1.本发明属于井下防爆运输机器人控制技术领域,具体涉及一种井下防爆物料运输机器人多智能体控制装置。
背景技术:
2.煤矿开采危险岗位主要分布在运输、掘进、采煤、巡检等作业地点,在这些危险岗位的井下矿工人数占到近60%。为从根源上解决煤炭行业的安全生产问题,同时提高煤矿生产的效率,亟需煤矿机器人替代矿工完成高危作业,开创智能采矿新时代。因此,煤矿井下防爆运输机器人,可实现煤矿井下综采、综掘工作面无轨运输系统的智能化、少人化目标,达到煤矿智能开采的目的。煤矿井下无轨运输机器人是煤矿机器人体系中的重要组成部分,实现无轨运输机器人的自主行进,是减少煤矿井下高危作业矿工人数、实现工作面智能化、无人化作业的关键一步。由于井下工况复杂,井下防爆物料运输机器人的结构复杂,难以实现智能化和一体化控制,因此,为了解决煤矿井下无轨运输过程中车辆司机的安全问题,减小劳动强度,改善劳动环境,提升无轨运输生产效率,实现综采、综掘工作面无轨运输系统的智能化、少人化目标,需要研究并提供一种井下防爆物料运输机器人多智能体控制装置。
技术实现要素:
3.本发明克服现有技术存在的不足,所要解决的技术问题为:提供一种性能可靠、操作方便、可以满足井下复杂的工况的井下防爆物料运输机器人多智能体控制装置,以实现井下防爆物料运输机器人的智能化控制。
4.为了解决上述技术问题,本发明采用的技术方案为:一种井下防爆物料运输机器人多智能体控制装置,包括隔爆箱体,所述隔爆箱体内设置有接线腔和主腔,所述接线腔和主腔之间设置有穿腔端子,所述主腔内设置有控制电路,所述隔爆箱体上设置有控制接口和第一通信接口;所述控制电路包括:隔离器、智能逻辑控制器、主设备终端控制器、辅助设备终端控制器、多通信口智能控制器和视觉处理主机;所述智能逻辑控制器和视觉处理主机均通过隔离器与所述多通信口智能控制器通信连接;所述多通信口智能控制器的输出端通过隔离器与主设备终端控制器连接,所述智能逻辑控制器的输出端与辅助设备终端控制器连接;所述主设备终端控制器和辅助设备终端控制器通过所述接线腔后连接所述控制接口,所述控制接口用于连接外部设备终端;所述多通信口智能控制器通过隔离器、接线腔后与所述第一通信接口连接,所述第一通信接口用于连接外部传感器终端;所述视觉处理主机用于接收机器人传感器终端发送的传感信号,以及获取得到的防爆运输机器人行驶状态信息,计算得到最优路径规划,并将对应的第一控制信号发送至所述多通信口智能控制器;所述多通信口智能控制器用于接收视觉处理主机发送的第一控制信号和外部传
感器终端发送的传感信号,并根据控制信号和传感信号,计算得到最终的第二控制信号后发送给所述主设备终端控制器和智能逻辑控制器;所述智能逻辑控制器的输入输出端经接线腔后通过所述控制接口与急停开关、制动比例阀和解制动电磁阀连接,用于根据多通信口智能控制器发送的第二控制信号控制所述制动比例阀和解制动电磁阀的动作,还用于根据所述急停开关发送的急停信号,控制所述制动比例阀动作。
5.所述隔离器为can隔离栅,所述第一通信接口包括lan接口和can通信接口;所述控制电路还包括交换机,所述交换机与所述视觉处理主机连接,所述传感器终端发送的图像信号通过lan接口、接线腔后与所述交换机连接;所述传感器终端发送的雷达信号通过can通信接口、接线腔后,通过can隔离栅与所述视觉处理主机和多通信口智能控制器连接。
6.所述主设备终端控制器包括行走电机控制器和转向电机控制器,所述行走电机控制器和转向电机控制器通过所述接线腔和控制端口后分别连接行走电机和控制电机;所述辅助设备终端控制器包括油泵电机控制器;油泵电机控制器通过所述接线腔和控制端口后连接油泵电机。
7.所述控制电路还包括风扇电机控制器和灯光控制器,所述智能逻辑控制器的输出端与灯光控制器连接,用于向灯光控制器输出控制信号,所述灯光控制器的输出端通过接线腔、控制接口连接照明灯。
