1.本发明涉及马铃薯切块领域,尤其涉及一种马铃薯种薯智能切块机。
背景技术:
2.马铃薯是一种多年生的茄科类草本植物,是生活中非常常见蔬菜之一,也被称为山药、土豆。马铃薯不仅营养丰富而且对环境的适应力强、产量很高与小麦、水稻、玉米、高粱并列世界五大作物。我国马铃薯产量保持稳定增长态势,已成为世界马铃薯总产量最大的国家。主要产区为甘肃省定西市、宁夏固原市、中国西南部、内蒙古和中国东北部,其中甘肃省定西市是中国马铃薯种植面积最大的县,为全国各地提供了大量优质马铃薯,被称为“中国马铃薯之乡”。
3.马铃薯是由块茎繁殖的作物,在生产和生活中,为了增加种薯与外界的接触面积,通常会对种薯进行切割,以促进种薯与种薯内部的氧交换,从而使种薯提前打破休眠并发芽。切割后,将马铃薯种子块统一收集并消毒,以降低植物发病率并促进植物茎的生长。当前基于机器视觉对马铃薯的研究,多是根据图像对种薯几何特征进行测量,品质进行分类以及对于种薯常见病害进行识别,对芽眼的研究相对较少,这样不仅会导致种薯的浪费,而且有些薯块会存在没有芽眼的现象,这就不能够保证种薯能够成功出芽,出苗率大大降低。要根据芽眼完成对种薯的智能切块,基于机器视觉的芽眼识别是先决条件之一。
4.目前国内市场还没有成型的产品,现阶段的研究主要集中在机械切割部分,对于马铃薯切块的芽眼识别和智能切块领域的研究目前还处于初级阶段,但随着社会的发展,已经得到了社会各界得重视与研究。
5.国外在马铃薯种薯自动切块领域的研究开展相对较早,其中美国早在20实世纪60年代就开始了相关研究,设计制造了多款机型,在不断改进中积累了丰富的经验,现已有多种成型产品投放市场。
6.目前,我国马铃薯切块仍以人工为主,一方面需要大量的人工进行制种,存在作业效率低、作业效果不佳、生产成本高、劳动强度大等问题,另一方面需要对切块后的薯块进行消毒处理,因为通常切开的马铃薯会产生霉变等现象,之前避免霉变的方法是将薯快浸泡在消毒液中,然后捞出,此种方法会造成消毒液的大量消耗和浪费,因此随着现代农业发展需要,采用智能切块可以提高切块效率、保证种薯切块质量、减少人工的投入、降低制种成本、促进环境保护,种薯智能切块机的研制对促进马铃薯种植的全程机械化有很大的意义。
技术实现要素:
7.本发明的目的是提供可以根据马铃薯芽眼完成对其智能切块的马铃薯切块机,提高了切块效率、保证了种薯切块质量、同时减少了人工的投入、降低了制种成本以及促进马铃薯种植的全程机械化的马铃薯种薯切块机。
8.为了实现上述目的,本发明采用了如下技术方案:
9.一款马铃薯种薯智能切块机,包括料斗,其特征在于,所述料斗固定安装在料斗支架上,所述料斗底部固定连接有进料板,所述料斗支架左侧固定连接有棘轮,所述料斗支架右侧固定连接有种薯琨轮,所述种薯琨轮右侧固定有传送带a,所述传送带a固定安装在支架a 上,所述支架a顶部固定安装有芽眼识别装置,所述芽眼识别装置右侧固定有切割装置,且所述切割装置固定安装在支架a顶部,所述支架a右侧固定有振动器,所述振动器顶部固定安装在振动板上,所述振动板固定安装在筛选支架上,所述筛选支架右侧固定有传送带b,所述传送带b固定安装在支架b上,所述支架b顶部固定安装有拨动装置,所述拨动装置左侧固定有分类识别装置,右侧固定有消毒装置且所述分类识别装置、所述消毒装置固定安装在支架b顶部,所述支架b右侧固定连接有收集箱。
10.所述料斗顶部设置有储粮仓,所述料斗底部设置有出粮口。
11.所述棘轮由步进电机带动顺时针旋转,每旋转一定的角度,棘轮推动进料板后端抬高一下,使种薯经槽口滑动至种薯琨轮上,此后进料板复位。
12.所述种薯辊轮设计为圆台型,尖端向里设置,辊轮机构与水平方向夹角设为30
°
。根据辊轮之间的空隙,可以筛选出体积较小,不需要切块的种薯,并使得满足切块大小的种薯经滚动后可以按重心平稳放置于传送带a中间。
