1.本发明涉及车辆技术领域,特别是涉及一种车辆转弯控制装置和一种车辆。
背景技术:
2.现有技术中,为了改善车辆的转弯特性,通过搭载在车辆上的各种传感器判定车辆的转弯状态,根据传感器的检测值,求出赋予车轮后旋转内圈的制动力的大小和车轮赋予各前轮的驱动力的大小,通过控制与后旋转内圈对应的制动器,以赋予车轮后旋转内圈对应的制动力,以控制车辆转弯。但由于没有考虑路面的摩擦系数,因此不能减轻轮胎的异常磨损和制动片的异常磨损。
技术实现要素:
3.鉴于上述问题,提出了本发明实施例以便提供一种克服上述问题或者至少部分地解决上述问题的一种车辆转弯控制装置和一种车辆。
4.为了解决上述问题,本发明实施例公开了一种车辆转弯控制装置,包括:
5.转向控制装置,用于提供转向辅助力;
6.车辆制动控制装置,包括分别对各车轮进行制动的制动单元和检测车辆行驶状态的行驶状态检测单元,所述车辆制动控制装置用于根据所述行驶状态检测单元的检测值对各车轮进行制动控制;
7.ecu控制单元,用于获取路面摩擦系数,并根据所述路面摩擦系数,控制所述转向控制装置提供的转向辅助力和/或所述车辆制动控制装置提供的制动力。
8.可选地,所述ecu控制单元,具体用于根据所述制动单元的制动力和所述行驶状态检测单元计算出的滑移率,计算路面摩擦系数;以及根据所述路面摩擦系数,控制所述转向控制装置的转向辅助力和/或所述车辆制动控制装置的制动力。
9.可选地,还包括:
10.扭矩检测装置,用于检测施加在转向轴上的转向扭矩;
11.方向盘转角检测装置,用于检测方向盘转角速度;
12.所述ecu控制单元,具体用于根据所述扭矩检测装置的扭矩检测值和所述方向盘转角检测装置的方向盘转角速度检测值,确定所述路面摩擦系数。
13.可选地,所述ecu控制单元,具体用于在所述路面摩擦系数大于预设阈值的情况下,增大所述转向控制装置的转向辅助力,和/或减小所述车辆制动控制装置的制动力。
14.可选地,所述ecu控制单元,具体用于在所述路面摩擦系数小于或等于预设阈值的情况下,增大所述车辆制动控制装置对车辆后轮内圈的制动力。
15.可选地,所述ecu控制单元,还用于根据车身速度检测信号以及方向盘转角大小,判断是否进行车辆转弯控制;若车身速度小于预设速度阈值且方向盘转角大于预设方向盘转角阈值,则控制转向控制装置进行车辆转弯控制;若车身速度小于所述预设速度阈值且方向盘转角小于所述预设方向盘转角阈值,则停止控制。
16.可选地,所述ecu控制单元,还用于根据所述行驶状态检测单元的检测值,计算车轮胎滑动角度;若所述ecu控制单元计算出的路面摩擦系数大于预设摩擦系数阈值,则控制所述车轮胎滑动角度变小;若所述ecu控制单元计算出的路面摩擦系数小于或等于预设摩擦系数阈值,则控制所述轮胎滑动角度变大。
17.本发明实施例还公开了一种车辆,包括:如上述中的车辆转弯控制装置。
18.本发明实施例包括以下优点:转向控制装置,用于提供转向辅助力;车辆制动控制装置,包括分别对各车轮进行制动的制动单元和检测车辆行驶状态的行驶状态检测单元,所述车辆制动控制装置用于根据所述行驶状态检测单元的检测值对各车轮进行制动控制;ecu控制单元,用于计算路面摩擦系数,并根据所述路面摩擦系数,控制所述转向控制装置提供的转向辅助力和/或所述车辆制动控制装置提供的制动力,进而把路面摩擦系数的影响考虑到车辆转弯控制的过程中,从而减轻了转弯过程中轮胎和制动片的异常磨损。
附图说明
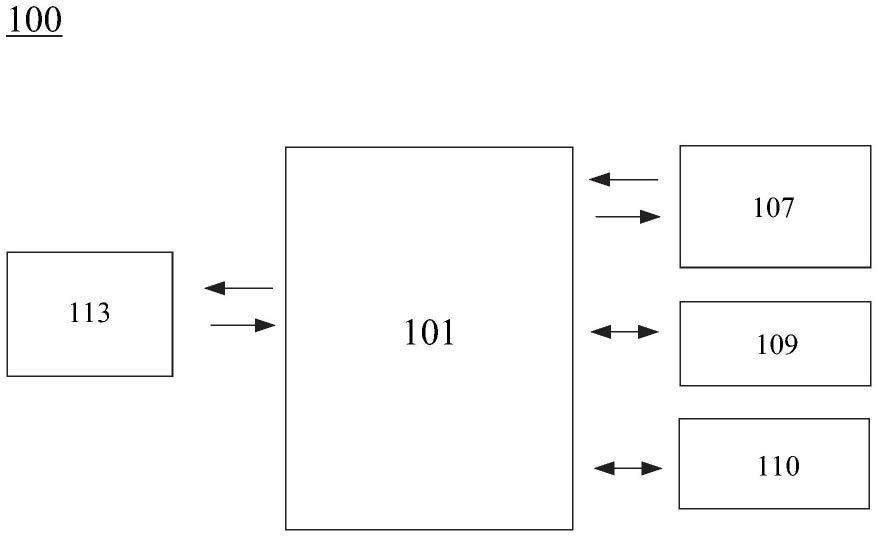
19.图1是本发明实施例提供的一种车辆转弯控制装置的的结构图;
20.图2是本发明实施例提供的一种车辆的结构图;
21.图3是本发明实施例提供的一种车辆转弯控制方法的步骤流程图;
22.图4是发明实施例提供的一种用于说明车辆侧滑角度与车轮胎滑动角度关系的图。
具体实施方式
