1.本发明属于水下对接技术领域,具体涉及一组可变结构的水下航行器动态对接回收装置。
背景技术:
2.我国拥有广阔的海洋面积,同时也拥有丰富的海洋资源,随着人类社会对自然资源的需求日益增长,开发位置的海洋领域成为各国科技力量投入的重点。由于具有灵活多变的工作方式、体积小巧且装载多种探测仪器,自主式水下航行器被广泛应用到多种实践中。水下航行器采用锂电池能源作为能量来源,如果不能及时补充,就会造成航行器内部设备损坏、数据报错、甚至丢失,从而造成无法挽回的损失。因此实现对自主水下航行器的高质量回收是提升其工程作业能力的关键技术。通常,自主式水下航行器有两种回收方式:第一种是在水面上用母船吊起auv进行回收,该作业方式适用于大型水下航行器的回收,但工作过程易受风浪影响;第二种是采用水下对接平台进行对接回收作业,虽然可以避免风浪的影响,但活动范围受限。近50年来,国内外研究机构设计出不同的水下航行器对接装置,适用于不同的工作环境,具备不同的功能特点。按照对接装置结构形式以及对接过程技术特点,将对接方式分为4类:1、捕获式对接:需要auv通过位于其头部的捕获装置来捕获对接装置上的绳索、直杆等导向机构,然后沿导向机构运动以完成对接过程,但该对接方式的锁紧结构接触面小,产生的固紧力也小,可能会导致对接成功后与捕获装置脱离;2、导向式对接:在对接装置中auv的入口处加入导向结构,执行对接任务时,需要将对接装置放置在特定位置上,auv通过导向罩以正确的姿态进入对接装置,完成对接;但该对接装置为一个独立渐缩型固定结构,体积庞大,更适用于auv与对接装置的动——静对接情况,对接任务繁琐;3、水下平台对接:以水中平台为对接目标的坐落式对接,结构简单,机械部件少,不需要经常维修,但对接时的操作精度必须较高,否则成功率会比较低;4、框架式结构对接:将auv的回收舱设计为长方体结构,回收时auv进入该结构内部并紧锁,然后母船将auv与回收舱整体打捞上来,但易受海洋环境的影响,对精度要求较高,同时还需要大量的操作人员的参与,因此成功率不高。
技术实现要素:
3.要解决的技术问题:
4.为了避免现有技术的不足之处,本发明提供一组可变结构的水下航行器动态对接回收装置,通过该装置可以实现两个水下航行器之间的动态对接。考虑到对接过程中的定位问题,本发明在尾部对接装置和头部对接装置内部都设计了摄像头和导引灯,当航行器收到对接命令时,两航行器呈相对前后的运动状态,内置摄像头和导引灯进入工作状态,对接航行器可利用摄像头参照被对接航行器的导引灯进行自主定位,同理,被对接航行器也可以利用摄像头参照对接航行器的导引灯及时修正自身运动状态,从而实现动态双向定位,提高对接过程中的定位精度;同时,考虑到对接任务的高稳定性需求,本发明设计了两
层保障,一是在尾部对接装置中安装电磁铁,利用电磁铁的强磁力吸附头部对接装置,二是设计了对接瓣,在对接过程中尾部对接装置的对接瓣与头部对接装置的对应平面紧密贴合,并且通过紧锁结构,可以有效防止对接对接航行器脱落。
5.本发明的技术方案是:一组可变结构的水下航行器动态对接回收装置,包括头部对接装置和尾部对接装置,两者分别安装于水下航行器的头部和尾部,用于航行器之间的动态首尾对接回收;
6.所述尾部对接装置包括尾部对接套件、对接瓣、开合机构和固定装置;所述尾部对接套件的底端与水下航行器的尾部固定连接,顶端安装有对接瓣、开合机构和固定装置;通过开合机构控制对接瓣的开合动作,实现与头部对接装置的对接;通过固定装置实现对接后的固定连接;
7.所述头部对接装置底端与水下航行器的头部固定连接,顶端是与所述对接瓣配合安装的对接结构。
8.本发明的进一步技术方案是:所述尾部对接套件为一端开口的套筒结构,其开口端套装于水下航行器的尾部;其封闭端的外缘沿周向铰接有多个对接瓣,中部安装有开合机构和固定装置。