8.所述的一种井下防爆物料运输机器人多智能体控制装置,还包括无线通信定位模块和移动通信模块;所述无线通信定位模块与所述交换机lan连接,用于将实时定位信息发送至集控中心,所述移动通信模块与所述多通信口智能控制器连接,用于将防爆运输机器人的实时状态参数信息发送至集控中心。
9.所述主腔内还设置有开关电源,所述隔爆箱体上还设置有电源输入端子,所述开关电源的输入端通过所述电源端子与外接电源连接,用于进行电压转换后输出直流电压给所述隔离器、智能逻辑控制器、多通信口智能控制器和视觉处理主机供电。
10.所述主腔内还设置有电源控制板,所述隔爆箱体上设置有电源输出端子,所述电源控制板的输入端与开关电源的输出端连接,输出端与所述电源输出端子连接,用于向所述传感器终端提供5v直流供电。
11.所述隔爆箱体上还设置有用于连接综合保护装置的第二通信接口,所述多通信口智能控制器通过隔离器、接线腔后与所述第二通信接口连接;所述多通信口智能控制器还用于根据所述综合保护装置发送的保护信号,计算得到最终的第二控制信号后发送给转向电机控制器、行走电机控制器和智能逻辑控制器。
12.所述隔爆箱体上还设置有用于连接外接电源的通信端子的第三通信接口,所述多通信口智能控制器通过隔离器、接线腔后与所述第三通信接口连接,用于监测外接电池的工作状态。
13.所述的一种井下防爆物料运输机器人多智能体控制装置,还包括显示模块,所述显示模块设置在隔爆箱体上,并通过所述接线腔与所述视觉处理主机连接。
14.本发明与现有技术相比具有以下有益效果:本发明提供了一种井下防爆物料运输机器人多智能体控制装置,通过设置智能逻辑控制器、多通信口智能控制器和视觉处理主
机,可以实现与机器人外部不同设备的信息交互与控制,实现运输机器人的自动控制;其通过视觉处理主机接收传感器终端获取的传感信息,并进行路径规划得到第一控制命令,利用多通信口智能控制器与外部传感终端设备进行信息交互,进一步得到更为可靠的第二控制命令,通过控制命令控制外部主设备(行走转向电机)的动作,同时,利用智能逻辑控制器控制外部辅助设备的动作,提高了井下防爆物料运输机器人的控制可靠性,适用于煤矿井下电驱动车辆。
附图说明
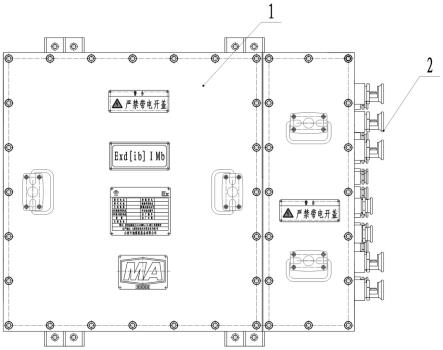
15.图1为本发明实施例提供的一种井下防爆物料运输机器人多智能体控制装置的机械结构示意图;图2为图1的左视图;图3为图1的俯视图;图4为图1的剖视图;图5为本发明实施例提供的一种井下防爆物料运输机器人多智能体控制装置的控制电路的结构框图;图6为本发明实施例提供的一种井下防爆物料运输机器人多智能体控制装置的的控制电路的具体连接示意图;图中:1-隔爆箱体,2-接口,3-显示器玻璃窗,4-激光雷达、深度相机显示窗,5-急停开关,6-水道进口,7-水道出口,8-接线腔门板,9-主腔门板,10-穿腔端子,11-强电接线柱,12-接线腔,13-主腔,ic1-行走电机控制器,ic2-第一熔断器,ic3-第二熔断器,ic4-第一开关电源,ic5-第二开关电源,ic6-can隔离栅,ic7-移动通信模块,ic8-多通信口智能控制器,ic9-显示模块,ic10-视觉处理主机,ic11-无线通信定位模块,ic12-交换机,ic13-视觉控制装置,ic14-第二激光雷达,ic15-第二深度相机,ic17-电源控制板,ic18-激光雷达,ic19-风扇电机控制器,ic20-水泵电机控制器,ic21-第一转向电机控制器,ic22-第二转向电机控制器,ic23-智能逻辑控制器,ic24-制动比例阀,ic25-油泵电机控制器,ic26-行走电机,ic27-急停开关,ic28-解制动电磁阀,ic29-综合保护装置,ic30-油泵电机,ic31-保护传感器总成,ic32-灯光总成,ic33-风扇电机、ic34-灯光控制器、ic35-水泵电机、ic36-风扇电机,ic38-深度相机,ic39-第一转向电机,ic40-第二转向电机,s-大容量锂离子蓄电池。
