1.本发明涉及垃圾清扫车技术领域,具体为一种无人驾驶垃圾自动清扫车。
背景技术:
2.随着国民经济的日益发展,科学技术的不断进步,人们更加重视公共环境的清洁。机动车道的清扫,目前多由大型清扫车进行清扫,道路环境不断改善;而对于非机动车道的清扫,大多仍是依靠环卫工人清扫,清洁效率低且安全性差,同时,非机动车道作为行人及非机动车出现概率较大的车道,其清洁度更不容忽视。
3.为了降低非机动车道环卫工人的劳动强度,提高交通安全性及清扫效率,本发明中,提出了一种新型的无人驾驶垃圾自动清扫车,有效替代工人劳动,提高清扫效率。
技术实现要素:
4.本发明的目的在于提供一种无人驾驶垃圾自动清扫车,该清扫车可以有效减轻人工劳动强度,提高清扫效率。
5.本发明采用以下技术方案:一种无人驾驶垃圾自动清扫车,其包括:
6.清扫车本体,所述清扫车本体底部的侧面开设有容纳槽;
7.摄像模块,所述摄像模块设置在所述清扫车本体的顶部;
8.多个测距模块,多个所述测距模块分别设置在所述清扫车本体的车头、车尾与车身两侧;
9.至少一个清洁模块,所述清洁模块包括设置在所述清扫车本体内部的吸尘机构、以及设置在所述容纳槽处的伸缩机构和刷扫机构,所述刷扫机构设置在伸缩机构的伸缩端;
10.分类模块,所述分类模块设置在清扫车本体的内部;所述分类模块包括筒体、管体与两个废料仓,在所述筒体的内部设置一分隔板,将所述筒体分隔为两部分;两个所述废料仓均设置在所述筒体的下方,分别与所述筒体的两部分相对设置;所述管体垂直设置在所述分隔板上,所述管体的入口端与所述吸尘机构的出料端相连,所述管体的出口端贯穿所述分隔板;在所述管体的外壁面上设置有磁吸组件,并在所述管体内部设置有推移组件;
11.洒水模块,所述洒水模块设置在所述伸缩机构的伸缩端,并设置在所述刷扫机构的上方。
12.进一步的,所述伸缩机构包括:
13.第一伸缩件,所述第一伸缩件安装在所述清扫车本体的容纳槽处;
14.导向板,所述导向板固定安装在所述第一伸缩件的伸缩端,并与所述清扫车本体间滑动连接;
15.第二伸缩件,所述第二伸缩件安装在所述导向板的底部,且所述第二伸缩件的伸缩方向与所述第一伸缩件的伸缩方向相互垂直。
16.进一步的,所述刷扫机构包括:
17.第一壳体,所述第一壳体呈中空圆柱状,固定安装在所述第二伸缩件的伸缩端,并在所述第一壳体的内部设置有驱动组件;
18.第二壳体,所述第二壳体为中空的底部开口结构,固定安装在所述第一壳体的底部,并在所述第二壳体的内部设置有与所述驱动组件传动连接的传动组件;在所述传动组件的输出端设有第一清洁刷和第二清洁刷。
19.进一步的,所述驱动组件包括驱动电机、齿轮与第一齿圈;
20.其中,所述驱动电机与所述清扫车本体固定连接,且所述驱动电机的输出端与所述齿轮传动连接;所述第一齿圈套设在所述齿轮的外侧,与所述齿轮内啮合传动;
21.所述第二壳体的上端面上转动连接有环形件,所述第一齿圈的底部设有多个贯穿所述环形件的连接杆,所述连接杆的下端延伸至第二壳体的内部,与所述传动组件传动连接。
22.进一步的,所述传动组件包括行星架、多个行星轮以及第二齿圈;
23.其中,所述行星架包括第一环形板、以及平行设置在所述第一环形板上层的第二环形板,所述第一环形板与所述第二环形板间固定连接,并在所述第一环形板与所述第二环形板之间固定安装多个竖直设置的连接轴,用于连接所述第一环形板与所述第二环形板;
24.多个所述行星轮分别套设安装在所述连接轴上,并与所述连接轴转动连接;所述第二齿圈与所述第二壳体固定连接,套设在多个所述行星轮的外侧,并与多个所述行星轮间啮合传动连接;
25.所述第一清洁刷设置多个,分别固定安装在所述行星轮的底部;所述第二清洁刷固定安装在所述第二环形板的底部。
26.进一步的,所述行星轮设置至少两个,多个所述行星轮沿所述第二齿圈的圆周方向均匀分布;所述第一清洁刷和第二清洁刷均由环形片和刷毛组成,且所述第一清洁刷位于第二清洁刷的环形片的内侧。