9.本发明的进一步技术方案是:所述对接瓣的数量为6个,沿周向均布。
10.本发明的进一步技术方案是:所述开合机构包括动力传动机构、中心转盘和连杆,所述中心转盘同轴转动安装于尾部对接套件的顶端端面;多个所述连杆沿周向均布,一端与中心转盘的外缘铰接,另一端分别与多个对接瓣的内侧铰接;通过动力传动机构驱动中心转盘旋转,同时带动多个连杆运动,实现多个对接瓣的开合动态效果。
11.本发明的进一步技术方案是:所述动力传动机构包括电机、大齿轮、小齿轮和传动轴;所述传动轴通过轴承同轴安装于尾部对接套件顶端,其一端与中心转盘同轴固定连接,另一端与大齿轮固定连接;所述小齿轮与大齿轮啮合,安装于电机的输出轴上;通过电机驱动小齿轮转动,同时依次带动大齿轮、传动轴、中心转盘旋转。
12.本发明的进一步技术方案是:所述连杆包括弧形杆和短连杆,所述弧形杆一端与中心转盘的外缘处铰接,另一端通过十字轴与短连杆的一端连接,与短连杆形成“万向轴”的结构;所述短连杆的另一端通过与对接瓣的内侧铰接。
13.本发明的进一步技术方案是:所述固定装置包括对接盘和电磁铁安装盘,所述对接盘和电磁铁安装盘同轴安装于中心转盘正上方,用于两个水下接航行器的对接固定。
14.本发明的进一步技术方案是:所述对接盘上安装有摄像头和导引灯,通过摄像头给被对接航行器提供对接航行器的相关信息,通过导引灯给对接航行器提供光学信息。
15.本发明的进一步技术方案是:所述头部对接装置是与尾部对接装置相互配合的回转体,其周面上沿周向均布有多个安装平面,用于与多个对接瓣一一配合安装时的引导;所述安装平面上设置有凹槽,与对接瓣内侧的凸起相对应,通过凹凸结构配合完成对接瓣和头部对接装置贴合后的锁紧固定;头部对接装置的顶部是与所述固定装置相对于的对接结构,对接完成后与固定装置对接为一体结构。
16.本发明的进一步技术方案是:所述头部对接装置上安装有摄像头和导引灯,当头部对接装置顶端进入尾部对接装置时,通过所述导引灯和摄像头进行主动定位,完成水下航行器之间的动态对接。
17.工作过程:不执行对接任务时,对接瓣呈收拢闭合状态,外形类似六棱锥结构。
18.当两水下航行器开始对接时,对接瓣打开呈“花瓣”状,等待头部对接装置进入;头部对接装置进入后,对接瓣开始收拢,逐渐将头部对接装置引导到正确对接位置。所述对接瓣上有与头部对接装置平面上凹槽相对应的凸部,在对接瓣与头部对接装置平面逐渐贴合过程中,凸部逐渐进入凹槽直至完全配合,从而实现紧锁。完成对接后,对接瓣以及头部对接装置形成的整体与航行器的直径相同,对接整体呈现流线型。
19.有益效果
20.本发明的有益效果在于:
21.1、对接装置可以利用自身的机械结构来实现水下航行器的自主动态对接,无需在水下设置体积庞大的对接平台或是使用专门制造的回收装置,相较于现有技术中适用于静态对接情况、动——静对接情况下的捕获式对接、导向式对接、水下平台式对接以及框架式结构对接装置,该对接装置的动——动对接方法具有更好的灵活性、简单性、便捷性。
22.2、本发明的对接装置在对接和释放时主动打开,对接完成后形成的整体水下阻力小;分离后可以自主关闭形成流线型结构,小巧灵活。
23.3、对接装置可以利用内置摄像头和导引灯主动进行对接定位,并通过尾部对接装置的对接瓣主动进行位置矫正,从而实现对接过程中的精准定位。由于水下环境复杂,航行器运动容易受到各种因素的干扰,对接航行器无法准确跟踪被对接航行器的运动轨迹,动态对接就会受到影响,而内置摄像头和导引灯则可以有效避免这类问题。具备双向定位功能的对接装置,可以在水下环境恶劣的情况下,通过摄像头和导引灯,进行自主定位以及位置误差修正,从而准确实现对接。不仅如此,当航行器的头部对接装置在进入尾部对接装置的过程中产生位置偏移时,尾部对接瓣可以通过机械结构限制头部对接装置的运动,自主调整头部对接装置的位置,使其稳定在对接瓣打开时的范围内,起到限位作用,从而提高对接时的定位精度。
