1.本实用新型涉及复合材料预浸料生产设备领域,详细地讲是一种复合材料收放卷装置。
背景技术:
2.众所周知,复合材料(预浸料)的制备过程中需要使用的收卷和放卷功能,在复杂的设备中因设备功能调整需要在同一工位在不同功能下实现收卷或放卷功能,同时在不同放卷物料下对放卷张力同样有不同需求,设备因空间等因素无法安装三套收卷、放卷系统。
技术实现要素:
3.为了克服现有技术的不足,本实用新型提供一种复合材料收放卷装置,既可以用于低张力放卷也可以用于大张力放卷装置,同时可以实现收卷功能。
4.本实用新型解决其技术问题所采用的技术方案是:一种复合材料收放卷装置,设有机架,其特征是,机架上安装的两个安全卡盘,两个安全卡盘之间安装有气涨轴,气涨轴上承载塑料膜卷,塑料膜卷下方安装有测距传感器,塑料膜卷一侧安装有导辊,导辊上设有张力传感器,安全卡盘的主动端另一侧安装有第一联轴器,第一联轴器另一端与驱动轴固定,驱动轴在轴承的固定下安装在机架上,驱动轴上安装有制动磁粉阻尼器,驱动轴另一端安装有第二联轴器,第二联轴器与驱动磁粉阻尼器的输出端相连,驱动磁粉阻尼器的另一端安装有第三联轴器,联轴器固定在刹车电机输出轴上。
5.本实用新型的有益效果是,既可以用于收卷,也可以进行大张力放卷和低张力放卷,可实现主动放卷、被动放卷、收卷功能一体化。
附图说明
6.下面结合附图和实施例对本实用新型进一步说明。
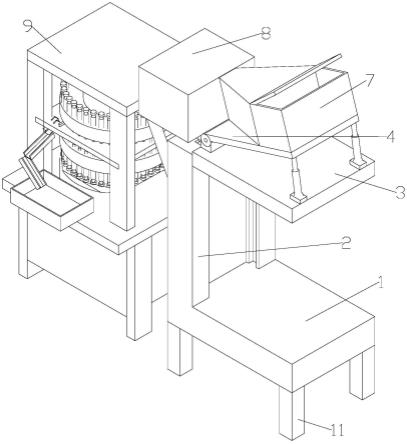
7.图1本实用新型的结构示意图。
8.图2是图1的左视图。
9.图中1.机架,2.安全卡盘,3.气涨轴,4.塑料膜卷,5.测距传感器,6.第一联轴器,7.驱动轴,8.制动磁粉阻尼器,9.轴承,10.驱动磁粉阻尼器,11.刹车电机,12.导辊,13.第二联轴器,14.第三联轴器。
具体实施方式
10.在图中,本实用新型设有机架,机架1上安装的两个安全卡盘2,两个安全卡盘2之间安装有气涨轴3,气涨轴3上承载塑料膜卷4,塑料膜卷4下方安装有测距传感器5,测距传感器5用于检测塑料膜卷4直径,塑料膜卷4一侧的运行路径上安装有导辊12,导辊12上设有张力传感器,导辊12可实时检测塑料膜4放卷张力,安全卡盘2的主动端另一侧安装有第一联轴器6,第一联轴器6另一端与驱动轴7固定,驱动轴7在轴承9的固定下安装在机架1上,驱
动轴7上安装有制动磁粉阻尼器8,驱动轴7另一端安装有第二联轴器13,第二联轴器13与驱动磁粉阻尼器10的输出端相连,驱动磁粉阻尼器10的另一端(输入端)安装有第三联轴器14,联轴器14固定在刹车电机11输出轴上。
11.刹车电机11、制动磁粉阻尼器8、驱动磁粉阻尼器10与plc控制系统连接,张力传感器检测值传输给plc控制系统,plc控制系统控制刹车电机11、制动磁粉阻尼器8、驱动磁粉阻尼器10。
12.本发明的具体实施方法是:
13.塑料膜卷4与气涨轴3的旋转阻力矩(包含安全卡盘2、制动磁粉阻尼器8、驱动磁粉阻尼器10、轴承9、第一联轴器6、第二联轴器13、第三联轴器14阻力,不包含制动磁粉阻尼器8、驱动磁粉阻尼器10制动阻力)为:m
阻
,此时塑料膜4半径为:r,塑料膜卷4放卷阻力为m
阻
/r。
14.塑料膜卷4径为最小时,气涨轴3旋转阻力矩为:m阻1,塑料膜半径为:r1。
15.塑料膜卷4径为最大时,气涨轴3旋转阻力矩为:m阻2,塑料膜半径为:r2。(m阻1、m阻2、r1、r2数据可预先检测得知)
16.m阻=m机械 f1
·
μ/r
17.m机械:安全卡盘2、制动磁粉阻尼器8、驱动磁粉阻尼器10、轴承9、第一联轴器6、第二联轴器13、第三联轴器14阻力等机械阻力矩(此值为固定值)
18.f1:塑料膜卷4卷重量(单位n)
19.r:塑料膜卷4半径(单位m)