27.进一步的,所述吸尘机构的进料侧设有输料管,所述输料管的一端与所述吸尘机构的进料端相连,另一端则依次穿入第一壳体和第二壳体,与吸头的顶部连通;所述吸头设置在多个所述行星轮之间位置处;
28.所述吸尘机构的出料侧设有连接管,所述连接管从管体一端的上方倾斜插入,并且与管体的内部连通。
29.进一步的,所述推移组件包括设置在管体入口端的驱动件,所述管体的出口端贯穿分隔板,伸入至所述筒体的另一侧;
30.所述驱动件的输出端设置有沿管体轴向分布的螺旋杆,所述螺旋杆的螺旋片与管体的内壁之间具有2~3mm的间隙,所述管体设有驱动件一侧的底部具有沿管体轴向分布的条形通槽。
31.进一步的,所述筒体的轴向沿水平方向设置,并且筒体圆周面的下侧具有多个通孔,所述两个废料仓分别位于分隔板的两侧。
32.进一步的,所述洒水模块包括水箱、水泵、水管和沿水管间隔设置的多个喷头,所述水箱安装在所述清扫车本体上,并通过水泵与所述水管相连;所述水管固定安装在所述导向板上。
33.与现有技术相比,本发明一种无人驾驶垃圾自动清扫车的有益效果为:
34.1)本发明一种无人驾驶垃圾自动清扫车,通过在清扫车本体上设置摄像模块、测距模块,可以对道路的实时信息进行分析,从而实现无人驾驶;同时,通过设置在车体两侧的清洁模块,自动清扫道路上的垃圾,相较于常规的清扫车,本清扫车的清洁模块设置有第一清洁刷和第二清洁刷,进行垃圾清扫工作,减轻人工劳动强度,提高清扫效率。此外,本发明通过在清扫车本体内设置分类模块,可以实现对铁磁性材质垃圾的分选;设置洒水模块,将水喷洒在地面上,使污垢更容易被刷去。
35.2)本发明中通过设置驱动组件和传动组件,使驱动组件和传动组件共同带动第一清洁刷和第二清洁刷旋转,传动组件由吸头、行星轮、第二齿圈以及行星架组成,通过固定第二齿圈,使行星架带动行星轮沿着第二齿圈滚动,行星架在旋转时带动第二清洁刷同步旋转,并且使行星轮在第二齿圈的内侧公转,公转的方向与第二清洁刷的旋转方向一致,同时行星轮与第二齿圈啮合,故行星架旋转的方向与行星轮的自转的方向相反,从而使第一清洁刷和第二清洁刷的旋转方向相反,通过对污垢的反复刮擦提高对垃圾、污垢的刷扫力度,同时通过吸尘机构将刷扫下来的污垢吸掉,从而不需要二次打扫,提高清洁效率。
36.3)分类模块设置磁吸组件,可以吸附铁磁性材质的垃圾,使其贴着管体的内壁,而非铁磁性材质垃圾则直接穿过通槽落入废料仓内,再通过螺旋杆的旋转,通过螺旋杆上螺旋片的推动将铁磁性材质垃圾沿着管体移动直至落入另一个废料仓内,从而实现对不同材质垃圾的分选,有助于减少垃圾回收分类的工作量,有助于垃圾环保回收。
37.4)本发明中导向板一侧设置了水管,水管底部设置了喷头,通过水泵将水加压从喷头喷出,在道路上边喷水边清扫,更易于去除粘连在路面上的污渍,从而使道路可以保持清洁,并且减少环卫工人的工作量。
附图说明
38.为了更清楚的说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
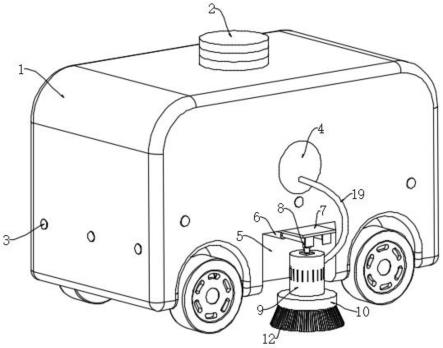
39.图1为本发明具体实施例提供的无人驾驶垃圾自动清扫车整体结构示意图;
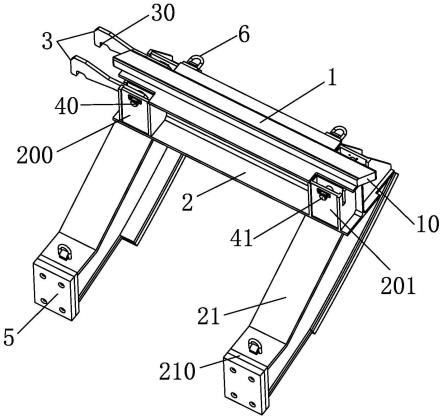
40.图2为本发明具体实施例提供的清洁模块整体结构示意图;
41.图3为本发明具体实施例提供的清洁模块爆炸结构示意图;
42.图4为本发明具体实施例提供的驱动组件结构示意图;
43.图5为本发明具体实施例提供的分类模块结构示意图;
44.图6为本发明具体实施例提供的水管和喷头结构示意图。
