6和图7,第二工作台60位于在收集漏斗401的上方,第二工作台60的顶部也设置有第二喷水管601,第二喷水管601与净水装置504连通;第二工作台60上也设有第二通孔602。
49.打磨加工工件前,将加工治具301固定在第二工作台60上,并将待加工的工件1安装在机器人30的自由端。
50.当进行水磨时,启动压力水泵503,压力水泵503将水输入净水装置504,经过净水装置504净化后的,机器人30将工件移至加工治具301,对工件进行加工。在向加工治具301喷水的过程中,水磨产生的颗粒物和切削物会随着水,通过第二工作台60上的通孔602流向收集漏斗401,由于流向收集漏斗401后的处理过程在前文已在叙述,故在此不再重复说明。而进行干磨时,加工产生的粉尘、颗粒物和切削物通过第二工作台60上的通孔602汇集至收集漏斗401,粒径比较小的颗粒物和粉尘在吸尘装置402的作用下,被吸入吸尘装置402并收集;而粒径较大的颗粒物和大块的切削物从收集漏斗401的出口沉入过滤装置501中,并在过滤装置501中被截留。为使粉尘、颗粒物和切削物更快地汇集至收集漏斗401内,而避免其弥漫于密封舱10内,在第二工作台60的正上方也设有对流装置404,对流装置404对第二工作台60产生垂直向下的气流,将工件30和加工治具301上的粉尘、颗粒物和切削物带至收集漏斗401内。
51.进一步地,本发明的干水磨一体工作站还包括恒力打磨装置70和自动换砂装置80。请参阅图8,恒力打磨装置70设置在第二工作台60的顶部,并位于收集漏斗401的上方。当需要对工件进行恒力打磨时,机器人30的自由端将工件移向恒力打磨装置70,对工件施加恒力加工。在此加工过程中产生的粉尘、颗粒物和切削物将落到收集漏斗401内收集处理。自动换砂装置80也设置在第二工作台60的顶部,并位于收集漏斗401的上方。在进行打
磨加工前,人工将所需砂纸放置在自动换砂装置80内。当需要更换机器人30自由端上加工治具301的砂纸时,使用自动换砂装置80将砂纸撕下,撕下的砂纸掉入收集漏斗401内,再落入过滤装置501后进行除废作业。由于自动换砂装置8为现有技术,因此不再在此对其结构和工作原理进行赘述。
52.通过在密封舱10内设置第二工作台60作为固定加工治具301的平台,可便于在其上恒力打磨装置70和自动换砂装置80,以满足不同加工的需求,灵活性高,且使设备的机构更加紧凑,布局更加合理。
53.为实现自动化的打磨,本发明还包括一控制装置(图未示),控制装置(图未示)分别与机器人30、第一工作台20的旋转单元204、对流装置404、吸尘装置402、压力水泵503和恒力打磨装置70电连接,以控制机器人30、旋转单元204、对流装置404、吸尘装置402、压力水泵503和恒力打磨装置70的启停。
54.除此之外,本发明还提供一种基于上述干水磨一体工作站结构的使用方法,包括以下步骤:
55.s101:将工件1固定在第一工作台20的滑槽板2031上,并将带有砂纸的加工治具301安装在机器人30的自由端;
56.s102:启动第一工作台20旋转,将工件1送入密封舱10内;
57.s103:判断对工件1进行水磨还是干磨;
58.如果进行水磨,启动机器人30对第一工作台20上的工件1进行加工;同时启动压力水泵503,将过滤水槽502内的水体输送至净水装置504,水体经过净水装置504的净化,通过第一喷水管201喷向工件1;
59.如果进行干磨,启动机器人30对第一工作台20上的工件1进行加工;同时,启动对流装置404,将外部环境中的空气通入密封舱10内,垂直吹向第一工作台20上的工件,带走粉尘、颗粒物和切削物,并汇集至收集漏斗401;同时启动吸尘装置402,吸附落入收集漏斗401中粒径较小的颗粒物和粉尘,并进行净化处理,然后吸尘装置402将净化好的气体释放到外部环境中;
60.s104:完成打磨后,启动第一工作台20将工件1送出密封舱10,或进入密封舱10内将工件1取出。
61.或者,包括以下步骤:
62.s201:将带有砂纸的加工治具301固定在第二工作台60上,并将工件1安装在机器人30的自由端;
63.s202:判断对工件1进行水磨还是干磨,并判断所述水磨或所述水磨过程是否需要恒力打磨;
64.如果进行水磨,启动机器人30将工件1移向对第二工作台60上的加工治具301,对工件进行加工;同时启动压力水泵503,将过滤水槽502内的水体输送至净水装置504,水体经过净水装置504的净化,通过第二喷水管601喷向工件;
65.如果进行干磨,启动机器人30将工件1移向对第二工作台60上的加工治具301,对工件进行加工;同时启动对流装置404,将外部环境中的空气通入密封舱10内,带走粉尘、颗粒物和切削物,并汇集至收集漏斗401;同时,启动吸尘装置402,吸附落入收集漏斗401中的粒径较小的颗粒物和粉尘,并进行净化处理,然后吸尘装置402将净化好的气体释放到外部
环境中;
66.如果判断所述水磨或所述水磨过程需要恒力打磨,则机器人30将工件1移向恒力打磨装置80进行加工。
67.s203:完成打磨后,将工件1取出。
68.进一步地,上述步骤s101或步骤s201还包括判断自动换砂装置80内的砂纸是否足够;如果不够,将所需砂纸放置在自动换砂装置80内。
69.相较于现有技术,本发明通过将干磨和水磨工艺集成一在以密闭空间内,并根据两种工艺的工况,通过设置除尘单元和净水单元,以收集和沉淀粉尘、颗粒物、切削物和加工产生的液体,避免固体物和废液损害工件,减少了对操作人员的身体危害。此外,通过设置两个工作台,以满足不同工件加工的需求,灵活性高,且使设备的机构更加紧凑,布局更加合理。
70.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,则本发明也意图包含这些改动和变形。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。