24.4、对接装置结构可变,在不需要对接回收时,对接瓣收拢,尾部对接装置可变为类似六棱锥形,整个水下航行器外形为流线型。在进行对接回收时,对接瓣打开,尾部对接装置呈“花瓣”状,引导两个对接航行器进行正确对接。而且,当航行器之间完成动态对接后,两航行器通过对接装置依然组合为一个流线型的整体,可以有效减小航行器水下运动时的阻力。所述对接装置的对接瓣还具有限位作用,可以克服航行器在水下运动时因环境因素而引起的位置漂移;当两航行器开始对接时,被对接航行器的尾部对接装置的对接瓣打开,对接航行器的头部对接装置进入被对接航行器的尾部对接装置,此时,对接瓣可以将对接航行器的运动限制在一定位置范围内,主动进行位置矫正,从而完成动态对接,提高对接时的定位精度。
25.5、对接装置不局限于上述效果,后期还可以在功能上进行拓展,例如用于航行器之间的充电、完成组合导航任务等。
附图说明
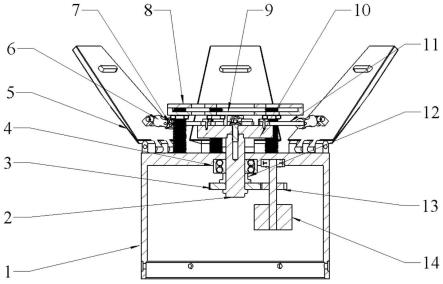
26.图1为本发明的尾部对接装置的结构示意图;
27.图2为本发明的头部对接装置的结构示意图;
28.图3为本发明的尾部对接装置的轴测示意图;
29.图4为本发明的头部对接装置的轴测示意图;
30.图5为本发明尾部对接装置的传动机构的结构图;
31.图6为本发明的尾部对接装置的俯视示意图;
32.图7为本发明的十字轴、弧形杆、短连杆的结构示意图;
33.图8为航行器对接前的状态示意图;
34.图9为航行器对接后的状态示意图。
35.附图标记说明:1-尾部对接套件,2-转动轴,3-传动齿轮组的大齿轮,4-轴承,5-对接瓣,6-短连杆,7-十字轴,8-对接盘,9-电磁铁安装盘,10-中心转盘,11-弧形杆,12-轴承套,13-传动齿轮组的小齿轮,14-电机,15-头部对接装置,16-对接水下自主航行器,17-被对接水下自主航行器。
具体实施方式
36.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
37.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
38.参照图1至图4,本发明提供了一组可变结构的水下航行器动态对接回收装置,由两部分组成,包括尾部对接装置和头部对接装置,相互组合连接后可以完成水下航行器的动态对接工作。对接装置均进行水密处理,外壳使用高强度耐压材料,可以在水下工作。两个航行器动态对接过程的实现设计有两层保障,一是当航行器对接时,尾部对接装置的电磁铁安装盘9内的电磁铁与头部对接装置15进行强磁吸合;二是尾部对接装置的对接瓣5与头部对接装置15的对应平面紧密贴合,从而保障两航行器动态对接的稳定性,提高对接成功率。
39.参照图1、3所示,所述尾部对接装置包括尾部对接套件1、对接瓣5、开合机构和固定装置;所述尾部对接套件1一端开口的套筒结构,其开口端套装于水下航行器的尾部;其封闭端的外缘沿周向铰接有6个对接瓣5,中部安装有开合机构和固定装置。通过开合机构控制对接瓣5的开合动作,实现与头部对接装置的对接。所述固定装置包括对接盘8和电磁铁安装盘9,所述对接盘8和电磁铁安装盘9同轴安装于中心转盘10正上方,用于两个水下接航行器的对接固定。所述尾部对接装置中的对接套件1中心安装传动轴以及预留安装对接盘和电磁铁安装盘时的螺孔。所述尾部对接装置中对接盘8上预留了摄像头和导引灯安装孔,可以安装1个摄像头和4个均匀分布的导引灯,摄像头可以给被对接航行器提供对接航行器的相关信息,导引灯用于给对接航行器提供光学信息。