45.图中:1、清扫车本体;2、摄像模块;3、测距模块;4、吸尘机构;5、容纳槽;6、第一伸缩件;7、导向板;8、第二伸缩件;9、第一壳体;10、第二壳体;11、第一清洁刷;12、第二清洁刷;121、环形片;122、刷毛;13、齿轮;14、第一齿圈;15、吸头;16、行星轮;17、第二齿圈;18、行星架;181、第一环形板181;182、第二环形板;19、输料管;20、环形件;21、连接杆;22、筒体;23、隔板;24、管体;25、连接管;26、磁吸装置;27、驱动件;28、螺旋杆;29、通槽;30、通孔;31、废料仓;32、水管;33、喷头。
具体实施方式
46.下面将结合本发明中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通的技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明的保护范围。
47.下面结合附图1至附图6以及具体实施例详细论述本发明:
48.如图1-6所示,本发明提供了一种无人驾驶垃圾自动清扫车,用于垃圾的清扫,其包括清扫车本体1、摄像模块2、至少一个清洁模块、分类模块与洒水模块。
49.其中,在清扫车本体1底部的侧面开设有容纳槽5;将所述摄像模块2设置在所述清扫车本体1的顶部,摄像模块2用于采集车辆周围的图像信息;多个所述测距模块3分别设置在所述清扫车本体1的车头、车尾与车身两侧,测距模块3采用红外或超声波传感器,用于距离监测等。
50.所述清洁模块可以设置多个,如本实施中,该清洁模块设置两个,分别设置在清扫车本体1的两侧,位于车辆的两个侧面处。其包括设置在所述清扫车本体1内部的吸尘机构4、以及设置在所述容纳槽5处的伸缩机构和刷扫机构,所述刷扫机构设置在伸缩机构的伸缩端。
51.分类模块设置在清扫车本体1的内部;所述分类模块包括筒体22、管体24与两个废料仓31,在所述筒体22的内部设置一分隔板23,将所述筒体22分隔为两部分,包括第一部分与第二部分。两个所述废料仓31均设置在所述筒体22的下方,分别与所述筒体22的两部分相对设置,即筒体22的第一部分与第二部分分别两个废料仓31一一对应设置。所述管体24垂直设置在所述分隔板23上,所述管体24的入口端与所述吸尘机构4的出料端相连,所述管体24的出口端贯穿所述分隔板23;在所述管体24的外壁面上设置有磁吸组件26,并在所述管体24内部设置有推移组件;本实施例中,管体24两侧的外壁面均设有磁吸组件26。使用时,通过吸尘机构4吸入的垃圾输入至管体24内,并通过磁吸组件26的磁吸功能,对铁磁性以及非铁磁性材质的垃圾进行分选,实现垃圾分类存放。
52.洒水模块,所述洒水模块设置在所述伸缩机构的伸缩端,并位于所述刷扫机构的上方。洒水模块将水喷洒在地面上,使污垢更容易被刷去。本实施例中,该洒水模块包括水箱、水泵、水管32和沿水管32间隔设置的多个喷头33,所述水箱安装在所述清扫车本体1上,并通过水泵与所述水管32相连;所述水管32固定安装在所述导向板7上,并位于车辆前进方向的一侧。本发明中导向板7一侧设置了水管32,水管32底部设置了喷头33,通过水泵将水加压从喷头33喷出,在道路上边喷水边清扫,更易于去除粘连在路面上的污渍,从而使道路可以保持清洁,并且减少环卫工人的工作量。
53.本发明中通过在清扫车本体1上设置摄像模块2、测距模块3,可以对道路的实时信息进行分析,从而实现无人驾驶,同时通过设置在车体两侧的清洁模块,自动清扫道路上的垃圾,相较于常规的清扫车,本清扫车的清洁模块设置有第一清洁刷10和第二清洁刷11,进行垃圾清扫工作,减轻人工劳动强度,提高清扫效率。
54.具体的,如图1所示,所述伸缩机构包括第一伸缩件6、导向板7与第二伸缩件8。其中,所述第一伸缩件6安装在所述清扫车本体1的容纳槽5处。所述导向板7固定安装在所述第一伸缩件6的伸缩端,并与所述清扫车本体1间滑动连接;而该清扫车本体1与导向板7间