23.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
24.在使用以往的制动力改善车辆转弯特性的系统中,由于没有考虑路面的摩擦系数,车轮胎发生了的异常磨损和制动片异常磨损,缺乏一种将路面摩擦系数考虑在内,以避免轮胎的异常磨损和制动片异常磨损的装置。
25.本发明实施例的核心构思之一在于,通过ecu控制单元计算路面摩擦系数,根据路面摩擦系数,控制所述转向控制装置提供的转向辅助力和/或所述车辆制动控制装置提供的制动力,进而把路面摩擦系数也作为控制因素,控制车辆转弯,从而减轻轮胎的异常磨损和制动垫的异常磨损。
26.参照图1,示出了本发明实施例提供的一种车辆转弯控制装置的结构图,包括:转向控制装置101,用于提供转向辅助力;车辆制动控制装置102,包括分别对各车轮进行制动的制动单元和检测车辆行驶状态的行驶状态检测单元,所述车辆制动控制装置用于根据所述行驶状态检测单元的检测值对各车轮进行制动控制;ecu控制单元103,用于获取路面摩擦系数,并根据所述路面摩擦系数,控制所述转向控制装置提供的转向辅助力和/或所述车辆制动控制装置提供的制动力。
27.在本发明的实施例中,车辆转弯控制装置还可以设置防侧滑装置(esc),可以使车辆制动控制装置102在进行车辆制动控制的过程中,防止汽车在行驶或制动时车轮打滑,保持车辆转弯时的稳定性,提高车辆的操纵稳定性;可以使转向控制装置101在车辆进行转向控制的过程中,能够进一步防止车辆抖动,保持车辆稳定。
28.车辆在行驶时,车辆转弯控制装置中的控制单元ecu,可以通过调节每个车轮的制动力及发动机/电机的驱动力,改变车辆横摆力矩,确保车辆保持稳定状态。
29.作为一种示例,在车辆转弯控制的过程中,ecu控制单元103可以计算路面摩擦系数,并根据路面摩擦系数,控制转向控制装置调整转向辅助力和/或车辆制动控制装置调整制动力。
30.在本发明的一种实施例中,所述ecu控制单元,具体用于根据所述制动单元的制动力和所述行驶状态检测单元计算出的滑移率,确定路面摩擦系数;以及根据所述路面摩擦系数,控制所述转向控制装置的转向辅助力和/或所述车辆制动控制装置的制动力。
31.作为一种示例,ecu控制单元103,可以从行驶状态检测单元中的车身速传感器104、车轮速传感器105获取车身速度v、车轮速v1,根据车身速度v和车轮速v1,计算滑移率λ,根据制动力和滑移率形成的特性曲线,确定路面摩擦系数。
32.作为一种示例,ecu控制单元103,可以根据路面摩擦系数μ与车轮的滑移率的关系的λ-μ特性曲线,推定计算车轮的滑移率λ对应的路面的摩擦系数μ。λ-μ特性曲线具有变化的特性,即,随着车轮的滑移率λ增大,路面的摩擦系数μ增大,若车轮的滑移率λ达到预设滑移率以上,则随着车轮的滑移率λ的增大,路面的摩擦系数μ逐渐减小。
33.其中,滑移率λ和路面摩擦系数μ的对应关系,可以是预先设定的,不同的车型形成的λ-μ特性曲线不同,本领域技术人员可以根据实际情况进行设置,本发明实施例在此不做限制。
34.在本发明的一种实施例中,车辆转弯控制装置,还包括:扭矩检测装置,用于检测施加在转向轴上的转向扭矩;方向盘转角检测装置,用于检测方向盘转角速度;所述ecu控制单元,具体用于根据所述扭矩检测装置的扭矩检测值和所述方向盘转角检测装置的方向盘转角速度检测值,确定所述路面摩擦系数。
35.作为一种示例,ecu控制单元103,可以实时获取转向扭矩检测值和方向盘转角速度检测值,并根据转向扭矩检测值和所述行驶状态检测单元检测出的车辆方向盘转角速度检测值,形成转向扭矩与车辆方向盘转角速度的特性曲线,根据该特性曲线,确定路面摩擦系数。
36.在本发明的一种实施例中,所述ecu控制单元,具体用于在所述路面摩擦系数大于预设阈值的情况下,增大所述转向控制装置的转向辅助力,和/或减小所述车辆制动控制装置的制动力。
