1.本发明涉及分子生物学领域,特别是涉及一种高速生物摇床的精准定位机构。
背景技术:
2.分子生物学(molecular biology)是从分子水平研究生物大分子的结构与功能从而阐明生命现象本质的科学。自20世纪50年代以来,分子生物学是生物学的前沿与生长点,其主要研究领域包括蛋白质体系、蛋白质-核酸体系(中心是分子遗传学)和蛋白质-脂质体系(即生物膜)。
3.在进行分子生物实验时,高速生物摇床作为一种常用的实验室设备被使用,但是现有的生物摇床领域对摇床运动平台的定位是很难实现的,特别是在高速生物摇床领域。由于高速生物摇床的转速一般都是在每分钟一千转以上,在高速状态运行下,使运动平台在短时间内暂停的同时又要保证整个运动平台最终停在预设位置,这个过程是很复杂的。随着无人化实验室的逐步推进,在生物培养领域,生物摇床与机械臂协同作业已经越来越普遍了。这就对生物摇床的精准定位要求越来越高。
技术实现要素:
4.本发明的目的在于,提供一种高速生物摇床的精准定位机构,以实现在高速状态下运动平台的精准停靠和快速平稳停止,且可以及时进行转速矫正和转速控制。
5.为解决上述技术问题,本发明提供一种高速生物摇床的精准定位机构,包括伺服电机输出端、偏心轴、电机连接盘、定位配重块、定位磁铁以及霍尔感应器;
6.所述伺服电机主体顶端安装有偏心轴,所述偏心轴表面安装有电机连接盘,所述偏心轴顶端设置有定位配重块,且定位配重块远离偏心轴一侧表面设置有定位磁铁,所述摇轴上板表面安装有霍尔感应器。
7.进一步的,所述伺服电机主体表面安装的两块摇轴板之间通过支撑柱固定连接。
8.进一步的,所述伺服电机主体通过偏心轴与电机连接盘构成传动结构。
9.进一步的,所述定位配重块通过偏心轴在电机连接盘内壁构成驱动。
10.进一步的,所述电机连接盘表面设置有信号穿过孔,所述信号穿过孔尺寸与定位磁铁一致。
11.进一步的,所述霍尔感应器通过摇轴上板表面的螺纹卡扣固定在摇轴上板表面。
12.相比于现有技术,本发明至少具有以下有益效果:在整个运动机构上添加了一个定位配重块和霍尔感应器。首先,配重块的安装可以平衡掉偏心轴产生的向心力,使整个驱动机构达到一个动平衡,提高机器的稳定性;其次是在定位配重块上安装有一个定位磁铁,当电机转过一圈后,磁铁就会通过信号穿过孔被霍尔感应器抓取到信号,进而将信号传递至控制系统。通过这个反馈系统,可随时将平台的位置信息以信号形式反馈给控制系统,进而实现生物摇床平台的精准定位。通过反馈系统,还可以将实际转速与设置转速进行比较,从而矫正实际转速与设置转速的偏差,使运行过程中转速精准控制。
附图说明
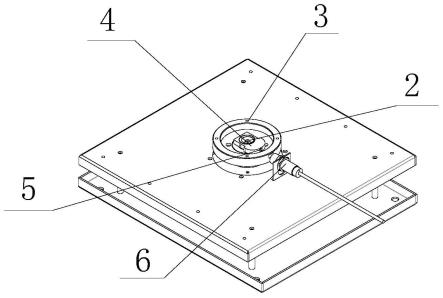
13.图1为本发明高速生物摇床的精准定位机构的整体立体结构示意图;
14.图2为本发明高速生物摇床的精准定位机构侧面剖析结构示意图;
15.图3为本发明高速生物摇床的精准定位机构驱动结构的整体结构示意图;
16.图4为本发明高速生物摇床的精准定位机构霍尔感应器的整体结构示意图。
具体实施方式
17.下面将结合示意图对本发明的高速生物摇床的精准定位机构进行更详细的描述,其中表示了本发明的优选实施例,应该理解本领域技术人员可以修改在此描述的本发明,而仍然实现本发明的有利效果。因此,下列描述应当被理解为对于本领域技术人员的广泛知道,而并不作为对本发明的限制。
18.在下列段落中参照附图以举例方式更具体地描述本发明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
19.如图1和图2所示,本发明实施例提出了一种高速生物摇床的精准定位机构,包括伺服电机输出端1、偏心轴2、电机连接盘3、定位配重块4、定位磁铁5以及霍尔感应器6;
20.所述伺服电机顶主体101顶端安装有偏心轴2,所述偏心轴2表面安装有电机连接盘3,所述偏心轴2顶端设置有定位配重块4,且定位配重块4远离偏心轴2一侧表面设置有定位磁铁5,所述摇轴上板103表面安装有霍尔感应器6。