40.参照图5、6所示,所述开合机构包括动力传动机构、中心转盘10和连杆,所述中心转盘同轴转动安装于尾部对接套件的顶端端面;多个所述连杆沿周向均布,一端与中心转盘的外缘铰接,另一端分别与多个对接瓣的内侧铰接;通过动力传动机构驱动中心转盘旋转,同时带动多个连杆运动,实现多个对接瓣的开合动态效果。所述动力传动机构包括电机
14、大齿轮3、小齿轮13和传动轴2;所述传动轴2通过轴承同轴安装于尾部对接套件1顶端,其一端与中心转盘10同轴固定连接,另一端与大齿轮3固定连接;所述小齿轮13与大齿轮3啮合,安装于电机14的输出轴上;通过电机14驱动小齿轮13转动,同时依次带动大齿轮3、传动轴2、中心转盘10旋转。参照图7所示,所述连杆包括弧形杆11和短连杆6,所述弧形杆11一端与中心转盘10的外缘处铰接,另一端通过十字轴7与短连杆6的一端连接,与短连杆6形成“万向轴”的结构;所述短连杆6的另一端通过与对接瓣5的内侧铰接。
41.所述头部对接装置13是与尾部对接装置相互配合的回转体,其周面上沿周向均布有多个安装平面,用于与6个对接瓣5一一配合安装时的引导;所述安装平面上设置有直线型凹槽,与对接瓣内侧的直线型凸起相对应,通过凹凸结构配合完成对接瓣5和头部对接装置15贴合后的锁紧固定;头部对接装置15的顶部是与所述固定装置相对于的对接结构,对接完成后与固定装置对接为一体结构。
42.参照图1、图3、图5、图6、图7,本实施例尾部对接装置的对接瓣5开合的具体实现过程如下:步进电机14带动齿轮组中的小齿轮13转动,小齿轮13与齿轮组的大齿轮3在结构上相互啮合,从而带动大齿轮3反向转动(此处反向是指与小齿轮13的转动方向相反),大齿轮13通过轴承4套接在转动轴2上,并带动转动轴2同向转动(此处同向是指与大齿轮3的转动方向相同),从而实现中心转盘10的转动,由于弧形杆11安装在中心转盘10上,短连杆6安装在对接瓣5上,弧形杆11与短连杆6通过十字轴7相连接,形成类似“万向节”的机械结构,从而实现中心转盘10的转动带动对接瓣5的开合。
43.参照图2、图4,本实施例所述的头部对接装置为一个具有与对接瓣5相贴合的六个平面的配套对接装置。头部对接装置15的内部中心内置了一个摄像头,边缘均匀内置了4个导引灯,主要用于跟踪被对接航行器的运动轨迹以及完成对接过程中的准确定位,提高定位精度和对接成功率。
44.参照图8、图9所示,为水下航行器对接前和对接后的状态图。动态对接过程如下:对接前,两航行器保持各自的运动状态不发生变化,分别执行各自的任务,被对接航行器17的对接瓣5闭合;当两航行器收到对接命令后,两航行器开始发生位置变换,向相对前后的位置关系转变,被对接航行器的尾部对接装置和对接航行器的头部对接装置里15内置的摄像头和导引灯此时处于工作状态,对接航行器16通过摄像头,追踪被对接航行器17的位置,并通过被对接航行器尾部对接装置的导引灯逐渐跟踪被对接航行器17的运动轨迹,与此同时,被对接航行器17的对接瓣5收到对接命令后自动打开,对接航行器16逐渐向被对接航行器17靠近;当被对接航行器17的对接瓣5完全打开后,即两航行器进入准备对接状态,对接航行器16收到开始对接命令,逐渐进入被对接航行器17的尾部对接装置,在利用内置摄像头和导引灯运动到指定位置后,尾部对接装置的电磁铁安装盘9内的电磁铁与头部对接装置15吸合,对接瓣5开始收拢,并逐渐与头部对接装置上的相应位置平面贴合,从而完成对接,然后呈整体稳定状态继续运动。
45.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。