技术特征:
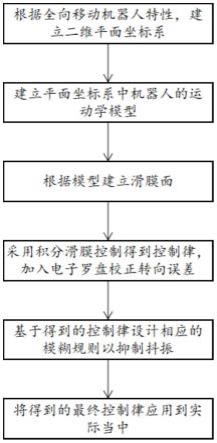
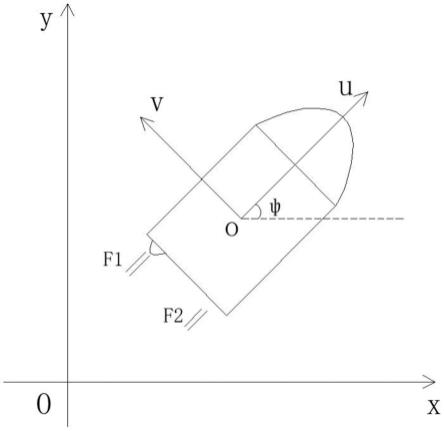
1.一种基于模糊滑模控制的全向移动机器人轨迹跟踪方法,其特征是,包括有以下步骤:s1、根据全向移动机器人特性,建立二维平面坐标系,选取机器人的几何中心建立跟踪位置坐标系,建立平面绝对坐标系xoy,跟踪坐标系x
t
o
t
y
t
,o
t
位于移动机器人的几何中心;建立全向移动机器人的运动学模型:式中,r为轮子半径;ω
i
(i=1,2,
…
4)为各轮子的角速度;l,b分别为轮子轮心到坐标系x
t
o
t
y
t
纵轴和横轴的间距;v
x
,v
y
为机器人的x轴,y轴的平移速率;ω为机器人旋转的转速;θ为机器人与xoy坐标系x轴的夹角;s2、假定绝对坐标系的初始位姿为c=[x,y,θ]
t
,期望位姿g=[x
g
,y
g
,θ
g
]
t
,全向移动机器人线速度与角速度在绝对坐标系下的映射关系为拆解后微分得到:拆解后微分得到:拆解后微分得到:给出机器人运动的二维平面上规划的期望位姿,假定全向移动机器人的参考位姿p
c
=[x
g
,y
g
,θ
g
]
t
,得到跟踪位姿误差量p
e
,参考速率q
c
=[v
g
,ω
g
]
t
,全向移动机器人系统输出为当前速率q
t
=[v
t
,ω
t
]
t
,得到状态方程建立滑模面:式中,θ
e
为航向角误差;x
e
,y
e
是x
t
,y
t
轴向误差;ω
e
为机器人转动的角速度;v
g
为速度指令;ω
g
为角速度指令;ω
t
为期望位姿的机器人转速;v
t
为期望位姿机器人的速率;s3、采用积分滑模控制方法基于滑模面设计系统状态得到控制律;s4、使用电子罗盘对转向过程中产生的角度偏差进行校正;s5、设计连续函数及模糊控制器,抑制控制中的抖振;s6、得到最终控制律,进行实际应用。2.根据权利要求1所述的基于模糊滑模控制的全向移动机器人轨迹跟踪方法,其特征是,步骤s3具体为:设计基于sigmoid饱和函数的滑模切换函数:
求导得:令得到等效控制律为3.根据权利要求2所述的基于模糊滑模控制的全向移动机器人轨迹跟踪方法,其特征是,对切换控制的相关增益系数ε
i
,采取积分的方法进行估计:其中,ζ
i
>0为调整系数,则其中,为正对角阵调整系数。4.根据权利要求3所述的基于模糊滑模控制的全向移动机器人轨迹跟踪方法,其特征是,步骤s4具体为:电子罗盘标准的转换计算式如下:x
r
=x cosα y sinαsinβ-z cosβsinαy
r
=x cosβ z sinβ式中,x
r
和y
r
为要转换到水平位置的值,x、y、z为三个方向的矢量值,α为俯仰角,β为侧倾角。5.根据权利要求4所述的基于模糊滑模控制的全向移动机器人轨迹跟踪方法,其特征是,步骤s5具体为:用连续函数取代符号函数的切换控制削弱抖振和外界扰动的影响:
式中:k1k2ε1ε2都是大于0的数,δ1δ2是趋于0的正小数,得到积分滑模轨迹跟踪控制律为:u=u
″
ep
u
″
saw
;设计2个模糊控制器分别对δk1,x1及δk2,x2进行调节以减弱抖振,选择滑模切换函数与其对时间的倒数的乘积作为模糊系统的输入,模糊控制器的输出则是切换控制的相关估计参数δk1,x1及δk2,x2的值。6.根据权利要求5所述的基于模糊滑模控制的全向移动机器人轨迹跟踪方法,其特征是:选择论域为[-1,1]的模糊控制器1作为输入,选取切换控制中论域分别为[-0.1,0.1]和[-2,2]的参数δk1为控制输出系统的输入输出,模糊集合定义如下:δk1为控制输出系统的输入输出,模糊集合定义如下:δk1={nb,nm,ms,nl,zo,pl,ps,pm,pb}其中,nb、nm、ns、nl、zo依次表示为“负大”、“负较大”、“负中”、“负小”、“零”;pl、ps、pm、pb依次表示为“正小”、“正中”、“正较大”、“正大”;建立模糊控制规则表,使用合成推理法得到相关量之间的模糊关系,推导出模糊决策,采取“重心法”进行反模糊化得到输出值,得到最终的模糊滑模控制律:
技术总结
本发明公开了一种基于模糊滑模控制的全向移动机器人轨迹跟踪方法,解决了现有方法都有其局限性,不能适用于所有的控制系统的问题,其技术方案要点是包括步骤S1建立二维平面坐标系,得到运动学模型;S2给出机器人运动的二维平面上规划的期望位姿,得到跟踪位姿误差,建立滑模面;S3采用积分滑模控制方法基于滑模面设计系统状态得到控制律;S4使用电子罗盘对转向过程中产生的角度偏差进行校正;S5设计连续函数及模糊控制器,抑制控制中的抖振;S6得到最终控制率并实际应用,本发明的一种基于模糊滑模控制的全向移动机器人轨迹跟踪方法,能减弱系统抖振,能快速响应、具有强鲁棒性能,提高收敛速度,具有较高的控制精度。具有较高的控制精度。具有较高的控制精度。
技术研发人员:丁瑞澳 计春雷 曾祥绪
受保护的技术使用者:上海电机学院
技术研发日:2022.06.23
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。