21.在本实施方式中,如图1所示,在进行作业时启动伺服电机主体101,伺服电机主体101带动偏心轴2旋转,进而带动偏心轴2表面的电机连接盘3工作,偏心轴2产生的振幅通过电机连接盘3传递至生物摇床的运动平台,同时偏心轴2设置的点位配重块4在伺服电机主体101的驱动下,在电机连接盘3的内壁表面旋转工作,将电机连接盘3工作时所产生的向心力进行平衡,实现了在工作时使整个驱动达到一个动态平衡的状态,大大提升了摇床在运行时的稳定性,同时定位配重块4一侧表面设置有定位磁铁5,当定位配重块4在电机连接盘3内部旋转一圈后,定位磁铁5通过电机连接盘3表面的信号穿过孔,被安装在摇轴上板103表面的霍尔感应器6抓取到信号,进而将信号传递至控制系统。通过这个反馈系统,可随时将平台的位置信息以信号形式反馈给控制系统,进而实现生物摇床平台的精准定位。通过反馈系统,还可以将实际转速与设置转速进行比较,从而矫正实际转速与设置转速的偏差,实现运行过程中转速精准控制。
22.所述伺服电机主体101表面安装的两块摇轴板之间通过支撑柱104固定连接。在本实施方式中,通过摇轴上板103以及摇轴下板通过支撑柱固定连接,同时将伺服电机固定在摇轴上板以及摇轴下板102之间,使的在伺服电机主体101在工作过程中不会由于电机连接盘3以及运动平台的振幅而导致自身运行不稳。
23.所述伺服电机主体101通过偏心轴2与电机连接盘3构成传动结构。在本实施方式中,伺服电机主体101运转时带动偏心轴2旋转,同时电机连接盘3在偏心轴2的作用下发生振幅运动,进而电机连接盘3将振幅传导至运动平台进行作业。
24.所述定位配重块4通过偏心轴2在电机连接盘3内壁构成驱动,如图3所示,在本实施方式中,所述电机连接盘3表面设置有信号穿过孔,所述信号穿过孔尺寸与定位磁铁5一
致,由于运动机构上添加了一个定位配重块4和霍尔感应器5。定位配重块4的安装可以平衡掉偏心轴2产生的向心力,使整个驱动机构达到一个动态平衡,提高机器的稳定性;其次是在定位配重块4上安装有一个定位磁铁5,当伺服电机主体1转过一圈后,定位磁铁5通过信号穿过孔被霍尔感应器6抓取到信号。
25.所述霍尔感应器6通过摇轴上板103表面的螺纹卡扣603固定在摇轴上板103表面。在本实施方式中,通过将定位磁铁5的信号通过霍尔感应器6传递至控制系统。可随时将平台的位置信息以信号形式反馈给控制系统,进而实现生物摇床平台的精准定位。通过反馈系统,还可以将实际转速与设置转速进行比较,从而矫正实际转速与设置转速的偏差,使运行过程中转速精准控制。
26.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
技术特征:
1.一种高速生物摇床的精准定位机构,其特征在于,包括伺服电机输出端、偏心轴、电机连接盘、定位配重块、定位磁铁以及霍尔感应器;所述伺服电机顶主体顶端安装有偏心轴,所述偏心轴表面安装有电机连接盘,所述偏心轴顶端设置有定位配重块,且定位配重块远离偏心轴一侧表面设置有定位磁铁,所述摇轴上板表面安装有霍尔感应器。2.如权利要求1所述的高速生物摇床的精准定位机构,其特征在于,所述伺服电机主体表面安装的两块摇轴板之间通过支撑柱固定连接。3.如权利要求1所述的高速生物摇床的精准定位机构,其特征在于,所述伺服电机主体通过偏心轴与电机连接盘构成传动结构。4.如权利要求1所述的高速生物摇床的精准定位机构,其特征在于,所述定位配重块通过偏心轴在电机连接盘内壁构成驱动。5.如权利要求1所述的高速生物摇床的精准定位机构,其特征在于,所述电机连接盘表面设置有信号穿过孔,所述信号穿过孔尺寸与定位磁铁一致。6.如权利要求1所述的高速生物摇床的精准定位机构,其特征在于,所述霍尔感应器通过摇轴上板表面的螺纹卡扣固定在摇轴上板表面。
技术总结
本发明揭示了一种高速生物摇床的精准定位机构,一种高速生物摇床的精准定位机构,其特征在于,包括伺服电机输出端、偏心轴、电机连接盘、定位配重块、定位磁铁以及霍尔感应器;所述伺服电机顶主体端安装有偏心轴,所述偏心轴表面安装有电机连接盘,所述偏心轴顶端设置有定位配重块,且定位配重块远离偏心轴一侧表面设置有定位磁铁,所述摇轴上板表面安装有霍尔感应器。本发明至少具有以下有益效果:在整个运动机构上添加了一个定位配重块和霍尔感应器。配重块的安装可以平衡掉偏心轴产生的向心力,使整个驱动机构达到一个动平衡,提高机器的稳定性。的稳定性。的稳定性。
技术研发人员:况云飞 周攀 曹凯 钱兵 钱俊
受保护的技术使用者:上海知楚仪器有限公司
技术研发日:2022.06.16
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
