1.本发明涉及移动机器人轨迹跟踪控制技术,特别涉及一种基于模糊滑模控制的全向移动机器人轨迹跟踪方法。
背景技术:
2.轨迹跟踪控制属于机器人系统底层的运动控制问题,其主要作用是根据参考轨迹与参考系统变量决定系统每一时刻的控制输人,使移动机器人在稳定状态下的跟踪误差收敛为零。由于移动机器人能精准地按照操作者的意图来运动是实现更加丰富的功能和执行更加复杂多变的任务的前提,所以轨迹跟踪控制器的设计一直是改善机器人系统性能的一个重点研究方向。
3.目前,常见的轨迹跟踪控制方法有非线性反馈控制法,滑模变结构控制方法,反演控制法,自适应控制法,模型预测控制法,除了以上介绍的几种控制方法外,还有智能控制方法、h∞鲁棒控制等。但因为每种方法都有其局限性,并不能适用于所有的控制系统。
技术实现要素:
4.本发明的目的是提供一种基于模糊滑模控制的全向移动机器人轨迹跟踪方法,能减弱系统抖振,还能保持滑模变结构控制的快速响应和强鲁棒性能的特点,提高收敛速度,具有较高的控制精度。
5.本发明的上述技术目的是通过以下技术方案得以实现的:
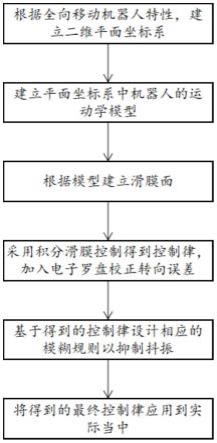
6.一种基于模糊滑模控制的全向移动机器人轨迹跟踪方法,包括有以下步骤:
7.s1、根据全向移动机器人特性,建立二维平面坐标系,选取机器人的几何中心建立跟踪位置坐标系,建立平面绝对坐标系xoy,跟踪坐标系x
totyt
,o
t
位于移动机器人的几何中心;建立全向移动机器人的运动学模型:
[0008][0009]
式中,r为轮子半径;ωi(i=1,2,
…
4)为各轮子的角速度;l,b分别为轮子轮心到坐标系x
totyt
纵轴和横轴的间距;v
x
,vy为机器人的x轴,y轴的平移速率;ω为机器人旋转的转速;θ为机器人与xoy坐标系x轴的夹角;
[0010]
s2、假定绝对坐标系的初始位姿为c=[x,y,θ]
t
,期望位姿g=[xg,yg,θg]
t
,全向移动机器人线速度与角速度在绝对坐标系下的映射关系为
[0011][0012]
拆解后微分得到:
[0013][0014][0015][0016]
给出机器人运动的二维平面上规划的期望位姿,假定全向移动机器人的参考位姿pc=[xg,yg,θg]
t
,得到跟踪位姿误差量pe,参考速率qc=[vg,ωg]
t
,全向移动机器人系统输出为当前速率q
t
=[v
t
,ω
t
]
t
,得到状态方程建立滑模面:
[0017]
式中,θe为航向角误差;xe,ye是x
t
,y
t
轴向误差;ωe为器人转动的角速度;vg为速度指令;ωg为角速度指令;ω
t
为期望位姿的机器人转速;v
t
为期望位姿机器人的速率;
[0018]
s3、采用积分滑模控制方法基于滑模面设计系统状态得到控制律;
[0019]
s4、使用电子罗盘对转向过程中产生的角度偏差进行校正;
[0020]
s5、设计连续函数及模糊控制器,抑制控制中的抖振;
[0021]
s6、得到最终控制律,进行实际应用。
[0022]
综上所述,本发明具有以下有益效果:
[0023]
将模糊滑模控制应用于全向移动机器人的轨迹跟踪问题上,使用滑模变结构控制保证系统稳定性,且使滑动模态具有良好动态,由模糊控制器调整模糊运动段特性以减弱抖振;加入了电子罗盘对转向过程中产生的角度误差进行校正,加快模糊运动段的响应速度,同时减少了复杂的计算推导,具有较好的鲁棒性,跟踪精度更好,保证了系统的稳定性;对于研究现阶段的全向移动机器人轨迹跟踪问题,以及寻找新的解决思路都具有重要的现实意义。
附图说明
[0024]
图1为本方法的流程示意图;
[0025]
图2为二维平面上机器人的位姿示意图。
具体实施方式
[0026]
以下结合附图对本发明作进一步详细说明。
[0027]
根据一个或多个实施例,公开了一种基于模糊滑模控制的全向移动机器人轨迹跟踪方法,包括有以下步骤:
[0028]
s1、根据全向移动机器人特性,建立二维平面坐标系,选取机器人的几何中心建立跟踪位置坐标系,建立平面绝对坐标系xoy,跟踪坐标系x
totyt
,o
t
位于移动机器人的几何中心;建立全向移动机器人的运动学模型:
[0029]
[0030]
式中,r为轮子半径;ωi(i=1,2,
…
4)为各轮子的角速度;l,b分别为轮子轮心到坐标系x
totyt
纵轴和横轴的间距;v
x
,vy为机器人的x轴,y轴的平移速率;ω为机器人旋转的转速;θ为机器人与xoy坐标系x轴的夹角。
[0031]
各轮之间的速度约束关系ω1 ω3=ω2 ω4,v
x
=v
t cosθ,vy=v
t sinθ,v
t
为线速度。
[0032]
s2、假定绝对坐标系的初始位姿为c=[x,y,θ]
t
,期望位姿g=[xg,yg,θg]
