1.本发明属于机械臂技术领域,具体涉及一种物料取拿用多功能的机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。在现代化的机械工业生产中,各种自动化机械大量替代工人,去完成恶劣环境下的工作,同时其高速的工作效率也是工人无法比拟的,同样自动化机械也不需要休息,其可以24小时不停的工作。
3.然而,在使用的过程中,机械手还存在以下几点技术问题,制约着工业化的高效生产:(1)目前的机械手,主要针对物体短距离的转移,例如0-3米之内,但是对于大范围内物体的转移,现有的机械手装置却没有办法实现,例如5米以上乃至于十数米以外的物体,常常采用搬运叉车或者横梁起吊的方式来实现物体的移动,但是并不能用于安装或者拆卸等操作;(2)现有的机械臂更多的是针对一定角度范围内的物体,进行相关的作,当需要针对回转体360
°
的操作时,便不再适用;(3)目前的机械手臂多进行平移或者旋转运动,然而,在实际的运用时,常常会出于安全、节省空间等考虑,需要使得机械臂的运动呈大范围的圆弧轨迹,然而由于编程或者结构设计的因素,常规的机械手臂无法应对循环圆弧式的操作。
技术实现要素:
4.本发明的目的在于提供一种物料取拿用多功能的机械手,解决了如何使得机械手实现大范围工作的技术问题,可以用于360
°
回转体的操作,其弧形运动的轨迹也使得本方案具有更广泛的适应性。
5.一种物料取拿用多功能的机械手,包括弧形轨道结构、设置在所述弧形轨道结构内部的固定车、竖直设置在所述固定车上的丝杠传动机构、与所述丝杠传动机构连接的转动块、一端与所述转动块铰接的移动杆,所述移动杆的另一端通过钢丝绳或者电动推杆与所述移动车连接,所述移动车设置在所述弧形轨道结构上;所述移动杆上设置有滑动结构一和滑动结构二,所述滑动结构一和所述滑动结构二之间设置有角度调节结构,所述角度调节结构上设置有工业机器人。
6.所述滑动结构一包括移动块一、穿过所述移动块一上的齿轮轴一、设置在所述齿轮轴一上的齿轮一、与所述齿轮轴一连接的电机三,所述电机三设置在所述移动块一上,所述齿轮一与设置在所述移动杆上的齿带一啮合连接;所述移动块一的底端与所述角度调节结构连接。
7.所述滑动结构二包括移动块二、穿过所述移动块二上的齿轮轴二、设置在所述齿
轮轴二上的齿轮二、与所述齿轮轴二连接的电机四,所述电机四设置在所述移动块二上,所述齿轮二与设置在所述移动杆上的齿带一啮合连接;所述移动块二的顶端与所述角度调节结构连接。
8.所述角度调节结构包括调节杆、与所述调节杆一端连接的气缸、一端与所述调节杆另一端连接的拉绳、与所述气缸底端连接的定位块、可移动的设置在所述调节杆上的移动块三,所述移动块三通过转动结构与所述工业机器人连接;所述移动块三上设置有齿轮轴三,所述齿轮轴三上设置有齿轮三,所述齿轮三与设置在所述调节杆上的齿带二啮合连接,所述齿轮轴三与电机二啮合连接,所述电机二设置在所述移动块三上;所述定位块与固定轴铰接,所述固定轴垂直设置在所述移动块一的底端,所述拉绳的另一端与驱动辊连接,所述驱动辊可转动的设置在所述移动块二的顶端,所述驱动辊与电机五连接。
9.所述转动结构包括同轴设置在所述齿轮轴三上的锥齿轮二、与所述锥齿轮二啮合连接的锥齿轮一、穿过所述锥齿轮一的转动轴、设置在所述转动轴端部的转板,所述转板的底面边沿固定设置有所述工业机器人。
10.所述弧形轨道结构包括圆弧形的轨道一和轨道二,所述轨道一和所述轨道二的底端分别设置有支腿二、支腿一,所述支腿一、所述支腿二的底端均设置有移动轮;所述移动车设置在所述轨道一和所述轨道二上。
11.所述移动车上设置有转辊,所述转辊的两端分别通过支撑座铰接在所述移动车上,所述转辊的一端与电机一连接;所述转辊与所述钢丝绳连接,或者所述移动车的底端设置有所述电动推杆。
12.所述丝杠传动机构包括竖直设置的丝杠和导柱、设置在所述丝杠顶端的丝杠电机、设置在所述丝杠和导柱上的滑块,所述转动块可水平转动的铰接在所述滑块上;所述丝杠或者所述导柱的两端分别设置在底座、顶座上。
13.所述定位块上设置有通孔,所述移动块二的底端侧部垂直设置有嵌入柱,所述嵌入柱可分离式的插入在所述通孔内;所述嵌入柱的外端设置有豁口,所述拉绳穿设所述豁口中。