滑动连接的实现方式,本发明中不做具体限定,可以采用滑轨和滑座的形式,即在导向板7的四角处分别固定安装有滑座,在清扫车本体1的容纳槽5处设置两根相互平行的滑轨,将滑座滑动安装在滑轨上,实现清扫车本体1与导向板7间的滑动连接。所述第二伸缩件8安装在所述导向板7的底部,且所述第二伸缩件8的伸缩方向与所述第一伸缩件6的伸缩方向相互垂直,即第一伸缩件6用于水平伸缩,可以将刷扫机构从容纳槽5中推出;第二伸缩件8用于上下伸缩,使刷扫机构可以贴合地面,进行垃圾吸取以及污垢清洁,以使该伸缩机构方便清洁模块的收纳。需要说明的,本发明中,对第一伸缩件6与第二伸缩件8的具体结构不做限定,可以采用现有可伸缩的结构,也可由本领域技术人员依据实际情况自行设计,只要能实现伸缩功能即可,都属于本发明的保护范围。
55.具体的,如图2、图3和图4所示,所述刷扫机构包括第一壳体9与第二壳体10。其中,所述第一壳体9呈中空圆柱状,固定安装在所述第二伸缩件8的伸缩端,并在所述第一壳体9的内部设置有驱动组件。所述第二壳体10为中空的底部开口结构,固定安装在所述第一壳体9的底部,并在所述第二壳体10的内部设置有与所述驱动组件传动连接的传动组件。同时,在所述传动组件的输出端设有第一清洁刷11和第二清洁刷12。使用时,启动驱动组件,并将输入动力通过传动组件传输给第一清洁刷11和第二清洁刷12,实现清扫功能。
56.该驱动组件包括驱动电机、齿轮13与第一齿圈14。其中,所述驱动电机与所述清扫车本体1固定连接,且所述驱动电机的输出端与所述齿轮13传动连接;所述第一齿圈14套设在所述齿轮13的外侧,与所述齿轮13内啮合传动。所述第二壳体10的上端面上转动连接有环形件20,所述第一齿圈14的底部设有多个贯穿所述环形件20的连接杆21,所述连接杆21的下端延伸至第二壳体10的内部,与所述传动组件传动连接。工作时,驱动电机带动齿轮13旋转,从而带动第一齿圈14旋转,进一步通过连接杆21带动传动组件中的行星架18旋转。
57.该传动组件包括行星架18、多个行星轮16以及第二齿圈17。其中,所述行星架18包括第一环形板181、以及平行设置在所述第一环形板181上层的第二环形板182,所述第一环形板181与所述第二环形板182间固定连接,并在所述第一环形板181与所述第二环形板182之间固定安装多个竖直设置的连接轴,用于连接所述第一环形板181与所述第二环形板182,将二者固定连接在一起,组成行星架18。同时,将连接杆21的下端延伸至第二壳体10的内部,与所述传动组件中的第一环形板181间固定连接,进而将第一齿圈14、环形件20与行星架18连接为一体式结构,故第一齿圈14可以带动行星架18同步旋转。
58.多个所述行星轮16分别套设安装在所述连接轴上,并与所述连接轴转动连接。所述第二齿圈17与所述第二壳体10固定连接,套设在多个所述行星轮16的外侧,与多个所述行星轮16间啮合传动连接。此外,将所述第一清洁刷11设置多个,与行星轮16的数量相匹配,分别固定安装在所述行星轮16的底部;将所述第二清洁刷12固定安装在所述第二环形板182的底部。
59.工作时,由驱动电机带动齿轮13旋转,带动第一齿圈14旋转;由第一齿圈14带动行星架18同步旋转,行星架18旋转带动行星轮16沿着第二齿圈17啮合传动,使行星轮16既自转又公转,由于第二清洁刷12与行星架18为固定连接,故二者的旋转方向与行星轮16的公转方向一致,但由于第二齿圈17是固定的,故行星轮16的自转方向与行星架18旋转的方向不同,因此第一清洁刷11与第二清洁刷12的旋转方向相反。车辆行驶的过程中,第一清洁刷11和第二清洁刷12不断与路面进行摩擦,通过不断改变刷扫方向可将路面上的污垢快速刷
去,而第一清洁刷11与第二清洁刷12的旋转方向相反,可以更好的提好的清洁效果。本清扫车的清洁模块设置有第一清洁刷11和第二清洁刷12,两个清洁刷的旋转方向相反,在清扫时可以对垃圾、污垢进行多次不同方向的刷扫,故可以有效提高清扫的洁净度,减少粘连在道路上的垃圾、污垢。
