一种基于openmv机器视觉模块模板识别方法的搬运小车
技术领域
1.本实用新型涉及智能运输技术领域,尤其涉及一种基于openmv机器视觉模块模板识别方法的搬运小车。
背景技术:
2.对于现在openmv模板识别运输领域,搬运小车通常结构较为复杂,并且开发紧凑,模块化程度不高,具有较低的内聚性,较高的耦合性,非常不便于更换各个部分的零部件,而且便于改写对应部分的程序或者代码。
3.本实用新型采用了openmv模板识别的方法,识别精确度高,适应性强,开发简单,反应较快,适应于多种使用场景。
技术实现要素:
4.本实用新型的目的在于提供一种基于openmv机器视觉模块模板识别方法的搬运小车,解决了现有技术中的上述问题。
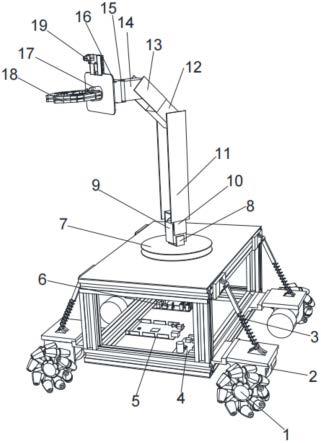
5.为实现上述目的,本实用新型提供如下技术方案:一种基于openmv机器视觉模块模板识别方法的搬运小车,包括机械臂和底盘,所述底盘包括弹簧轴、btn7971b电机驱动器、stm32 f103rct6单片机、arduino mega2560板、舵机控制板、麦克纳姆轮和齿轮减速直流电机,所述机械臂包括机械臂云台、链接部分和机械臂爪部,所述链接部分包括舵机组和连接件,所述机械臂云台通过连接件ⅰ与链接部分的舵机链接,所述机械臂爪部包括openmv机器视觉模块和机械爪,所述机械爪包括连接部和爪部,所述机械爪的连接部与所述链接部分通过连接件
ⅴ
链接。
6.优选的,所述舵机组包括舵机ⅰ、舵机ⅱ、舵机ⅲ和舵机ⅳ,所述舵机ⅰ与所述舵机ⅱ通过连接件ⅱ和连接件ⅲ链接,所述舵机ⅱ与所述舵机ⅲ通过连接件ⅳ链接,所述舵机ⅲ与所述舵机ⅳ通过连接件
ⅴ
链接。
7.优选的,所述连接件ⅰ、所述连接件ⅱ、所述连接件ⅳ和所述连接件
ⅴ
是u形件,所述连接件ⅲ为两块相同的矩形板,其中所述连接件ⅰ、所述连接件ⅱ、所述连接件ⅲ与所述连接件ⅳ的中心对称线共面,并与所述连接件
ⅴ
的中心对称线垂直。
8.优选的,所述机械爪的连接部与所述连接件
ⅴ
链接,舵机转动,并通过螺纹紧固,所述链接部分的舵机组与舵机控制板通过导线连接。
9.优选的,所述openmv机器视觉模块与所述arduino mega2560板通过导线连接,所述 openmv机器视觉模块的发送信号引脚与所述arduino mega2560板的接收信号口通过导线相连,所述openmv机器视觉模块载有训练好的目标检测模型以及各类音频,并通过串口与 arduino mega2560板相互通信。
10.优选的,所述舵机控制板的发射信号引脚与所述arduino mega2560板的接收信号口通过导线相连,所述舵机控制板的接收信号引脚与所述arduino mega2560板的发射信号口通过导线相连,所述stm32 f103rct6单片机与所述arduino mega2560板通过导线连接,
16,舵机ⅰ9与舵机ⅱ12通过连接件ⅱ10和连接件ⅲ11链接,舵机ⅱ12与舵机ⅲ14通过连接件ⅳ13链接,舵机ⅲ14与舵机ⅳ16通过连接件
ⅴ
15链接,连接件ⅰ8、连接件ⅱ10、连接件ⅳ13和连接件
ⅴ
15是u形件,连接件ⅲ11为两块相同的矩形板,其中连接件ⅰ8、连接件ⅱ10、连接件ⅲ11与连接件ⅳ13的中心对称线共面,并与连接件
ⅴ
15的中心对称线垂直;
26.机械爪18的连接部与连接件
ⅴ