具体实施方式
16.为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.本发明实施例提供了一种井下防爆物料运输机器人多智能体控制装置,如图1~4所示,包括隔爆箱体1,所述隔爆箱体1内设置有接线腔12和主腔13,所述接线腔12和主腔13之间设置有穿腔端子10和强电接线柱11,所述主腔13内设置有控制电路,所述隔爆箱体1上设置有接口2,所述接口包括控制接口和第一通信接口。隔爆箱体1上与主腔对应位置设置
有水道进口6和水道出口7,对主腔内设备进行降温,接线腔12和主腔13上分别设置有接线腔门板8和主腔门板9。
18.具体地,如图5~6所示,本实施例中,所述控制电路包括:隔离器、智能逻辑控制器ic23、主设备终端控制器、辅助设备终端控制器、多通信口智能控制器ic8和视觉处理主机ic10;所述智能逻辑控制器ic23和视觉处理主机ic10均通过隔离器与所述多通信口智能控制器ic8通信连接;所述多通信口智能控制器ic8的输出端通过隔离器与主设备终端控制器连接,所述智能逻辑控制器ic23的输出端与辅助设备终端控制器连接;所述主设备终端控制器和辅助设备终端控制器通过所述接线腔12后连接所述控制接口,所述控制接口用于连接外部设备终端;所述多通信口智能控制器ic8通过隔离器、接线腔12后与所述第一通信接口连接,所述第一通信接口用于连接外部传感器终端;所述视觉处理主机ic10用于接收机器人传感器终端发送的传感信号,以及获取得到的防爆运输机器人行驶状态信息,计算得到最优路径规划,并将对应的第一控制信号发送至所述多通信口智能控制器ic8;所述多通信口智能控制器ic8用于接收视觉处理主机ic10发送的第一控制信号和外部传感器终端发送的传感信号,并根据控制信号和传感信号,计算得到最终的第二控制信号后发送给所述主设备终端控制器和智能逻辑控制器ic23;所述智能逻辑控制器ic23的输入输出端经接线腔12后通过所述控制接口与急停开关、制动比例阀和解制动电磁阀连接,用于根据多通信口智能控制器ic8发送的第二控制信号控制所述制动比例阀和解制动电磁阀的动作,还用于根据所述急停开关发送的急停信号,控制所述制动比例阀动作。
19.进一步地,如图6所示,本实施例中,所述隔离器为can隔离栅ic6,所述第一通信接口包括lan接口和多个can通信接口;所述控制电路还包括交换机ic12,所述交换机ic12与所述视觉处理主机ic10连接,所述传感器终端发送的图像信号通过lan接口、接线腔12后与所述交换机连接;所述传感器终端发送的雷达信号通过can通信接口、接线腔后,通过can隔离栅与所述视觉处理主机ic10和多通信口智能控制器ic8连接。
20.多通信口智能器ic8与视觉主机ic10、外部传感器终端、行走电机控制器ic1、转向电机控制器ic22和ic23、智能逻辑控制器ic23、电池管理单元bms、综合保护装置ic29之间均采用通过can隔离栅采用can通信方式进行信息交互。
21.进一步地,如图6所示,本实施例中,所述主设备终端控制器包括行走电机控制器ic1和转向电机控制器,其中,转向电机控制器有2个,分别为第一转向电机控制器ic21机控制器ic22,述行走电机控制器和转向电机控制器通过所述接线腔12和控制端口后分别连接行走电机ic26和两个转向电机ic39和ic40。具体地,本实施例中,所述辅助设备终端控制器包括油泵电机控制器ic25,油泵电机控制器ic25通过所述接线腔12和控制端口后连接油泵电机。行走电机ic26三根动力电缆及两根直流母线动力电缆通过引入装置进入接线腔,然后接入接线柱,通过接线柱引入主腔,通过动力电缆接入行走电机三相输出端和正负母线输入端。油泵电机动力电缆通过相同的方式接入油泵电机控制器,转向电机与控制器总成通过相同的方式接入dc24开关电源、风扇电机按照相同的方式接入风扇电机控制器。