t
,全向移动机器人线速度与角速度在绝对坐标系下的映射关系为
[0033][0034]
拆解后微分得到:
[0035][0036][0037][0038]
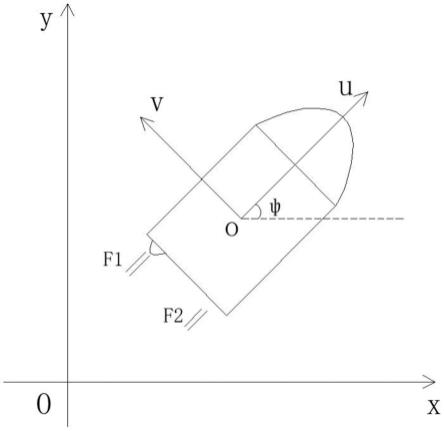
给出机器人运动的二维平面上规划的期望位姿,如图2所示,假定全向移动机器人的参考位姿pc=[xg,yg,θg]
t
,得到跟踪位姿误差量pe,参考速率qc=[vg,ωg]
t
,全向移动机器人系统输出为当前速率q
t
=[v
t
,ω
t
]
t
,得到状态方程建立滑模面。
[0039]
式中,θe为航向角误差;xe,ye是x
t
,y
t
轴向误差;ωe为器人转动的角速度;vg为速度指令;ωg为角速度指令;ω
t
为期望位姿的机器人转速;v
t
为期望位姿机器人的速率。
[0040]
s3、采用积分滑模控制方法基于滑模面设计系统状态得到控制律。
[0041]
由于机器人控制系统为多输入多输出系统,为加快趋近速率,设计基于sigmoid饱和函数的滑模切换函数:
[0042][0043][0044]
求导得:
[0045][0046]
令得到等效控制律为
[0047][0048]
对切换控制的相关增益系数εi,采取积分的方法进行估计:
[0049][0050]
其中,ζi>0为调整系数,则
[0051][0052]
其中,为正对角阵调整系数。
[0053]
s4、使用电子罗盘对转向过程中产生的角度偏差进行校正。
[0054]
电子罗盘标准的转换计算式如下:
[0055]
xr=x cosα y sinαsinβ-z cosβsinα
[0056]
yr=x cosβ z sinβ
[0057]
式中,xr和yr为要转换到水平位置的值,x、y、z为三个方向的矢量值,α为俯仰角,β为侧倾角。
[0058]
由于角度的返回值为十六进制数,于是角度计算公式如下:
[0059]
实际角度=(转换为10进制数据域-20000)/100。
[0060]
s5、设计连续函数及模糊控制器,抑制控制中的抖振。
[0061]
用连续函数取代符号函数的切换控制削弱抖振和外界扰动的影响:
[0062][0063]
式中:k1k2ε1ε2都是大于0的数,δ1δ2是趋于0的正小数,得到积分滑模轨迹跟踪控制律为:
[0064]
u=u
″
ep
u
″
saw
;
[0065]
设计2个模糊控制器分别对δk1,x1及δk2,x2进行调节以减弱抖振,选择滑模切换函数与其对时间的倒数的乘积作为模糊系统的输入,模糊控制器的输出则是切换控制的相关估计参数δk1,x1及δk2,x2的值。
[0066]
选择论域为[-1,1]的模糊控制器1作为输入,选取切换控制中论域分别为[-0.1,0.1]和[-2,2]的参数δk1为控制输出系统的输入输出,模糊集合定义如下:
[0067]
[0068][0069]
δk1={nb,nm,ms,nl,zo,pl,ps,pm,pb}
[0070]
其中,nb、nm、ns、nl、zo依次表示为“负大”、“负较大”、“负中”、“负小”、“零”;pl、ps、pm、pb依次表示为“正小”、“正中”、“正较大”、“正大”;
[0071]
建立模糊控制规则表,如下:
[0072][0073]
使用合成推理法得到相关量之间的模糊关系,推导出模糊决策,采取“重心法”进行反模糊化得到输出值,得到最终的模糊滑模控制律:
[0074][0075]
s6、得到最终控制律,进行实际应用。
[0076]
综合考虑模糊控制和滑模控制各自在控制领域的优异表现,将二者结合,进一步搭建了一种模糊滑模控制器,对切换控制中的参数εi(i=1,2)采用积分的策略进行估计,运用一对模糊控制器对切换控制的相关参数δkik(i=1,2)进行调整,针对机器人在转向过程中产生的角度误差问题,加入了电子罗盘对角度进行校正。这种相对简单且计算量不是很复杂的设计技巧使得控制目的易于实现,同时展现出了良好的轨迹跟踪品质,可很好地减弱系统由于开关切换引起的抖振现象,同时维持了滑模控制和模糊控制的优点。
[0077]
将模糊滑模控制应用于全向移动机器人的轨迹跟踪问题上,使用滑模变结构控制保证系统稳定性,且使滑动模态具有良好动态,由模糊控制器调整模糊运动段特性以减弱抖振;加入了电子罗盘对转向过程中产生的角度误差进行校正;在系统状态点远离切换线时,加大控制作用,加快模糊运动段的响应速度,同时减少了复杂的计算推导,具有较好的鲁棒性,跟踪精度更好,保证了系统的稳定性。对于研究现阶段的全向移动机器人轨迹跟踪问题,以及寻找新的解决思路都具有重要的现实意义。
[0078]
本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。