15链接,舵机转动,并通过螺纹紧固,链接部分的舵机组与舵机控制板通过导线连接,openmv机器视觉模块19与arduino mega2560板5通过导线连接,openmv机器视觉模块19的发送信号引脚与arduino mega2560板5的接收信号口通过导线相连,openmv机器视觉模块19载有训练好的目标检测模型以及各类音频,并通过串口与arduino mega2560板5相互通信,舵机控制板的发射信号引脚与arduino mega2560板5 的接收信号口通过导线相连,舵机控制板的接收信号引脚与arduino mega2560板5的发射信号口通过导线相连,stm32 f103rct6单片机6与arduino mega2560板5通过导线连接,并通过串口相互通信,stm32 f103rct6单片机6与btn7971b电机驱动器4通过导线连接其编码器,btn7971b电机驱动器4与电源通过导线连接,btn7971b电机驱动器4与齿轮减速直流电机2通过导线连接其编码器,齿轮减速直流电机2与麦克纳姆轮1紧固连接。
27.姿态传感器采用mpu6050六轴传感器,安放于机器人的前胸板上,其scl引脚和sda引脚是连接六轴传感器mcu的ⅱc口,scl引脚接主控制器的pa12口,sda引脚接主控制器的 pa8口;六轴传感器的vcc引脚、gnd引脚分别接主控制器的 5v口、gnd口,超声波传感器共有三个,分别安放于机器人的左右脚外侧及左脚的前端。超声波每个含有四个引脚,分别是trig引脚、echo引脚、vcc引脚、gnd引脚;trig引脚是控制输入端,echo引脚是返回输出端,三个超声波的trig引脚分别和主控制器的pb1口、pb10口、pb12口,三个超声波的echo引脚分别和主控制器的pb0口、pb11口、pb13口相连,三个超声波的vcc引脚、gnd 引脚分别接主控制器的 5v口、gnd口;
28.舵机控制板的发射信号引脚tx与主控制器的接收信号口pa10相连,舵机控制板的接收信号引脚rx与主控制器的发射信号口pa9相连,舵机控制板的vcc引脚、gnd引脚分别连接主控制器的 3.3v口、gnd口,openmv模块板载有训练好的yolov2目标检测模型以及各类音频,并通过串口与主控器相互通信,openmv模块通过fpc排线与k210开发板连接,麦克风的3v3引脚、sck引脚、ws引脚、dat引脚、gnd引脚分别与k210的3v3引脚、18引脚、19 引脚、20引脚、gnd引脚相连接。
29.当双足机器人在连续行走时,六轴传感器将持续测量水平方位角,当其与初始值偏差超过
±5°
时,机器人调用不同动作组进行姿态调整,以达到直线行走的目的;当超声波传感器检测距离小于设定值时,机器人转弯;当转弯动作完成后,机器人的主控制器将六轴传感器检测到的此时的方位角度与初始化角度进行比较,若六轴传感器检测到的此时的方位角度在 90
°±5°
范围内时,机器人调用直线行走的动作,若六轴传感器检测到的此时的方位角度不在90
°±5°
范围内时,机器人调用不同的动作组完成姿态调整。
30.本实施例同时采用了超声波传感器和六轴传感器,在主控制器的控制下协调工作,使机器人完成了避障和方位调整的功能,提高了机器人避障的精确性和稳定性。
31.本实施例中,识别控制器采用k210板;k210板通过gpio与主控制器连接,实现信号的传输。工作时,主控制器发出信号到k210板中并执行中断,k210接收到信号后开始识别和播报工作,当识别到物体时,k210调用语音模块播报相应音频,同时发出信号到主控制器
中,主控制器结束中断,向舵机控制板发出指令,做出相应避让动作;麦克风接收持续接收声音,当k210识别出特定语音指令时,向主控器发出信号,主控器舵机控制板发出指令,做出相应动作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。