22.进一步地,如图6所示,本实施例中,所述控制电路还包括风扇电机控制器和灯光控制器,所述智能逻辑控制器ic23的输出端与灯光控制器ic34连接,用于向灯光控制器ic34输出控制信号,所述灯光控制器ic34的输出端通过接线腔12、控制接口连接照明灯。
23.进一步地,本实施例的一种井下防爆物料运输机器人多智能体控制装置,还包括
无线通信定位模块和移动通信模块;所述无线通信定位模块ic7与所述交换机通过lan连接,用于将实时定位信息发送至集控中心,所述移动通信模块ic7与所述多通信口智能控制器ic8连接,用于将防爆运输机器人的实时状态参数信息发送至集控中心。
24.进一步地,如图6所示,本实施例中,所述主腔13内还设置有开关电源,所述隔爆箱体1上还设置有电源输入端子,所述开关电源的输入端通过所述电源端子与外接电源连接,用于进行电压转换后输出直流电压给所述隔离器、智能逻辑控制器ic23、多通信口智能控制器ic8和视觉处理主机ic10供电。
25.具体地,本实施例中,开关电源包括第一开关电源ic4和第二开关电源ic5,所述第一开关电源ic4和第二开关电源ic5用于对外接电源提供的高压直流电压进行电压转换后为主腔内的设备提供48v和24v直流电压。具体地,外接电源可以为大容量锂离子蓄电池,其输出电压为320v直流。锂离子储电池的电源箱通过can通信与多通信口智能控制器的can通信口相连,大容量锂离子蓄电池正极与开关电源正极相连,大容量锂离子蓄电池负极与开关电源负极相连。大容量锂离子蓄电池位于防爆运输机器人后侧。
26.进一步地,如图6所示,本实施例中,所述主腔13内还设置有电源控制板ic17,所述隔爆箱体1上设置有电源输出端子,所述电源控制板ic17的输入端与开关电源的输出端连接,输出端通过接线腔与所述电源输出端子连接,用于向所述传感器终端提供5v直流供电。
27.进一步地,如图5~6所示,本实施例中,所述隔爆箱体1上还设置有用于连接外部综合保护装置ic29的第二通信接口,所述多通信口智能控制器ic8通过隔离器、接线腔12后与所述第二通信接口连接;所述多通信口智能控制器ic8还用于根据所述综合保护装置ic29发送的保护信号,计算得到最终的第二控制信号后发送给转向电机控制器ic22、ic23,行走电机控制器ic1和智能逻辑控制器ic23。
28.进一步地,如图5~6所示,本实施例中,所述隔爆箱体1上还设置有用于连接外接电源的通信端子的第三通信接口,所述多通信口智能控制器ic8通过隔离器、接线腔12后与所述第三通信接口连接,进而接收和监测外接电池的工作状态信息。
29.进一步地,如图5~6所示,本实施例所述的一种井下防爆物料运输机器人多智能体控制装置,还包括显示模块ic9,所述显示模块ic9设置在隔爆箱体1上,并通过所述接线腔12与所述视觉处理主机ic10连接。显示模块可以实时显示机器人车体运行信息,雷达信息和深度相机信息。本实施例的运输机器人,在车体四周分别设置一个传感器终端,所述传感器终端包括视觉控制装置ic13、灯光控制器ic34、激光雷达18和深度相机ic34,可以采集机器人车身的环境信息,此外,如图6所示,当车身还设置有额外的传感器件,例如第二激光雷达ic14和第二深度相机ic15时,通过在所述隔爆箱体1上还设置有通过接线腔与视觉处理主机连接的usb接口和can接口,也可以实现额外传感信号到视觉处理主机ic10的传输,使得本发明实施例的井下防爆物料运输机器人多智能体控制装置扩展性强。