20.已知塑料膜密度,即f1与r呈线性关系
21.即得m阻/r=m机械/r f1
·
μ/r2
22.即m阻1/r1为塑料膜卷放卷阻力的极限最大值,m阻2/r2,为塑料膜卷放卷阻力的极限小值。
23.低张力主动放卷:
24.设定放卷张力值为f。
25.控制系统判定当前设定放卷张力f>m阻2/r2,控制系统设定制动磁粉阻尼器~8的制动扭矩为m制,m制>f
·
r2-m阻2;当前设定放卷张力f<m阻2/r2,系统不启动制动磁粉阻尼器8。
26.设备全线启动,运行速度v1,控制系统设定驱动磁粉阻尼器10驱动扭矩为m驱动,m驱>m阻2 m制。(m阻总=m阻2 m制)
27.控制系统在测距传感器5的反馈半径计算下,启动刹车电机11放卷功能,并以小于设备运行速度进行放卷工作,放卷速度v2(v2=n
·
2rπ,r为实时半径,n为电机转速),此时因驱动磁粉阻尼器10驱动扭矩大于放卷系统总阻力矩,塑料膜卷4被带动进行放卷工作,因放卷系统放卷速度v2小于设备运行速度v1,所以塑料膜卷4被拉紧直至与导辊12、张力传感器接触,张力传感器检测到信号。
28.plc控制系统在接收到张力传感器信号后,驱动磁粉阻尼器10驱动力矩降低为m驱2,m驱,2=m阻2 m制-f
·
r(r为实时半径),同时将刹车电机11放卷速度提高至v3(v3=n
·
2rπ,r为实时半径,n为电机转速),v3>v1。plc控制系统通过张力传感器检测值控制驱动磁粉阻尼器10驱动力矩;当张力传感器检测值低于设定张力值时,控制系统减小驱动磁粉阻尼器10驱动力矩;当张力传感器检测值高于设定张力值时,plc控制系统增大驱动磁粉阻
尼器10驱动力矩。
29.大张力被动放卷(放卷张力f>>m阻1/r1)(放卷张力值较大时,采用大张力被动放卷功能):
30.设定放卷张力值为f。
31.启动刹车电机11刹车功能。
32.控制系统在测距传感器5的反馈半径计算下,设定m阻总值,m阻总=f
·
r=m阻1 m制 m驱
33.设备全线启动,运行速度v1,塑料膜卷4拉紧与导辊12、张力传感器接触,张力传感器检测到信号。
34.plc控制系统在接收到张力传感器信号后,控制系统通过张力传感器检测值控制驱动磁粉阻尼器10与制动磁粉阻尼器8制动力矩。当张力传感器检测值低于设定张力值时,plc控制系统加大驱动磁粉阻尼器10与制动磁粉阻尼器8制动力矩;当张力传感器检测值高于设定张力值时,控制系统减小驱动磁粉阻尼器10与制动磁粉阻尼器8制动力矩。
35.主动收卷:
36.设定放卷张力值为f(f≤m驱/r2)。
37.启动刹车电机11收卷功能,刹车电机11已v4速度进行收卷(v4=n
·
2rπ,r为实时半径,n为电机转速),v4>v1(v1设备运行速度)。
38.plc控制系统在测距传感器5的反馈半径计算下,设定驱动磁粉阻尼器10驱动力矩为m驱,m驱=f
·
r(r为实时半径)。
39.塑料膜卷4在驱动磁粉阻尼器10驱动下,塑料膜卷4拉紧与导辊12、张力传感器接触,张力传感器检测到信号。
40.plc控制系统在接收到张力传感器信号后,控制系统通过张力传感器检测值控制驱动磁粉阻尼器的驱动力矩。当张力传感器检测值低于设定张力值时,plc控制系统加大驱动磁粉阻尼器10的驱动力矩;当张力传感器检测值高于设定张力值时,控制系统减小驱动磁粉阻尼器的驱动力矩。
41.本发明的主动放卷中,预先启动电机驱动塑料膜卷4以低于设备速度运行目的是减少启动惯量对放卷张力的影响。
42.本发明中被动放卷中,plc控制系统控制驱动磁粉阻尼器10与制动磁粉阻尼器8制动力矩时,可单独启用驱动磁粉阻尼器10或制动磁粉阻尼器8,也可同时启用驱动磁粉阻尼器10与制动磁粉阻尼器8。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。