1.本发明涉及电气阀门定位器领域,尤其是一种基于现场总线的智能多回路电气阀门定位系统。
背景技术:
2.近年来,随着工业生产和科学技术的发展,对智能化的电气阀门定位器的需求越来越多,尤其是针对传统的机械式定位器的升级改造提出了新的需求,即对其智能化水平要求越来越高。传统的机械式定位器不带微型处理器,不具备智能化条件,不能实现相关的智能运算。与传统的机械式定位器相比,智能多回路电气阀门定位器具有结构灵活、配置快速、使用便捷、模块化、功能强、可扩展、可升级等独特的优点,已经成为目前智能电气阀门定位器的发展方向。但是,智能定位器的高昂价格也限制了其应用的范围。
技术实现要素:
3.本发明目的在于提供一种实现多回路电气阀门定位的智能化、模块化和网络化控制的基于现场总线的智能多回路电气阀门定位系统。
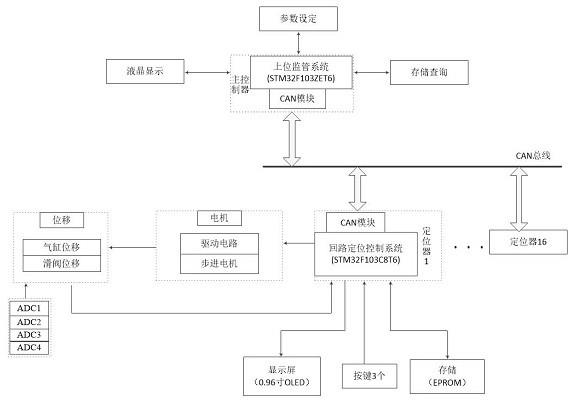
4.为实现上述目的,采用了以下技术方案:本发明所述系统由上位监管系统和16路回路定位控制系统组成;所述上位监管系统包括stm32嵌入式系统和触摸屏;stm32嵌入式系统采用模块化设计,包括嵌入式核心板、通信模块、电源模块、ad采集模块、sd卡记录模块;通信模块、电源模块、ad采集模块、sd卡记录模块分别与嵌入式核心板的信号输入端或输出端相连组成stm32嵌入式系统;stm32嵌入式系统与触摸屏通过rs232串口总线进行通信连接;所述上位监管系统采集气源压力等计划数据采集点的实时数据,将数据按照通信协议发送给触摸屏,统计信息、系统状态相关数据,保存到sd卡记录模块中;所述16路回路定位控制系统包括嵌入式核心板、can通信模块、电源模块、ad采集模块、输入输出模块、电机驱动模块、sd卡记录模块、4-20ma电流输出模块、oled模块;上位监管系统与16路回路定位控制系统通过can总线连接,进行数据的实时通讯和传输。
5.进一步地,所述16路回路定位控制系统采用滑阀加步进电机的控制方式,通过步进电机带动丝杠螺母改变滑阀的位置来控制气缸进气量的大小,控制气缸前后运动。
6.进一步地,所述16路回路定位控制系统配有按键以及用于显示特定数据的小显示屏,以及可插sd卡储存信息的功能;16回路定位控制系统的按键可用于气缸的手动整定模式。
7.进一步地,所述上位监管系统的stm32嵌入式系统的嵌入式核心板是以stm32f103ze为主控芯片,配合电源电路、晶振电路、复位电路以及程序烧录电路组成的嵌入式arm系统核心板。
8.进一步地,所述上位监管系统的电源模块采用24v电源进行供电,通过dc24v转dc5v降压稳压电路为max232接口芯片供电,再通过dc5v转dc3.3v降压稳压电路为stm32嵌入式核心处理器供电。
9.进一步地,所述16路回路定位控制系统的嵌入式核心板是以stm32f103c8t6为主控芯片,配合电源电路,晶振电路,复位电路以及程序烧录电路组成的嵌入式arm系统核心板。
10.进一步地,所述16路回路定位控制系统的电源模块采用5v电源进行供电,通过dc5v转dc3.3v降压稳压电路为stm32嵌入式核心处理器供电。
11.进一步地,所述16路回路定位控制系统的输入输出模块由ad模块、传感器、驱动模块、步进电机、通信模块设计、数字量输入输出模块组成。
12.与现有技术相比,本发明系统具有如下优点:1、智能多回路电气阀门定位器既要实现复杂的功能,又要操作简单,其智能化、模块化和网络化的控制结构是发展的趋势。基于现场总线的智能多回路电气阀门定位系统是由多个单回路智能电气阀门定位器与多回路电气阀门定位监控器组成,通信功能强,智能化水平高,可实现基于现场总线的智能多回路电气阀门定位操作和管理,使现场参数整定简单化和控制品质完善化,并可以通过基于现场总线网络架构模式的网络化设计,构成现场总线式主从网络控制系统,使得定位器的通信距离更远,速度更快,数据吞吐量更大,更加安全可靠。基于现场总线的智能多回路电气阀门定位系统具有低价格、高性能、多功能、操作方便等优点,适用于小批量、特殊化、多品种电气阀门控制现场的需要。
13.2、参数巡回显示,参数自整定并显示,曲线显示,灵敏度设置,参数加锁,低功耗,故障报警,三断保护,恢复出厂设置等功能,可实现16路的电气阀门定位器控制回路的分布式定位控制。
附图说明
14.图1是本发明的系统结构框图。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
16.需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
17.本发明使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术
中常规的连接方式,在此不再详述。