30.进一步地,本实施例中,智能逻辑控制器还通过控制接口连接声光报警模块,所述声光报警器控制电缆通过引入装置进入接线腔,经穿腔端子进入主腔,穿腔端子电缆与输出继电器相连,输出继电器的控制端与所述智能逻辑控制器ic23的输出端连接。灯光照明同样按照同样的方式接入灯光控制器输出端。综合保护装置采用专用屏蔽电缆通过引入装置接入接线腔,接入端子排。然后通过屏蔽穿腔端子进入主腔,使用屏蔽电缆接入can隔离器。急停开关机械部分安装与电控箱外侧,急停开关内部电气部分安装与电控箱内侧与外
侧机械部分联动,急停开关电气部分采用低压控制电缆接入输入继电器。进一步将急停信号传输至多通信口智能控制器。门闭锁、行车制动压力传感器、行车制动比例阀均用相同的方式采用4芯电缆接入智能逻辑控制器。
31.本发明的工作原理如下:大容量蓄电池s向第一开关电源ic5实时供电,实现dc320v向dc24v的转换,开关电源ic24输出dc24v正负极与多通信口智能控制器ic8、逻辑智能控制器ic23、视觉主机ic10、can隔离栅ic6、灯光控制器ic34、水泵电机控制器ic20、交换机ic12、移动通信模块ic7、转向电机ic39和ic40、风扇电机ic33、综合保护主机ic29、电源控制器板ic17供电输入端正负极对应连接。大容量蓄电池s向同时向第二开关电源ic4实时供电,第二开关电源ic4输出dc48v正负极与油泵电机控制器ic25电源输入端相连。防爆运输机器人上电后,视觉主机ic10 通过高速can网络先将指令发给多通信口智能逻辑控制器ic8,然后由多通信口智能逻辑控制器ic8通过can网络发送给智能逻辑控制器ic23,从而下发控制指令,智能逻辑器ic23通过油泵电机控制器ic25控制油泵电机ic30工作、制动解除电磁阀ic28得电工作、水泵电机ic35得电工作、风扇电机ic33得电工作,同时转向电机ic39和ic40进入工作状态。视觉处理主机ic10通过外部传感终端中的深度相机、激光雷达等信息感知防爆运输机器人周围运行环境,以及获取防爆运输机器人行驶状态信息,通过智能算法得出最优路径规划,同时在对车辆运行环境感知和识别后,采用制动、超车与并线等控制算法,通过can 通信将控制命令传输至多通信口智能控制器ic8进而实现防爆运输机器人的直行、转弯、自主避障、超车、会车、停车。多通信口智能控制器ic8得到视觉处理主机ic10命令后将控制信号传输至行走电机控制器ic1,行走电机控制器ic1将这一信号处理后控制行走电机ic26的行走旋转方向,和转向电机ic39、ic40转向角度、启停。多通信口智能控制器ic8经过智能算法得出防爆运输机器人的加速曲线,进行分析处理计算后输出加速信号,该信号传输至行走电机控制器ic1,实现电机的调速,从而控制防爆运输机器人的行走速度。防爆运输机器人在行走过程中如需要紧急停车,人为拍下急停ic27后,该信号传输至智能逻辑控制器ic23,控制解制动电磁阀ic28闭锁,从而使防爆运输机器人紧急制动,将该急停拔出后方可正常行走。运输机器人在行走过程中如遇到瓦斯超标、漏电等信号均可由综合保护装置通过can通信传输给多通信口智能控制器ic8,其与智能逻辑控制器ic23通信,使其输出跳闸信号,实现运输机器人的减速、运行停止,跳闸断电。当大容量蓄电池电压低于某一值时,或者遇到故障报警时,该信息通过can通信会传输至智能逻辑控制器ic8,智能逻辑控制器输出报警信号,如果达到提醒二级报警,防爆运输机器人停止运行。无线通信定位模块、交换机、直觉主机、四个视觉装置显示以太组网。无线定位模块将实时位置信息传输至集控中心。移动通信模块ic7可以将防爆运输机器人的实时状态参数信息发送至集控中心。基于上述过程,本发明所述的一种井下防爆运输机器人多智能体控制装置采用全新结构,合理的控制的控制逻辑,可实现煤矿井下综采、综掘工作面无轨运输系统的智能化、少人化目标,达到煤矿智能开采的目的。
32.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。