37.作为一种示例,若获取的路面摩擦系数大于预设阈值,则说明当前的路面摩擦系数较大,可以增大转向控制装置的转向辅助力,和/或减小车辆制动控制装置的制动力,以减小车轮胎和制动片的异常磨损。
38.作为一种示例,路面摩擦系数可以是预先标定的,例如,可以预先将夏季的干沥青、湿沥青等标定为不同大小的路面摩擦系数。
39.在本发明的一种实施例中,所述ecu控制单元,具体用于在所述路面摩擦系数小于或等于预设阈值的情况下,增大所述车辆制动控制装置对车辆后轮内圈的制动力。
40.作为一种示例,若获取的路面摩擦系数小于或等于预设阈值,说明当前的路面摩擦系数较小,可以增大车辆制动控制装置对车辆后轮内圈的制动力,防止车辆驶出弯道。
41.作为一种示例,如果取得的路面摩擦系数在预先设定的阈值以下,则表示当前的
路面摩擦系数较小,可以增大车辆制动控制装置对车辆后内轮的制动力,使车辆转弯半径更小,此时轮胎滑移角也会变大。通过路面摩擦系数与制动力的对应关系,可以增大车辆后内轮制动力的控制量,减小车辆转弯半径。根据路面摩擦系数的大小进行车辆转弯控制,达到防止轮胎磨损的目的。
42.作为一种示例,路面摩擦系数可以是预先标定的,例如,可以预先将冬季的冰道、雪道等标定为不同大小的路面摩擦系数。
43.在本发明的一种实施例中,所述ecu控制单元,还用于根据车身速度检测信号以及方向盘转角大小,判断是否进行车辆转弯控制;若车身速度小于预设速度阈值且方向盘转角大于预设方向盘转角阈值,则控制转向控制装置进行车辆转弯控制;若车身速度小于所述预设速度阈值且方向盘转角小于或等于所述预设方向盘转角阈值,则停止控制。
44.作为一种示例,在车辆转弯控制的过程中,可以通过车身速传感器104获取车身速度,当车身速度低于预设速度阈值且方向盘转角大于预设方向盘转角阈值时,ecu控制单元103可以控制转向控制装置进行车辆转弯控制。例如,方向盘旋转产生扭矩,扭矩传感器将扭矩传感信号发送至ecu控制单元103,ecu控制单元103产生控制信号,并发送至马达,马达根据控制信号运转,并通过暖齿轮传递到机架与齿轮机构,进而通过机架与齿轮机构控制转向轮。在辅助力转向控制的过程中,可以根据计算出的转向控制装置控制量的控制值,保持或减小辅助力,或使方向盘转角返回进行控制;和/或根据车辆制动控制装置的控制量制动车轮后内轮,计算轮缸压力(制动力)赋予车轮后内圈进行制动。
45.例如,若车身速度小于预设速度且方向盘转角大于预设方向盘转角阈值,则控制制动液压变小,从而减小制动力;若车身速度小于预设速度且方向盘转角小于或等于预设方向盘转角阈值时,停止控制,将转弯控制的控制量设为复位“0”。
46.在本发明的一种实施例中,所述ecu控制单元,还用于根据所述行驶状态检测单元的检测值,计算车轮胎滑动角度;若所述ecu控制单元计算出的路面摩擦系数大于预设摩擦系数阈值,则控制所述车轮胎滑动角度变小;若所述ecu控制单元计算出的路面摩擦系数小于或等于预设摩擦系数阈值,则控制所述轮胎滑动角度变大。
47.作为一种示例,可以根据行驶状态检测单元检测出的车身速度v、车轮速v1、偏航率ψ、横向加速度yg等检测值计算车辆侧滑角度β,根据车辆侧滑角度β,计算各个车轮胎的滑动角度。若ecu控制单元103计算出的路面摩擦系数大于预设摩擦系数阈值,则控制车轮胎滑动角度变小;若ecu控制单元103计算出的路面摩擦系数小于或等于预设摩擦系数阈值,则控制所述轮胎滑动角度变大。
48.此外,作为一种示例,还可以根据车轮胎滑动角度,进一步判断判断是否允许进行车辆转弯控制。其中,车辆转弯控制装置可以独立控制该车辆的每一个车轮。例如,可以在车轮胎的滑动角度大于极限阈值的情况下,禁止车辆转弯控制,如控制制动控制装置保持制动控制的制动力,控制转向控制装置保持或减少转向辅助力,或者拨回方向盘。可以在车轮胎的滑动角度小于或等于极限阈值的情况下,根据车轮胎滑动角度的大小,计算车辆控制装置需要调整对车轮控制的控制量,例如,根据车轮后旋转内圈的轮胎滑动角度,调整车辆控制装置的制动液压,对车轮前旋转外圈或所述车轮后旋转内圈,赋予相应的制动力进行控制。