18.如图1所示,本发明所述系统由上位监管系统和16路回路定位控制系统组成;所述上位监管系统包括stm32嵌入式系统和触摸屏;stm32嵌入式系统采用模块化设计,包括嵌入式核心板、通信模块、电源模块、ad采集模块、sd卡记录模块;通信模块、电源模块、ad采集模块、sd卡记录模块分别与嵌入式核心板的信号输入端或输出端相连组成stm32嵌入式系统;stm32嵌入式系统与触摸屏通过rs232串口总线进行通信连接;所述上位监管系统采集气源压力等计划数据采集点的实时数据,将数据按照通信协议发送给触摸屏,统计信息、系统状态相关数据,保存到sd卡记录模块中;所述上位监管系统的stm32嵌入式系统的嵌入式核心板是以stm32f103ze为主控芯片,配合电源电路、晶振电路、复位电路以及程序烧录电路组成的嵌入式arm系统核心板。
19.核心处理器自带电源稳压芯片,在滤波、稳压中起重要作用,保证了电源的可靠性。核心处理器引出了常用必要的i/o引脚,方便与外设进行连接;引出了swd仿真调试下载接口,可用调试仿真下载器下载,方便简单。程序可用keil编程软件进行开发,编译好的程序可以通过swd方式或者isp方式下载。
20.所述上位监管系统的触摸屏采用的是广州大彩光电科技有限公司推出的工业串口屏,该串口屏拥有按钮、文本、下拉菜单、进度条、滑块、仪表、动画、二维码、数据记录、曲线、圆形进度条等各种组态控件。stm32嵌入式系统只需发送相应串口指令就可以实现相应功能。通过visual tft软件实现串口触摸屏的开发与调试,内置的“虚拟串口屏”可进行上位监管系统显示界面的仿真调试。
21.产品参数如下:型号:dc10600f101_2111_0c核心处理器:32 位大彩深度定制专用处理器协议类型:大彩组态指令集尺寸:10.1寸分辨率:1024*600存储空间:128mbit电压:5-36v(误差
±
0.2v)通讯接口:rs232/ttl配套上位机软件:visual tft工作温度:-20~ 70℃所述上位监管系统的通信模块,核心处理器内部的串行口具有通信的功能,该串行口可以作为通信接口实现与触摸屏的串行通信。触摸屏的输入输出为rs-232电平,而核心处理器串行口的输入输出均为ttl 电平。
22.由于ttl 电平和rs-232电平互不兼容, 所以两者通信时, 必须进行电平转换。可以通过 max232芯片进行 rs232/ttl 电平转换。
23.所述上位监管系统的电源模块采用24v电源进行供电,通过dc24v转dc5v降压稳压电路为max232接口芯片供电,再通过dc5v转dc3.3v降压稳压电路为stm32嵌入式核心处理器供电。
24.所述16路回路定位控制系统包括嵌入式核心板、can通信模块、电源模块、ad采集
模块、输入输出模块、电机驱动模块、sd卡记录模块、4-20ma电流输出模块、oled模块。
25.所述16路回路定位控制系统的嵌入式核心板是以stm32f103c8t6为主控芯片,配合电源电路,晶振电路,复位电路以及程序烧录电路组成的嵌入式arm系统核心板。
26.核心处理器引出了常用必要的i/o引脚,方便与外设进行连接;引出了swd仿真调试下载接口,可用调试仿真下载器下载,方便简单。程序可用keil编程软件进行开发,编译好的程序可以通过swd方式或者isp方式下载。
27.所述16路回路定位控制系统的can通信模块使用sn65hvd230 can收发器,该器件适用于较高通讯速率、良好抗干扰能力和高可靠性can总线的串行通信。
28.所述16路回路定位控制系统的电源模块采用5v电源进行供电,通过dc5v转dc3.3v降压稳压电路为stm32嵌入式核心处理器供电。
29.所述16路回路定位控制系统的ad采集模块,传感器输出的电流信号需通过精密的测量电阻变为电压信号,然后通过核心处理器内置的a/d转换器进行模数转换。
30.所述16路回路定位控制系统的输入输出模块主要包括ad模块,传感器,驱动模块,步进电机,通信模块设计,数字量输入输出模块。
31.所述16路回路定位控制系统的电机驱动模块,步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
32.所述16路回路定位控制系统的4-20ma电流输出模块将两单片机的两个引脚连接到信号发生模块的两相,地共接,通过输出带有相位差的脉冲即可实现对输出电流值的调节,其调节精度为0.1ma,输出值可显示。
33.所述16路回路定位控制系统的oled模块采用一款超小尺寸的oled模块,显示尺寸为0.96寸,分辨率高,可多种接口方式,不需要高压,在3.3v电压下就可以直接进行工作。
34.所述16路回路定位控制系统配有按键以及用于显示特定数据的小显示屏,以及可插sd卡储存信息的功能;16回路定位控制系统的按键可用于气缸的手动整定模式。
35.所述16路回路定位控制系统采用滑阀加步进电机的控制方式,通过步进电机带动丝杠螺母改变滑阀的位置来控制气缸进气量的大小,控制气缸前后运动。
36.上位监管系统与16路回路定位控制系统通过can总线连接,进行数据的实时通讯和传输。
37.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。