14.本发明的有益效果在于如下几点:(1)设置有弧形轨道结构、滑动结构一和滑动结构二,使得工业机器人能够在一个弧形面的范围内,对该范围内的设备或者零件进行安装、拆卸、转移等操作,延伸了工业机器人的操作范围;(2)设置有定位块和拉绳,通过电机五的作用,使得调节杆的倾斜角度实现了相应的调节,由于转板上设置有工业机器人,因此,工业机器人的工作角度和位置可以根据实际的情形,进行相应的调整,此时转板可以处于竖直状态,也可以处于水平状态;(3)在移动块三上设置有转动结构,当移动块三在调节杆上移动时,同时带动锥齿轮二和锥齿轮一做转动运动,进而使得转板旋转,即在移动块三直线运动的同时,也实现了工业机器人工作位置的调节,使得工业机器人能够针对回转体的各个方向都能进行相应的生产操作,具有多功能的技术效果;(4)在定位块上设置有通孔,在移动块二的底端侧部垂直设置有嵌入柱,因此,当
调节杆处于竖直状态时,嵌入柱插入在通孔内,有助于实现对调节杆的定位,避免其晃动;同时,在嵌入柱的外端设置有豁口,拉绳穿过该豁口,有助于增强对拉绳的张紧和限位效果。
附图说明
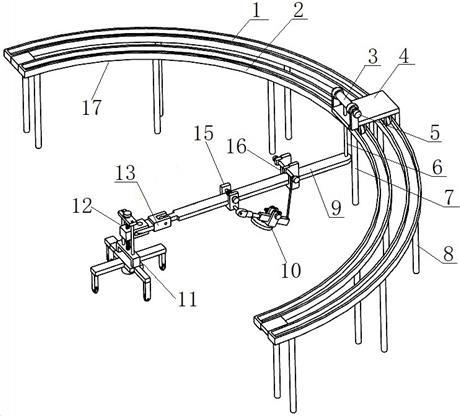
15.图1为本发明实施例1中机械手的结构示意图。
16.图2为本发明实施例1中移动升降机构的结构示意图。
17.图3为本发明实施例1中滑动结构一和滑动结构二的结构示意图一。
18.图4为本发明实施例1中滑动结构一和滑动结构二的结构示意图二。
19.图5为本发明实施例1中移动块二和定位块的连接结构图。
20.其中,附图标记为:1、轨道一;2、轨道二;3、转辊;4、移动车;5、电机一;6、钢丝绳;7、支腿一;8、支腿二;9、移动杆;10、角度调节结构;101、拉绳;102、调节杆;103、电机二;104、移动块三;105、转板;106、气缸;107、转动轴;108、锥齿轮一;109、锥齿轮二;110、齿轮三;11、固定车;111、移动腿;112、横杆;113、配重块;12、丝杠传动机构;121、底座;122、导柱;123、丝杠;124、顶座;125、丝杠电机;126、滑块;13、转动块;15、滑动结构一;151、移动块一;152、齿轮一;153、电机三;154、固定轴;155、定位块;16、滑动结构二;161、移动块二;162、电机四;163、齿轮二;164、驱动辊;165、电机五;166、嵌入柱;167、豁口;17、弧形轨道结构;18、转动结构。
具体实施方式
21.为了能更加清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
22.实施例1参见图1-图5,一种物料取拿用多功能的机械手,包括弧形轨道结构17、设置在弧形轨道结构17内部的固定车11、竖直设置在固定车11上的丝杠传动机构12、与丝杠传动机构12连接的转动块13、一端与转动块13铰接的移动杆9,移动杆9的另一端通过钢丝绳6与移动车4连接,移动车4设置在弧形轨道结构17上;移动杆9上设置有滑动结构一15和滑动结构二16,滑动结构一15和滑动结构二16之间设置有角度调节结构10,角度调节结构10上设置有工业机器人。
23.更优的,钢丝绳6可以具有多个,以便增加连接的稳定性。
24.工业机器人的固定方式可以采用螺栓固定,也可以根据实际的情形,采用其他的方式进行固定,在此不再详述。
25.更优地,在固定车11的外侧设置有横杆112,在横杆112的底端设置有移动腿111,在固定车11的中心底端设置有配重块113。
26.滑动结构一15包括移动块一151、穿过移动块一151上的齿轮轴一、设置在齿轮轴一上的齿轮一152、与齿轮轴一连接的电机三153,电机三153设置在移动块一151上,齿轮一152与设置在移动杆9上的齿带一啮合连接;移动块一151的底端与角度调节结构10连接。
27.滑动结构二16包括移动块二161、穿过移动块二161上的齿轮轴二、设置在齿轮轴
二上的齿轮二163、与齿轮轴二连接的电机四162,电机四162设置在移动块二161上,齿轮二163与设置在移动杆9上的齿带一啮合连接;移动块二161的顶端与角度调节结构10连接。