49.作为一种示例,车辆控制装置可以分别控制同一车辆的不同的车轮,各个车轮被
独立控制,本领域技术人员可以根据实际情况进行操作控制车轮,本发明实施例在此不做限制。
50.在本发明实施例中,转向控制装置,用于提供转向辅助力;车辆制动控制装置,包括分别对各车轮进行制动的制动单元和检测车辆行驶状态的行驶状态检测单元,所述车辆制动控制装置用于根据所述行驶状态检测单元的检测值对各车轮进行制动控制;ecu控制单元,用于计算路面摩擦系数,并根据所述路面摩擦系数,控制所述转向控制装置提供的转向辅助力和/或所述车辆制动控制装置提供的制动力,进而把路面摩擦系数的影响考虑到车辆转弯控制的过程中,从而减轻了转弯过程中轮胎和制动片的异常磨损。
51.参照图3,示出了本发明实施例提供的一种车辆转弯控制方法的步骤流程图,所述方法具体可以包括如下步骤:
52.流程开始:
53.s1,获取车辆各个传感器的检测值;
54.示例性地,ecu控制单元103可以分别从车身速传感器104、车轮速传感器105、偏航传感器106、横g传感器107中获取对应的车身速度v、车轮速v1、偏航率ψ、横向加速度yg等检测值。
55.s2,行驶状态检测单元根据各个传感器的检测值,运算车辆行驶状态;
56.需要说明的是,这里的车辆行驶状态,可以包括车辆控制装置的制动系统对车轮赋予制动力的制动状态、驾驶者操作方向盘而使方向盘转角θ变化的转向状态、以及除上述任一状态的通常状态。即车辆行驶状态可以是制动状态、转向状态或通常状态中的任一种状态,本发明实施例在此不做限制。
57.s3,运算车辆的侧滑角度;
58.在具体的实施中,车辆的滑移角度β可以是根据横g传感器107的检测值yg、车身速传感器104的检测值v和偏航率传感器106的检测值ψ的关系求出的。
59.如:dβ/dt=yg/v-ψ
60.其中,需要说明的是,关于积分误差的去除,可以在横向加速度和横摆率为0时设为0。
61.s4,运算车辆的轮胎滑动角度;
62.示例性地,可以将车辆简化为2轮模型,车轮胎的滑动角度根据以下公式进行运算:
[0063][0064][0065]
如图4所示的本发明实施例提供的一种用于说明车辆侧滑角度与车轮胎滑动角度关系的图,其中,αv和αh分别为车辆前、后车轮滑动角度;δv为前轮转向角,δh为后轮的前束角;v为车身速度;β为车辆侧滑角度;lv和lh为车辆质心分别到前轴、后轴的距离;ψ为车辆横摆角速度(也即偏航率)。
[0066]
示例性地,还可以根据车辆侧滑角度β和车辆横摆角速度ψ形成的特性曲线确定车
辆侧滑角度β的特征值。在车辆稳定性的控制过程中,可以通过将车辆侧滑角度β限定在特征值的范围内,既保持车辆在紧急工况时不会发生侧滑,同时又保证车辆的横摆角速度ψ的增益在合理范围内。控制单元会在达到特征值之前就对其进行控制,以保证车轮能够进行正常的制动或者驱动,产生足够的附加横摆力矩来维持车辆稳定。
[0067]
另外,β-ψ特征曲线的对应关系,可以是预先设置的,不同的车型形成的β-ψ特性曲线不同,本领域技术人员可以根据实际情况进行设置,本发明实施例在此不做限制。
[0068]
s5,判断允许或者禁止车辆转弯控制;
[0069]
示例性地,可以根据车身速度大小以及方向盘转角大小判断是否进行车辆转弯控制;如,车身速度低于预设速度以及方向盘转角大于预设角度时,ecu控制单元控制转向控制装置进行车辆转弯控制,或控制制动控制装置进行制动力控制;否则,禁止控制,将转弯控制的控制量设为复位“0”。
[0070]
s6,判断车辆转弯控制是否继续;
[0071]