13.所述芽眼检测识别装置包括图像采集装置和图像分析装置,图像采集装置和图像分析装置均固定在横板上,横板通过支架与机架固定,图像分析装置接收来自于图像采集装置的图像信息,并进行图像处理,以进行切刀选择,保证切割完成后的薯块至少保留一个芽眼。
14.所述切割装置将刀具分为3组并根据检测识别装置传来的切割信号选择合适的刀具,对马铃薯种薯进行切块,分别将其切成两块、三块和四块。
15.所述振动装置通过振动使将带有芽眼的一面漏出供后面的分类识别装置进行识别。
16.所述分类识别装置固定在支架b横板上,横板通过支架与机架固定,当识别装置识别出薯种的生命力较低时,拨动装置将把薯种拨到拨片正下方前侧并且落入收集器中,通过此种方式实现对薯种的分类。
17.所述消毒装置设置在支架b的横梁上,当薯块由传送带输送至消毒装置时,雾化消毒液喷洒在薯块表面完成消毒作业。
18.所述收集箱的数量为2个,所述2个收集箱分别位于支架b右侧以及拨动装置正下方前侧,分别承接从传送带b上正常落下的薯种以及被拨动装置拨动下来的两种不同生命力的薯种块。为便于提取,在收集箱两侧分别设计提手。
19.本发明至少具备以下有益效果:
20.1、该马铃薯种薯智能切块机,通过接收来自于图像采集装置的图像信息,并进行图像处理,包括芽眼检测、种薯大小检测、切刀选择以及切刀旋转角度计算,最后传送至嵌入式单片机控制切割装置执行以上操作,保证了切割完成后的薯块至少保留一个芽眼,提高了切块效率、保证了种薯切块质量。
21.2、当识别装置识别出薯种的生命力较低时,拨动装置将把种薯拨到拨片正下方前侧并且落入收集器中,减少了人工的投入、降低了制种成本。
22.3、当薯块由传送带输送至消毒装置时,控制器启动控制电磁阀导通,抽取药液箱
内的消毒液由多个喷头雾化后喷洒在薯块表面,完成消毒作业,促进了环境保护。
附图说明
23.为了更清楚地说明本发明实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
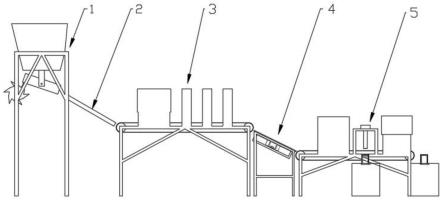
24.图1为本发明结构示意图;
25.图2为本发明种薯进料装置结构示意图;
26.图3为本发明切割装置结构示意图;
27.图4为本发明分类机构结构示意图;
28.图5为本发明薯块收集装置结构示意图;
29.图6为本发明进粮斗结构三维图;
30.图7为本发明种薯琨轮结构俯视图;
31.图8为本发明切刀机构示意图;
32.图9为本发明拨片位置示意图;
33.图10为本发明结构右视图;
34.图11为本发明程序流程图。
35.图中:1种薯进料装置、2种薯琨轮、3切割装置、4分类机构、 5薯块收集装置、11料斗、12棘轮、13料斗支架、14进料板、31传送带a、32芽眼识别装置、33切刀机构、34支架a、41振动板、42 振动器、43筛选支架、51传送带b、52分类识别装置、53拨动装置、 54拨片、55消毒装置、56收集箱、57支架b、111储粮仓、112出粮口。
具体实施方式
36.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
37.请参阅图1-11,本发明提供一种技术方案:一种马铃薯种薯智能切块机,包括料斗11。
38.如图1-6所示,料斗11顶部设置有储粮仓111,底部设置有出粮口112,储粮仓111用于临时储存粮食,出粮口112使粮食匀速从料斗11里流出,保证了粮食均匀流动。料斗11固定安装在料斗支架 13上,料斗11底部固定连接有进料板14,所述料斗支架13左侧固定连接有棘轮12,棘轮12由步进电机带动顺时针旋转,每旋转一定的角度,棘轮12推动进料板14后端抬高一下,使种薯经槽口滑动至种薯琨轮2上,此后进料板14复位。