60.本发明中通过设置驱动组件和传动组件,使驱动组件和传动组件共同带动第一清洁刷11和第二清洁刷12旋转,传动组件由吸头15、行星轮16、第二齿圈17以及行星架18组成,通过固定第二齿圈17,使行星架18带动行星轮16沿着第二齿圈17滚动,行星架18在旋转时带动第二清洁刷12同步旋转,并且使行星轮16在第二齿圈17的内侧公转,公转的方向与第二清洁刷12的旋转方向一致,同时行星轮16与第二齿圈17啮合,故行星架18旋转的方向与行星轮16的自转的方向相反,从而使第一清洁刷11和第二清洁刷12的旋转方向相反,通过对污垢的反复刮擦提高对垃圾、污垢的刷扫力度,同时通过吸尘机构4将刷扫下来的污垢吸掉,从而不需要二次打扫,提高清洁效率。
61.具体的,所述行星轮16设置至少两个,多个所述行星轮16沿所述第二齿圈17的圆周方向均匀分布。本实施例中,行星轮16设置三个,均布。而第一清洁刷11与第二清洁刷12均呈喇叭状,清扫效果好。本实施例中,该第一清洁刷11和第二清洁刷12均由环形片121和刷毛122组成,且所述第一清洁刷11位于第二清洁刷12的环形片121的内侧。
62.具体的,如图1、图5所示,所述吸尘机构4的进料侧设有输料管19,所述输料管19的一端与所述吸尘机构4的进料端相连,另一端则依次穿入第一壳体9和第二壳体10,与吸头15的顶部连通;所述吸头15设置在多个所述行星轮16之间位置处。所述吸尘机构4的出料侧设有连接管25,所述连接管25从管体24一端的上方倾斜插入,并且与管体24的内部连通;由吸头15将垃圾经输料管19、连接管25输送至分类模块中的管体24处,进行垃圾分类。
63.该推移组件包括设置在管体24入口端的驱动件27,所述管体24的出口端贯穿分隔板23,伸入至所述筒体22的另一侧;所述驱动件27的输出端设置有沿管体24轴向分布的螺旋杆28,所述螺旋杆28的螺旋片与管体24的内壁之间具有2-3mm的间隙,所述管体24设有驱动件27一侧的底部具有沿管体24轴向分布的条形通槽29。同时,该筒体22的轴向沿水平方向设置,并且筒体22圆周面的下侧具有多个通孔30,两个废料仓31分别位于分隔板23的两侧。
64.垃圾通过吸头15和输料管19进入吸尘机构4,再通过连接管25排入管体24内,磁吸组件26可以吸附铁磁性材质垃圾,而非铁磁性材质垃圾则穿过通槽29和通孔30落入废料仓31内,而铁磁性材质垃圾收到磁吸作用贴着管体24内壁,随着螺旋杆28的带动,沿着管体24移动至隔板23的另一侧,从管体24中被螺旋杆28推出,进而落入另一个废料仓31内。
65.本发明通过在清扫车本体1内设置分类模块,可以实现对铁磁性材质垃圾的分选,分类模块设置磁吸组件26,可以吸附铁磁性材质的垃圾,使其贴着管体24的内壁,而非铁磁性材质垃圾则直接穿过通槽29落入废料仓31内,再通过螺旋杆28的旋转,通过螺旋杆28上螺旋片的推动将铁磁性材质垃圾沿着管体24移动直至落入另一个废料仓31内,从而实现对不同材质垃圾的分选,有助于减少垃圾回收分类的工作量,有助于垃圾环保回收。
66.该无人驾驶垃圾自动清扫车的清扫方法,首先控制伸缩机构使其伸缩端延伸,拉伸第一伸缩件6和第二伸缩件8使刷扫机构移动至清扫车本体1的侧面,并且使第一清洁刷11和第二清洁刷12贴合路面;随后,启动清扫车本体1,在车辆行驶的过程中,启动水泵将水
从喷头33处喷洒出来,同时启动吸尘机构4将从路面刷扫下来的垃圾、污垢排入分类模块,通过推移组件和磁吸组件26对铁磁性、非铁磁性材质的垃圾进行分类。
[0067][0068]
以上借助具体实施例对本发明做了进一步描述,但是应该理解的是,这里具体的描述,不应理解为对本发明的实质和范围的限定,本领域内的普通技术人员在阅读本说明书后对上述实施例做出的各种修改,都属于本发明所保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。