示例性地,车轮前回转外圈或车轮后回转内圈的轮胎滑动角度超过预设阈值时,轮胎的磨损和垫的磨损会变大,所以无论哪个车轮或者两个车轮的滑动角度超过一定值后,都需要禁止控制。若各车轮胎的滑动角度均在阈值以下,则根据轮胎滑动角度对后内圈赋予制动力。
[0072]
s7,若车辆转弯控制判定为继续,则运算需要进行控制的制动力;
[0073]
示例性地,可以根据车辆转弯控制过程中的方向盘转角大小与制动力的对应关系,得到对应的制动力的运算值,并将制动力的运算值转化为轮缸压力的值,可以通过轮缸压力(即制动力)赋予车轮进行制动。
[0074]
s8,运算车辆侧滑角度的极限阈值;
[0075]
s9,根据车辆侧滑角度的极限阈值,调整转向辅助力和制动力;
[0076]
例如,在车辆转弯控制的过程中,若车辆侧滑角度达到极限阈值,则可以保持转向辅助力或保持制动力或使方向盘转角往返回的方向进行辅助。
[0077]
s10,运算出的制动力赋予车轮胎后内圈;
[0078]
s11,若车辆转弯控制判定为不继续,则禁止控制;
[0079]
流程结束。
[0080]
需要说明的是,对于方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本发明实施例并不受所描述的动作顺序的限制,因为依据本发明实施例,某些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作并不一定是本发明实施例所必须的。
[0081]
本发明实施例还提供了一种车辆,包括:如上述实施例中的车辆转弯控制装置。
[0082]
本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。
[0083]
本领域内的技术人员应明白,本发明实施例的实施例可提供为方法、装置、或计算机程序产品。因此,本发明实施例可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明实施例可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上
实施的计算机程序产品的形式。
[0084]
本发明实施例是参照根据本发明实施例的方法、终端设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理终端设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理终端设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0085]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理终端设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0086]
这些计算机程序指令也可装载到计算机或其他可编程数据处理终端设备上,使得在计算机或其他可编程终端设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程终端设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0087]
尽管已描述了本发明实施例的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明实施例范围的所有变更和修改。
[0088]
最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的相同要素。
[0089]
以上对本发明所提供的一种车辆转弯控制装置和一种车辆,进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。