39.如图1-7所示,料斗支架13右侧固定连接有种薯琨轮2,种薯琨轮2设计为圆台型,尖端向里设置,辊轮机构与水平方向夹角设为 30
°
,根据辊轮之间的空隙,可以筛选出体积较小,不需要切块的种薯,并使得满足切块大小的种薯经滚动后可以按重心平稳放置于种薯琨轮2右侧固定的传送带a31中间。
40.如图1-8所示,传送带a31固定安装在支架a34上,支架a34顶部固定安装有芽眼识别装置32,芽眼识别装置32包括图像采集装置和图像分析装置,图像采集装置和图像分析
装置均固定在横板上,横板通过支架a与机架固定。图像分析装置接收来自于图像采集装置的图像信息,并进行图像处理,以进行切刀选择,保证切割完成后的薯块至少保留一个芽眼,提高了切块效率、保证了种薯切块质量。芽眼识别装置32右侧固定有切刀机构33,且切刀机构33固定安装在支架a34顶部。切刀机构33首先根据检测识别装置识别出的芽眼数量选择刀具,其次根据芽眼分布判断是否需要对刀具进行旋转,如果不需要则直接进行切块。切刀机构33包括旋转机构和传动机构两部分。旋转机构由步进电机和十字转头组成,该装置通过单片机的定时器中断来产生驱动步进电机的驱动信号,由此使步进电机产生角位移,角度编码器与步进电机的转轴相连,以使步进电机在不同的位置时,产生相应于角度的电压输出,进而控制转角,使得刀具旋转一定角度。传动机构用来控制切割装置的上下伸缩,为刀具提高切削力,完成对马铃薯的切割。切刀机构33将刀具分为3组并根据芽眼识别装置32 传来的切割信号选择合适的刀具,对马铃薯种薯进行切块,分别将其切成两块、三块和四块。
41.如图1-4所示,支架a右侧固定有振动器42,振动器42顶部固定安装在振动板41上,振动板41固定安装在筛选支架43上,筛选支架43右侧固定有传送带b51,振动板41一端承接在传送带a31的下料口处,另一端位于传送带b51上方,通过传送带a31上经过切割后的薯种振动下料,在下料的过程中通过振动使薯种更稳定的面(切割面)朝向传送带b51,从而将带有芽眼的一面漏出供后面的分类识别装置52进行识别。
42.如图1-10所示,传送带b51固定安装在支架b57上,,支架b57 顶部固定安装有拨动装置53,拨动装置53包括电机以及拨片54,电机选用摆动式步进电机,以此来带动拨片54在传送带b51上方摆动,实现分类作用,且拨片54与传送带b51之间的间距较小,摆动式步进电机设置在横梁上方,金属拨片54与电机连接,其最低点与传送带b保持有一定间隙,初始状态时与竖直方向呈一定角度,当接收到控制信号后开始拨动动作。拨动装置53左侧固定有分类识别装置52,右侧固定有消毒装置55,且分类识别装置52、消毒装置55固定安装在支架b57顶部,分类识别装置52与拨动装置53电连接,经过传送带a31的识别切割,落在传送带b51上的薯种块再经过分类识别装置 52识别并产生控制信号控制拨动装置53工作或者停止工作,当识别装置21识别出薯种的生命力较低,便输出动作的控制信号,此时拨动装置53将把种薯拨到拨片54正下方前侧并且落入收集器17中,通过此种方式实现对薯种的分类,减少了人工的投入、降低了制种成本。消毒装置设置15在传送带b51的横梁上,包含有水泵、电磁阀、软管、喷头、药液箱、控制器等组件,当薯块由传送带b51输送至消毒装置55时,控制器启动控制电磁阀导通,抽取药液箱内的消毒液由多个喷头雾化后喷洒在薯块表面,完成消毒作业,促进了环境保护。支架b57右侧固定连接有收集箱56,收集箱56的数量为2个,所述 2个收集箱分别位于支架b57右侧以及拨动装置53正下方前侧,分别承接从传送带b51上正常落下的薯种以及被拨动装置53拨动下来的两种不同生命力的薯种块,为便于提取,在收集箱两侧分别设计提手。
43.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