28.角度调节结构10包括调节杆102、与调节杆102一端连接的气缸106、一端与调节杆102另一端连接的拉绳101、与气缸106底端连接的定位块155、可移动的设置在调节杆102上的移动块三104,移动块三104通过转动结构18与工业机器人连接;移动块三104上设置有齿轮轴三,齿轮轴三上设置有齿轮三110,齿轮三110与设置在调节杆102上的齿带二啮合连接,齿轮轴三与电机二103啮合连接,电机二103设置在移动块三104上;定位块155与固定轴154铰接,固定轴154垂直设置在移动块一151的底端,拉绳101的另一端与驱动辊164连接,驱动辊164可转动的设置在移动块二161的顶端,驱动辊164与电机五165连接。
29.转动结构18包括同轴设置在齿轮轴三上的锥齿轮二109、与锥齿轮二109啮合连接的锥齿轮一108、穿过锥齿轮一108的转动轴107、设置在转动轴107端部的转板105,转板105的底面边沿固定设置有工业机器人。
30.弧形轨道结构17包括圆弧形的轨道一1和轨道二2,轨道一1和轨道二2的底端分别设置有支腿二8、支腿一7,支腿一7、支腿二8的底端均设置有移动轮;移动车4设置在轨道一1和轨道二2上。
31.移动车4上设置有转辊3,转辊3的两端分别通过支撑座铰接在移动车4上,转辊3的一端与电机一5连接;转辊3与钢丝绳6连接。
32.丝杠传动机构12包括竖直设置的丝杠123和导柱122、设置在丝杠123顶端的丝杠电机125、设置在丝杠123和导柱122上的滑块126,转动块13可水平转动的铰接在滑块126上;丝杠123或者导柱122的两端分别设置在底座121、顶座124上。
33.定位块155上设置有通孔,移动块二161的底端侧部垂直设置有嵌入柱166,嵌入柱166可分离式的插入在通孔内;嵌入柱166的外端设置有豁口167,拉绳101穿设豁口167中。
34.本发明的具体工作过程:设置有弧形轨道结构17,滑块126与转动块13的铰接点位于轨道一1和轨道二2的圆弧中心位置,此时移动车4可以顺利沿着轨道一1和轨道二2往复移动,从而带动移动杆9做扇形摆动运动,固定车11的底端设置有万向轮,但是工作时,可以将固定车11定位在特定的位置,避免其移动,具体的固定方式多样,例如采用螺栓、绳绑等,可以根据实际的情形而定;当需要变换工作位置时,可以同时移动固定车11和弧形轨道结构17,固定车11底端的万向轮、支腿一7和支腿二8底端的移动轮,均能够使得整体的装置根据实际的情形进行相应的移动;设置有滑动结构一15和滑动结构二16,在齿轮一152、齿轮二163和齿带的啮合作用下,使得移动块一151和移动块二161能够往复的运动,可以根据待操作设备的实际位置进行相应调节,使得工业机器人能够在一个弧形面的范围内,对该范围内的设备或者零件进行安装、拆卸、转移等操作,延伸了工业机器人的操作范围;设置有定位块155和拉绳101,通过电机五165的作用,使得调节杆102的倾斜角度
实现了相应的调节,由于转板105上设置有工业机器人,因此,工业机器人的工作角度和位置可以根据实际的情形,进行相应的调整,此时转板105可以处于竖直状态,也可以处于水平状态;由于移动块三104的运动,间接带动转板105的转动,从而使得工业机器人可以位于待操作设备的东、南、西、北四个方向进行工作,可以适用于360
°
回转体的零部件安装、拆卸、焊接等操作;在定位块155上设置有通孔,在移动块二161的底端侧部垂直设置有嵌入柱166,因此,当调节杆102处于竖直状态时,嵌入柱166插入在通孔内,有助于实现对调节杆102的定位,避免其晃动;同时,在嵌入柱166的外端设置有豁口167,拉绳101穿过该豁口167,有助于增强对拉绳101的张紧和限位效果。
35.实施例2移动杆9的另一端还可以通过电动推杆与移动车4连接,具体来说,使得电动推杆的底端与移动车4的底端连接,电动推杆的伸缩端与移动杆9铰接,此时采用电动推杆,具有较强的连接稳定性,避免较大的晃动。
36.本发明未经描述的技术特征可以通过或采用现有技术实现,在此不再赘述,当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。